自動運転車のナビゲーションの強化
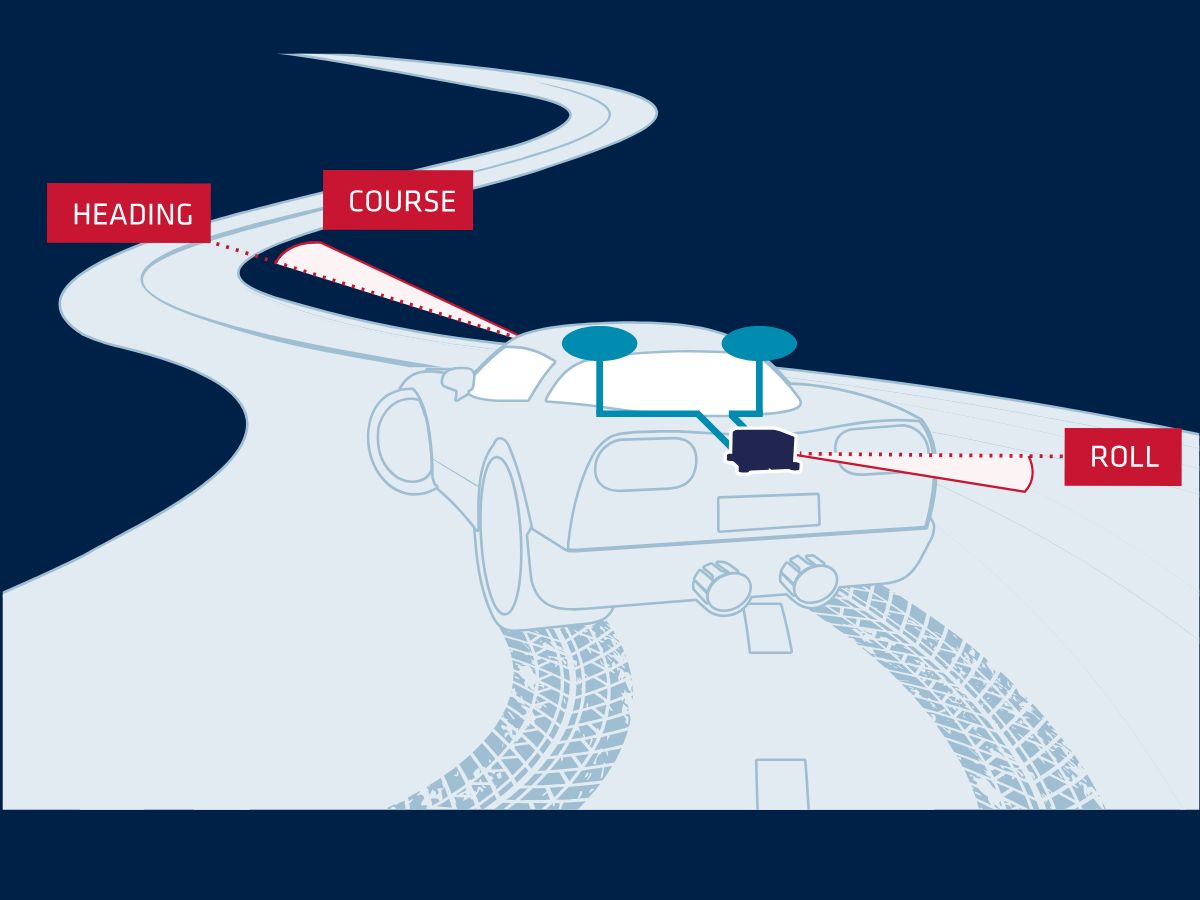
当社の慣性航法システム(INS)は、リアルタイムのロール、ピッチ、および方位を提供し、GNSS受信機と統合して、信号中断時でも精度を維持します。LiDARやカメラなど、追加の機器を正確に同期および安定化し、自動運転車アプリケーションに対応します。
さらに、INSを他のセンサーと統合することで、車両の環境を包括的に理解できます。さらに、この統合により、複雑で動的なシナリオのナビゲーションをより高い精度で実現できます。

自動運転車の安全性と信頼性の向上
自動運転車にとって最も困難な環境の一つは都市部です。ここでは、GNSS ビルGNSS 遮られたり、交通状況が急速に変化したりすることがあります。INS 、こうした環境を安全に走行するために必要な精度と信頼性をINS 。
INS 、Micro(MEMS)技術を採用しています。これにより、より小型で、より高精度、かつより省電力なセンサーを実現し、INS 総合的な性能を向上させています。
自動運転車向け慣性航法システム
当社の慣性航法システムは、都市部の峡谷のような複雑な環境を自信を持ってナビゲートするために必要な、比類のない精度と信頼性を提供するように設計されています。
当社は、お客様の自動運転車システムとシームレスに統合する高度なINSソリューションを作成し、正確なポジショニングとスムーズで正確な制御を保証するリアルタイムデータを提供します。都市部の道路から困難な地形まで、安全で信頼性が高く、効率的な自律運転を実現するために必要な、堅牢で高性能なナビゲーション機能で、お客様の自動運転車技術を強化します。

自動運転車向けの当社のソリューションをご覧ください
革新と精度が融合し、他に類を見ない精度であらゆる移動をガイドする。私たちと一緒に、自律移動体の未来を推進しませんか。自動運転車向けナビゲーションソリューションをご覧ください。

Ellipse-D

Ekinox Micro

Ekinox-D
自律アプリケーションのパンフレット
当社のパンフレットを今すぐ受信箱に!
事例紹介
ケーススタディのセクションで、当社の慣性技術が自動運転車の状況をどのように変えているかをご覧ください。これらの実際の例は、当社の高度なセンサーが正確なナビゲーションと堅牢なパフォーマンスをどのように実現するかを示しています。当社のソリューションは、複雑な都市環境での安全性を高めます。GNSS信号が利用できない場合でも、最適な機能が保証されます。






SBG Systemsについて
SBG Systemsの技術を採用したイノベーターやクライアントからの直接の声をお聞きください。
彼らの証言や成功事例は、SBG Systemsのセンサーが実際の自律走行車アプリケーションに与える大きな影響を示しています。
自律走行車向けのその他の潜在的なアプリケーションを見る
自律走行車は、輸送業界をはるかに超えて産業を変革しています。農業や物流から、建設や監視まで、高度なナビゲーション技術は、よりスマートで安全、かつ効率的なオペレーションを可能にしています。自律性によって強化された幅広い革新的なアプリケーションをご覧ください。
ご質問はありますか?
私たちが紹介するアプリケーションに関する最も一般的な質問への回答を見つけてください。当社のFAQは、各注目のアプリケーションについて明確な説明を提供します。ユーザーが実際の使用例と利点を理解するのに役立ちます。さらに、必要な情報が見つからない場合は、直接お問い合わせください。
自動運転車はどのように機能しますか?
自動運転車は、高度なシステムを搭載し、人間の介入なしに自律的にナビゲートおよび制御できる車両です。これらの車両は、自律走行センサーとアルゴリズムを組み合わせて使用し、環境を認識し、意思決定を行い、自動運転タスクを実行します。目標は、車両が運転のあらゆる側面を安全かつ効率的に処理できる完全な自律性を実現することです。
自動運転車は、周囲の状況を認識するために、以下のような主要技術を使用しています。
- GNSS (Global Navigation Satellite System):自動運転車の位置、速度、および方向に関するリアルタイムの更新を取得します。
- INS(慣性航法システム):GNSS信号が途絶えた場合に精度を維持します。自動運転車の位置、速度、方向に関するリアルタイムの更新を提供します。
- LiDAR(Light Detection and Ranging):レーザービームを使用して、車両の周囲の環境の詳細な3Dマップを作成します。この技術は、他の車両、歩行者、道路標識など、周囲の物体を検出および測定するのに役立ちます。
- レーダー(Radio Detection and Ranging):電波を使用して、物体の速度、距離、方向を検出します。レーダーは、悪天候下や、より長距離で物体を検出する場合に特に役立ちます。
- カメラ:車載環境に関する視覚情報(車線表示、交通信号、道路標識など)をキャプチャします。複雑な視覚的な合図を解釈し、視覚データに基づいて意思決定を行うために不可欠です。
自動車におけるADASと自動運転車の違いは何ですか?
ADAS(先進運転支援システム)は、車線維持、アダプティブクルーズコントロール、自動ブレーキなどの機能を提供することで運転の安全性を高めますが、ドライバーによる積極的な監視が必要です。対照的に、自動運転車は、自律運転システムを搭載し、人間の介入なしに車両の操作を完全に自動化することを目指しています。
ADASはタスクを支援し、安全性を向上させることでドライバーをサポートしますが、自動運転車は、ナビゲーションから意思決定まで、自動運転のあらゆる側面を処理するように設計されており、より高度な自動化(SAEレベル)と利便性を提供します。ADASの特性または機能はSAEレベル3未満に起因し、自動運転車は最小レベル4に対応します。
GPSの仕組み
GPS(全地球測位システム)は、衛星群、精密なタイミング、および三辺測量を利用して、地球上のどこでも位置を特定します。
最もわかりやすい説明は以下のとおりです:
1 – 衛星が信号を送信
約30個のGPS衛星が地球を周回しており、それぞれが以下の情報を継続的に送信しています:
– 宇宙空間における正確な位置
– 信号が送信された正確な時刻(原子時計を使用)
これらの信号は光の速度で伝わります。
2 – 受信機が伝搬時間を計測
GPS受信機(携帯電話、ドローン、INSなど)は、複数の衛星からの信号を受信します。
各信号の到達にかかった時間を測定することで、距離を計算します。
距離 = 光速 × 伝播時間
3 – 三辺測量で位置を計算
受信機が自分の位置を特定するために、三辺測量(三角測量ではない)を使用します。
- 1 つの衛星を使用 → 球体のどこにでもいる可能性があります
- 2 つの衛星を使用 → 円が交差する
- 3 つの衛星を使用 → 2 つの可能な点
- 4 つの衛星を使用 → 正確な 3D 位置 + 時計補正
受信機には原子時計が搭載されていないため、4つ目の衛星を使用してタイミング誤差を解決する必要があります。
4 – 補正により精度が向上
生のGPSには次の誤差があります:
- 大気 (電離層、対流圏)
- 衛星のクロックドリフト
- 軌道予測誤差
- マルチパス反射(建物から反射する信号)
精度を向上させるには:
- SBAS(例:WAAS、EGNOS)はリアルタイム補正を提供します。
- RTKおよびPPP技術は、誤差をセンチメートルレベルまで補正します。
- INS coupling (IMU + GPS) は、信号損失中のギャップを平滑化し、補完します。
6 – 最終出力
受信機はすべてのデータを組み合わせて以下を推定します。
- 緯度
- 経度
- 高度
- 速度
- 正確な時間
最新のGPS受信機は、これを1秒間に数十回から数百回行います。
INSとは?
INS(慣性航法システム)は、慣性センサーのみを使用してプラットフォームの位置、姿勢、速度を決定する自己完結型の航法ソリューションです—具体的には:
- 加速度計(直線加速度を測定)
- ジャイロスコープ(角回転を測定)
どのように機能しますか?
ジャイロスコープは、プラットフォームの回転(ロール、ピッチ、ヨー)を追跡します。加速度計は、3つの軸に沿った動きを測定します。ナビゲーションフィルター(通常はカルマンフィルター)は、これらの測定値を時間とともに統合して、以下を計算します。
- 位置 (x, y, z)
- 速度
- 姿勢(オリエンテーション)
主な特徴
- 完全自律型:動作に必要な外部信号はありません
- 高い更新レート:多くの場合、1秒あたり数百または数千の測定
- あらゆる環境で作動:地下、水中、屋内、およびGPSが利用できない環境で作動
- 精度はセンサーのグレードによって異なります。コンシューマーグレードの IMUから、戦術および航法グレードの INS まで
一般的な用途
- 航空宇宙&防衛:ミサイル、UAV、徘徊型兵器、装甲車両
- 海洋:AUV、USV、船舶、水路システム
- 陸上ロボティクス:自動運転車、SLAM、AGV
- 測量とマッピング:モバイルマッピングシステム、LiDAR
- 産業用:安定化、モーショントラッキング
