Amélioration de la navigation des voitures autonomes
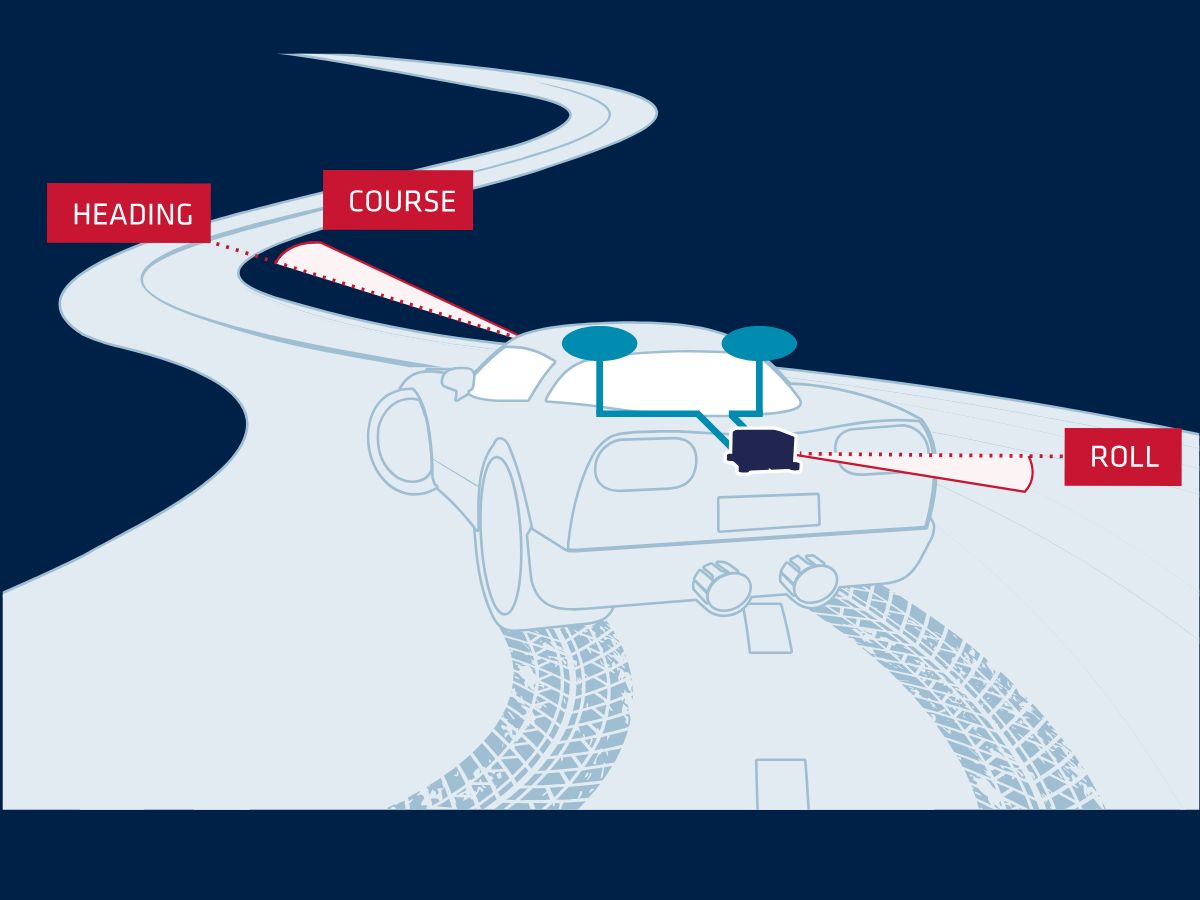
Nos systèmes de navigation inertielle (INS) fournissent le roulis, le tangage et le cap en temps réel. Intégrés à un récepteur GNSS, ils maintiennent la précision pendant les coupures de signal. Ils synchronisent et stabilisent avec précision les équipements supplémentaires, tels que les LiDAR ou les caméras, pour les applications de véhicules autonomes.
De plus, l'intégration d'un INS avec d'autres capteurs permet une compréhension exhaustive de l'environnement du véhicule. En outre, cette intégration permet la navigation dans des scénarios complexes et dynamiques avec une plus grande précision.

Amélioration de la sécurité et de la fiabilité des véhicules autonomes
L'un des environnements les plus difficiles pour les voitures autonomes est celui des zones urbaines, où les signaux GNSS peuvent être obstrués par de grands bâtiments et où les conditions de circulation peuvent changer rapidement. L'INS fournit la précision et la fiabilité nécessaires pour naviguer en toute sécurité dans ces environnements.
Nos capteurs INS utilisent la technologie des systèmes micro-électromécaniques (MEMS). Cela permet d'obtenir des capteurs plus petits, plus précis et plus efficaces sur le plan énergétique, ce qui améliore les performances globales de l'INS dans les voitures autonomes.
Systèmes de navigation inertielle pour les voitures autonomes
Nos systèmes de navigation inertielle sont conçus pour fournir la précision et la fiabilité inégalées nécessaires pour naviguer avec confiance dans des environnements complexes, tels que les canyons urbains.
Nous avons créé des solutions INS avancées qui s'intègrent de manière transparente à vos systèmes de véhicules autonomes, fournissant des données en temps réel qui garantissent un positionnement précis et un contrôle fluide et exact. Des rues urbaines aux terrains difficiles, nous donnons à votre technologie de voiture autonome les capacités de navigation robustes et performantes nécessaires pour réaliser un fonctionnement autonome sûr, fiable et efficace.

Découvrez nos solutions pour les voitures autonomes
Conduisez l'avenir de la mobilité autonome avec nous, où l'innovation rencontre la précision, et où chaque voyage est guidé avec une exactitude inégalée. Découvrez nos solutions pour la navigation des voitures autonomes.

Ellipse-D

Ekinox Micro

Ekinox-D
Brochure sur les applications autonomes
Recevez notre brochure instantanément dans votre boîte de réception !
Études de cas
Découvrez comment notre technologie inertielle remodèle le paysage des véhicules autonomes dans notre section d'études de cas. Ces exemples concrets montrent comment nos capteurs avancés permettent une navigation précise et des performances robustes. Nos solutions améliorent la sécurité dans les environnements urbains complexes. Elles garantissent une fonctionnalité optimale lorsque les signaux GNSS ne sont pas disponibles.

Recherche sur les ferries autonomes dans les voies navigables urbaines réelles
Navigation autonome des ferries
Comment Ellipse a aidé un bateau à énergie solaire à participer à la course de Monaco
Bateau à énergie solaire
Précis et sûr : système d'assistance modulaire pour excavatrices alimenté par Ellipse
Excavatrice industrielle


Ils parlent de nous
Écoutez directement les témoignages des innovateurs et des clients qui ont adopté notre technologie.
Leurs témoignages et leurs réussites illustrent l'impact significatif de nos capteurs dans les applications pratiques de véhicules autonomes.
Découvrez d'autres applications potentielles pour les véhicules autonomes
Les véhicules autonomes transforment les industries bien au-delà du transport. De l’agriculture et de la logistique à la construction et à la surveillance, les technologies de navigation avancées permettent des opérations plus intelligentes, plus sûres et plus efficaces. Découvrez le large éventail d’applications innovantes alimentées par l’autonomie.
Vous avez des questions ?
Trouvez des réponses aux questions les plus fréquentes sur les applications que nous présentons. Notre FAQ fournit des explications claires pour chaque application présentée. Elle aide les utilisateurs à comprendre les cas d'utilisation pratiques et les avantages. De plus, si vous ne trouvez pas les informations dont vous avez besoin, contactez-nous directement.
Comment fonctionnent les voitures autonomes ?
Les voitures autonomes sont des véhicules équipés de systèmes sophistiqués qui leur permettent de se déplacer et de se contrôler sans intervention humaine. Ces véhicules utilisent une combinaison de capteurs de conduite autonome et d'algorithmes pour percevoir leur environnement, prendre des décisions et effectuer des tâches de conduite autonome. L'objectif est d'atteindre une autonomie totale, où le véhicule peut gérer tous les aspects de la conduite de manière sûre et efficace.
Les voitures autonomes reposent sur un ensemble de technologies clés pour percevoir leur environnement. Ceux-ci inclus:
- GNSS (Global Navigation Satellite System) : pour obtenir les mises à jour en temps réel sur la position, la vitesse et la direction de la voiture autonome.
- INS (Inertial Navigation Systems) : pour maintenir la précision en cas de perte de signal GNSS. Il fournit des mises à jour en temps réel sur la position, la vitesse et la direction de la voiture autonome.
- LiDAR (Light Detection and Ranging) : utilisation de faisceaux laser pour créer une carte 3D détaillée de l'environnement du véhicule. Cette technologie aide la voiture à détecter et à mesurer les objets qui l'entourent, y compris les autres véhicules, les piétons et les panneaux de signalisation.
- Radar (Radio Detection and Ranging) : utilisation d'ondes radio pour détecter la vitesse, la distance et la direction des objets. Le radar est particulièrement utile dans des conditions météorologiques défavorables et pour détecter des objets à plus longue portée.
- Caméras : pour capturer des informations visuelles sur l'environnement du véhicule, notamment le marquage des voies, les feux de circulation et les panneaux de signalisation. Elles sont essentielles pour interpréter les signaux visuels complexes et prendre des décisions basées sur des données visuelles.
Quelle est la différence entre l'ADAS dans les voitures et les voitures autonomes ?
Les ADAS (systèmes avancés d'aide à la conduite) améliorent la sécurité de la conduite en offrant des fonctionnalités telles que le maintien de la trajectoire, le régulateur de vitesse adaptatif et le freinage automatique, mais nécessitent la supervision active du conducteur. En revanche, les voitures autonomes, équipées de systèmes de conduite autonome, visent à automatiser entièrement le fonctionnement du véhicule sans intervention humaine.
Alors que les ADAS aident les conducteurs en les assistant dans leurs tâches et en améliorant la sécurité, les voitures autonomes sont conçues pour gérer tous les aspects de la conduite autonome, de la navigation à la prise de décision, offrant ainsi un niveau d'automatisation (niveaux SAE) et de commodité plus élevé. Les caractéristiques ou fonctionnalités ADAS sont attribuées aux niveaux SAE inférieurs à 3 et les voitures autonomes en tant que telles correspondent au niveau minimum 4.
Comment fonctionne le GPS ?
Le GPS (Global Positioning System) repose sur une constellation de satellites, une synchronisation précise et la trilatération pour déterminer votre position partout sur Terre.
Voici l'explication claire la plus simple :
1 – Les satellites diffusent des signaux
Environ 30 satellites GPS sont en orbite autour de la Terre, chacun transmettant en continu :
– Sa position exacte dans l'espace
– L'heure exacte à laquelle le signal a été envoyé (à l'aide d'horloges atomiques)
Ces signaux se déplacent à la vitesse de la lumière.
2 – Votre récepteur mesure le temps de trajet
Un récepteur GPS (dans votre téléphone, drone, INS, etc.) capte les signaux de plusieurs satellites.
En mesurant le temps qu'il a fallu à chaque signal pour arriver, il calcule la distance :
distance = vitesse de la lumière × temps de trajet
3 – La trilatération calcule votre position
Pour trouver votre position, le récepteur utilise la trilatération (et non la triangulation) :
- Avec 1 satellite → vous pourriez être n'importe où sur une sphère
- Avec 2 satellites → les cercles se croisent
- Avec 3 satellites → deux points possibles
- Avec 4 satellites → votre position 3D exacte + correction d'horloge
Votre récepteur n'a pas d'horloge atomique, le 4ème satellite est donc nécessaire pour résoudre les erreurs de synchronisation.
4 – Les corrections améliorent la précision
Le GPS brut comporte des erreurs provenant de :
- L'atmosphère (ionosphère, troposphère)
- La dérive de l'horloge du satellite
- Les erreurs de prédiction d'orbite
- Réflexions multipath (signaux rebondissant sur les bâtiments)
Pour améliorer la précision :
- Le SBAS (par exemple, WAAS, EGNOS) fournit des corrections en temps réel
- Les techniques RTK et PPP corrigent les erreurs jusqu'au niveau centimétrique
- Le couplage INS (IMU + GPS) lisse et comble les lacunes lors de la perte de signal
6 – Sortie finale
Le récepteur combine toutes les données pour estimer :
- Latitude
- Longitude
- Altitude
- Vélocité
- Temps précis
Les récepteurs GPS modernes effectuent cette opération des dizaines, voire des centaines de fois par seconde.
Qu'est-ce qu'un INS ?
Un INS (Système de Navigation Inertielle) est une solution de navigation autonome qui détermine la position, l'orientation et la vitesse d'une plateforme en utilisant uniquement des capteurs inertiels—généralement :
- Accéléromètres (mesurent l'accélération linéaire)
- Gyroscopes (mesurent la rotation angulaire)
Comment ça marche ?
Les gyroscopes suivent la rotation de la plateforme (roulis, tangage, lacet). Les accéléromètres mesurent le mouvement le long de trois axes. Un filtre de navigation (généralement un filtre de Kalman) intègre ces mesures dans le temps pour calculer :
- Position (x, y, z)
- Vélocité
- Attitude (orientation)
Caractéristiques clés
- Entièrement autonome : aucun signal externe n'est nécessaire pour fonctionner
- Taux de mise à jour élevé : souvent des centaines ou des milliers de mesures par seconde
- Fonctionne dans n'importe quel environnement : fonctionne sous terre, sous l'eau, à l'intérieur et dans les environnements où le GPS est impossible
- La précision dépend de la qualité du capteur : allant des IMU grand public aux INS de qualité tactique et de navigation
Applications courantes
- Aérospatiale et défense : missiles, UAV, munitions téléopérées, véhicules blindés
- Marine : AUVs, USVs, navires, systèmes d'hydrographie
- Robotique terrestre : véhicules autonomes, SLAM, AGV
- Levés et cartographie : systèmes de cartographie mobile, LiDAR
- Industriel : stabilisation, suivi de mouvement
