Miglioramento della navigazione delle auto autonome
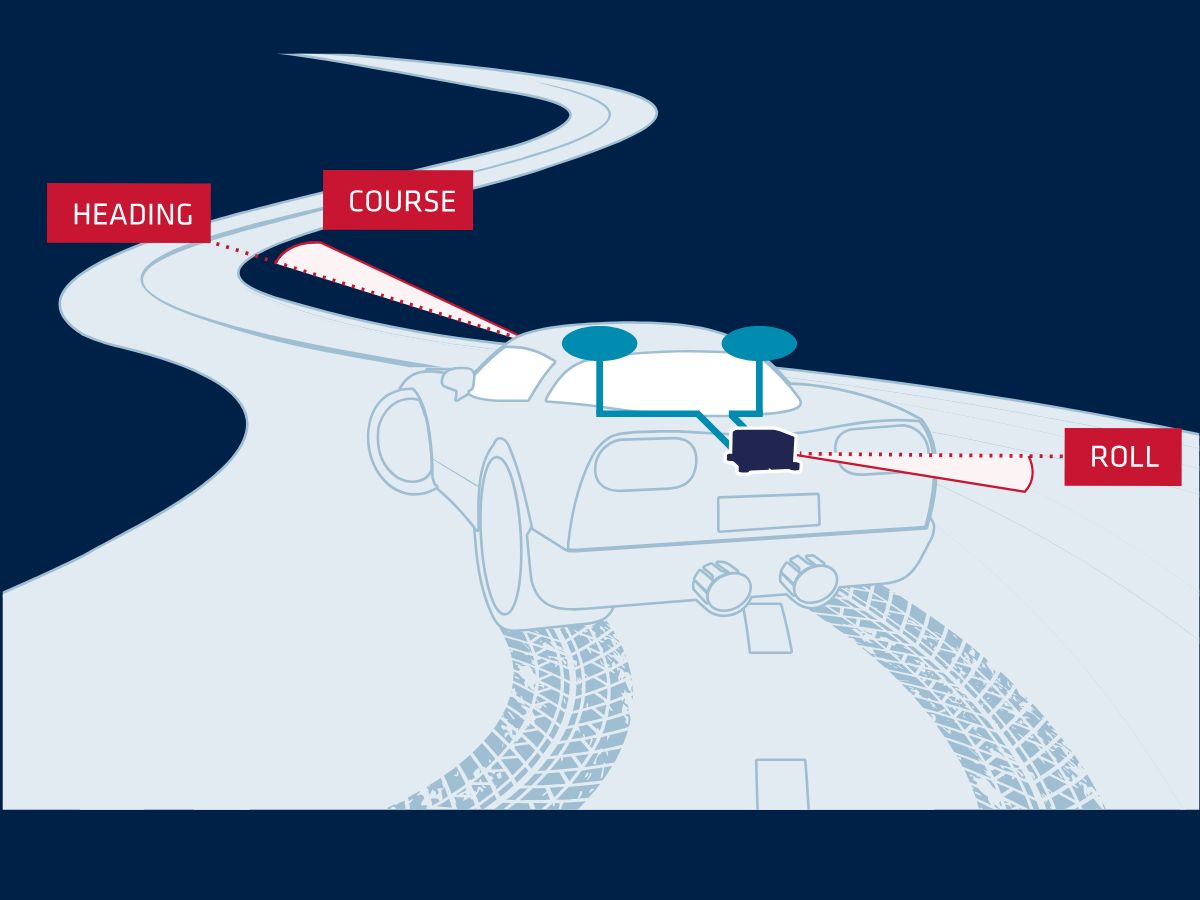
I nostri sistemi di navigazione inerziale (INS) forniscono rollio, beccheggio e direzione in tempo reale, integrati con un ricevitore GNSS per mantenere la precisione durante le interruzioni del segnale. Sincronizzano e stabilizzano con precisione apparecchiature aggiuntive, come LiDAR o telecamere, per applicazioni di auto senza conducente.
Inoltre, l'integrazione di un INS con altri sensori crea una comprensione completa dell'ambiente del veicolo. Questa integrazione consente la navigazione in scenari complessi e dinamici con maggiore precisione.

Miglioramento della sicurezza e dell'affidabilità dei veicoli a guida autonoma
Uno degli ambienti più impegnativi per le auto a guida autonoma è quello urbano, dove GNSS possono essere ostacolati da edifici alti e le condizioni del traffico possono cambiare rapidamente. INS la precisione e l’affidabilità necessarie per muoversi in sicurezza in questi ambienti.
INS nostri INS utilizzano la tecnologia dei sistemi Micro(MEMS). Ciò consente di realizzare sensori più piccoli, più precisi e più efficienti dal punto di vista energetico, migliorando le prestazioni complessive INS auto a guida autonoma.
Sistemi di navigazione inerziale per auto a guida autonoma
I nostri sistemi di navigazione inerziale sono progettati per fornire l'accuratezza e l'affidabilità ineguagliabili necessarie per navigare in ambienti complessi, come i canyon urbani, con sicurezza.
Abbiamo creato soluzioni INS avanzate che si integrano perfettamente con i sistemi dei vostri veicoli autonomi, fornendo dati in tempo reale che garantiscono un posizionamento preciso e un controllo fluido e accurato. Dalle strade urbane ai terreni difficili, potenziamo la vostra tecnologia di auto a guida autonoma con le robuste capacità di navigazione ad alte prestazioni necessarie per ottenere un funzionamento autonomo sicuro, affidabile ed efficiente.

Scopri le nostre soluzioni per le auto a guida autonoma
Guida il futuro della mobilità autonoma con noi, dove l'innovazione incontra la precisione e ogni viaggio è guidato con un'accuratezza senza pari. Scopri le nostre soluzioni per la navigazione di auto a guida autonoma.

Ellipse-D

Ekinox Micro

Ekinox-D
Brochure sulle applicazioni autonome
Ricevi la nostra brochure istantaneamente nella tua casella di posta!
Casi di studio
Esplora come la nostra tecnologia inerziale sta ridefinendo il panorama dei veicoli a guida autonoma nella nostra sezione dedicata ai casi di studio. Questi esempi reali dimostrano come i nostri sensori avanzati consentano una navigazione precisa e prestazioni robuste. Le nostre soluzioni migliorano la sicurezza in ambienti urbani complessi. Garantiscono una funzionalità ottimale anche in assenza di segnali GNSS.

Rilevamento dei difetti delle rotaie di TREALIS con Apogee Navsight
Posizionamento di tram e treni
Come GapEOD garantisce rilievi geofisici più sicuri grazie a Ellipse
Posizionamento di tram e treni
Ricerca sui traghetti autonomi nei corsi d'acqua urbani reali
Navigazione autonoma dei traghetti


Parlano di noi
Ascolta in prima persona gli innovatori e i clienti che hanno adottato la nostra tecnologia.
Le loro testimonianze e storie di successo illustrano l'impatto significativo che i nostri sensori hanno nelle applicazioni pratiche dei veicoli autonomi.
Esplori altre potenziali applicazioni per veicoli autonomi
I veicoli autonomi stanno trasformando settori che vanno ben oltre il trasporto. Dall'agricoltura e la logistica all'edilizia e alla sorveglianza, le tecnologie di navigazione avanzate consentono operazioni più intelligenti, sicure ed efficienti. Esplora l'ampia gamma di applicazioni innovative potenziate dall'autonomia.
Ha delle domande?
Trova risposte alle domande più comuni sulle applicazioni che presentiamo. Le nostre FAQ forniscono spiegazioni chiare per ogni applicazione presentata. Aiuta gli utenti a comprendere i casi d'uso pratici e i benefici. Inoltre, se non trova le informazioni di cui ha bisogno, ci contatti direttamente.
Come funzionano le auto a guida autonoma?
Le auto a guida autonoma sono veicoli dotati di sistemi sofisticati che consentono loro di navigare e controllarsi senza intervento umano. Questi veicoli utilizzano una combinazione di sensori di guida autonoma e algoritmi per percepire l'ambiente circostante, prendere decisioni ed eseguire attività di guida autonoma. L'obiettivo è raggiungere la piena autonomia, in cui il veicolo è in grado di gestire tutti gli aspetti della guida in modo sicuro ed efficiente.
Le auto a guida autonoma si affidano a una serie di tecnologie chiave per percepire l'ambiente circostante, tra cui:
- GNSS (Global Navigation Satellite System): per ottenere aggiornamenti in tempo reale sulla posizione, la velocità e la direzione dell'auto a guida autonoma.
- INS (Inertial Navigation Systems): per mantenere la precisione in caso di interruzioni del segnale GNSS. Fornisce aggiornamenti in tempo reale sulla posizione, velocità e direzione dell'auto a guida autonoma.
- LiDAR (Light Detection and Ranging): utilizzo di raggi laser per creare una mappa 3D dettagliata dell'ambiente del veicolo. Questa tecnologia aiuta l'auto a rilevare e misurare gli oggetti circostanti, inclusi altri veicoli, pedoni e segnali stradali.
- Radar (Radio Detection and Ranging): uso di onde radio per rilevare la velocità, la distanza e la direzione degli oggetti. Il radar è particolarmente utile in condizioni meteorologiche avverse e per rilevare oggetti a distanze maggiori.
- Telecamere: per acquisire informazioni visive sull'ambiente circostante il veicolo, tra cui segnaletica orizzontale, segnali stradali e cartelli. Sono essenziali per interpretare segnali visivi complessi e prendere decisioni basate su dati visivi.
Qual è la differenza tra ADAS nelle auto e auto a guida autonoma?
I sistemi ADAS (Advanced Driver Assistance Systems) migliorano la sicurezza di guida fornendo funzionalità come il mantenimento della corsia, il cruise control adattivo e la frenata automatica, ma richiedono la supervisione attiva del conducente. Al contrario, le auto a guida autonoma, dotate di sistemi di guida autonoma, mirano ad automatizzare completamente il funzionamento del veicolo senza intervento umano.
Mentre l'ADAS supporta i conducenti assistendoli nelle attività e migliorando la sicurezza, le auto a guida autonoma sono progettate per gestire tutti gli aspetti della guida autonoma, dalla navigazione al processo decisionale, offrendo un livello più elevato di automazione (livelli SAE) e praticità. Le caratteristiche o le funzionalità ADAS sono attribuite ai livelli SAE inferiori a 3 e le auto a guida autonoma come tali corrispondono al livello minimo 4.
Come funziona il GPS?
Il GPS (Global Positioning System) funziona utilizzando una costellazione di satelliti, una temporizzazione precisa e la trilaterazione per determinare la posizione ovunque sulla Terra.
Ecco la spiegazione più semplice e chiara:
1 – I satelliti trasmettono segnali
Circa 30 satelliti GPS orbitano attorno alla Terra, ciascuno trasmettendo continuamente:
– La sua posizione esatta nello spazio
– L'ora esatta in cui il segnale è stato inviato (utilizzando orologi atomici)
Questi segnali viaggiano alla velocità della luce.
2 – Il ricevitore misura il tempo di propagazione
Un ricevitore GPS (nel telefono, drone, INS, ecc.) riceve segnali da più satelliti.
Misurando il tempo impiegato da ciascun segnale per arrivare, calcola la distanza:
distanza = velocità della luce × tempo di percorrenza
3 – La trilaterazione calcola la posizione
Per trovare la propria posizione, il ricevitore utilizza la trilaterazione (non la triangolazione):
- Con 1 satellite → potresti trovarti in qualsiasi punto di una sfera
- Con 2 satelliti → i cerchi si intersecano
- Con 3 satelliti → due punti possibili
- Con 4 satelliti → la tua posizione 3D esatta + correzione dell'orologio
Il suo ricevitore non dispone di un orologio atomico, quindi è necessario il quarto satellite per risolvere gli errori di temporizzazione.
4 – Le correzioni migliorano la precisione
Il GPS grezzo presenta errori dovuti a:
- Atmosfera (ionosfera, troposfera)
- Deriva dell'orologio satellitare
- Errori di previsione dell'orbita
- Riflessioni multipath (segnali che rimbalzano sugli edifici)
Per migliorare la precisione:
- SBAS (ad es. WAAS, EGNOS) fornisce correzioni in tempo reale
- Le tecniche RTK e PPP correggono gli errori fino al livello centimetrico
- L'accoppiamento INS (IMU + GPS) uniforma e colma le lacune durante la perdita di segnale
6 – Output finale
Il ricevitore combina tutti i dati per stimare:
- Latitudine
- Longitudine
- Altitudine
- Velocità
- Tempo preciso
I moderni ricevitori GPS lo fanno decine o centinaia di volte al secondo.
Cos'è un INS?
Un INS (Sistema di Navigazione Inerziale) è una soluzione di navigazione autonoma che determina la posizione, l'orientamento e la velocità di una piattaforma utilizzando esclusivamente sensori inerziali—tipicamente:
- Accelerometri (misurano l'accelerazione lineare)
- Giroscopi (misurano la rotazione angolare)
Come funziona?
I giroscopi tracciano come ruota la piattaforma (rollio, beccheggio, imbardata). Gli accelerometri misurano il movimento lungo tre assi. Un filtro di navigazione (solitamente un filtro di Kalman) integra queste misurazioni nel tempo per calcolare:
- Posizione (x, y, z)
- Velocità
- Assetto (orientamento)
Caratteristiche Chiave
- Completamente autonomo: nessun segnale esterno necessario per il funzionamento
- Frequenza di aggiornamento elevata: Spesso centinaia o migliaia di misurazioni al secondo
- Funziona in qualsiasi ambiente: sottoterra, sott'acqua, al chiuso e in ambienti privi di GPS
- La precisione dipende dal grado del sensore: Varia da IMU di grado consumer a INS di grado tattico e di navigazione.
Applicazioni Comuni
- Aerospaziale e difesa: missili, UAV, munizioni circuitanti, veicoli blindati
- Marino: AUV, USV, navi, sistemi idrografici
- Robotica terrestre: veicoli autonomi, SLAM, AGVs
- Rilevamento e mappatura: sistemi di mobile mapping, LiDAR
- Industriale: stabilizzazione, tracciamento del movimento
