Aprimorando a navegação de carros autônomos
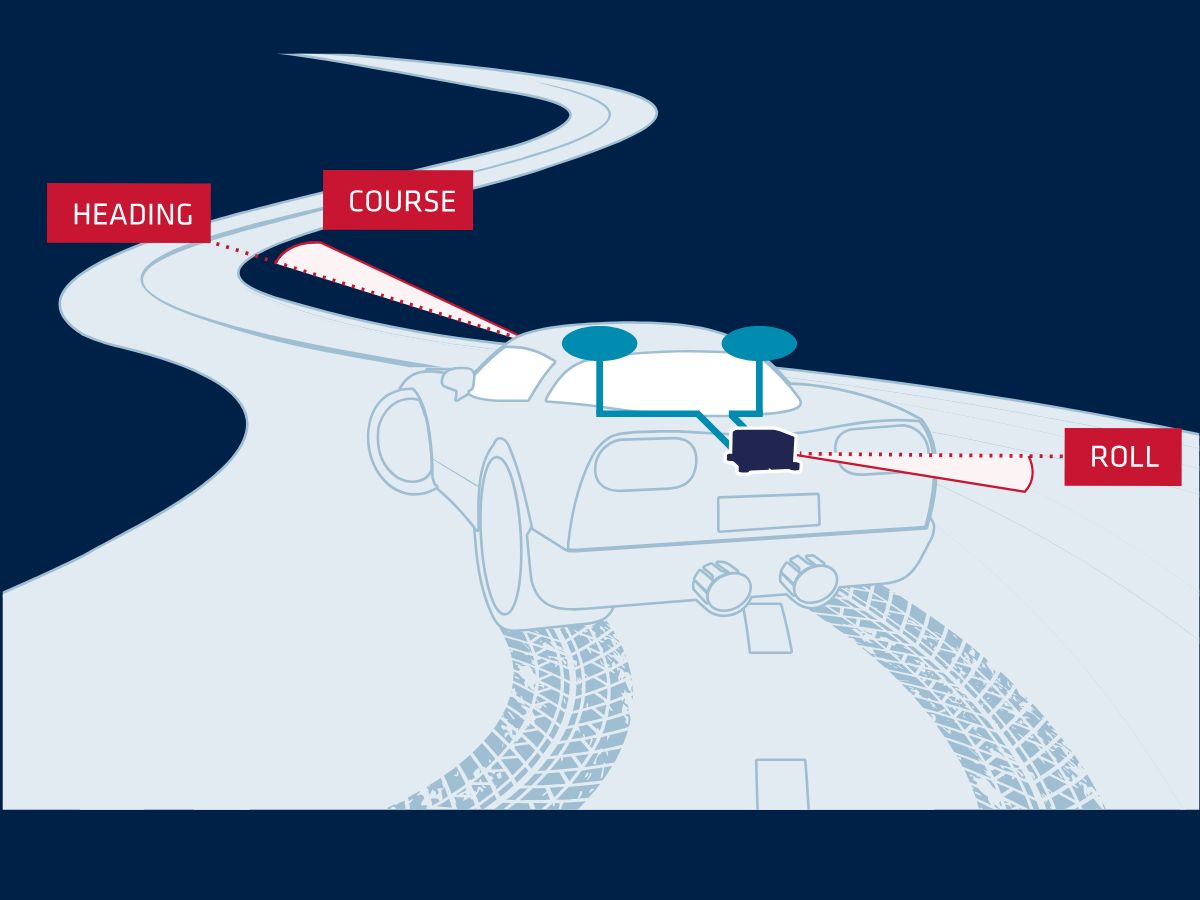
Nossos Sistemas de Navegação Inercial (INS) fornecem roll, pitch e heading em tempo real, integrados com um receptor GNSS para manter a precisão durante interrupções de sinal. Eles sincronizam e estabilizam com precisão equipamentos adicionais, como LiDAR ou câmeras, para aplicações de carros autônomos.
Além disso, a integração de um INS com outros sensores cria uma compreensão abrangente do ambiente do veículo. Além disso, essa integração permite a navegação em cenários complexos e dinâmicos com maior precisão.

Melhorando a segurança e a confiabilidade de veículos autônomos
Um dos ambientes mais desafiadores para carros autônomos são as áreas urbanas, onde GNSS podem ser obstruídos por prédios altos e as condições de tráfego podem mudar rapidamente. INS a precisão e a confiabilidade necessárias para navegar com segurança nesses ambientes.
Nossos INS utilizam a tecnologia de Sistemas Micro(MEMS). Isso permite a criação de sensores menores, mais precisos e com maior eficiência energética, aprimorando o desempenho geral do INS carros autônomos.
Sistemas de navegação inercial para carros autônomos
Nossos Sistemas de Navegação Inercial são projetados para fornecer a precisão e a confiabilidade incomparáveis necessárias para navegar em ambientes complexos, como cânions urbanos, com confiança.
Criamos soluções INS avançadas que se integram perfeitamente com seus sistemas de veículos autônomos, fornecendo dados em tempo real que garantem posicionamento preciso e controle suave e preciso. De ruas urbanas a terrenos desafiadores, capacitamos sua tecnologia de carro autônomo com os recursos de navegação robustos e de alto desempenho necessários para alcançar uma operação autônoma segura, confiável e eficiente.

Descubra nossas soluções para carros autônomos
Conduza o futuro da mobilidade autônoma conosco, onde a inovação encontra a precisão, e cada jornada é guiada com uma exatidão incomparável. Descubra nossas soluções para a navegação de carros autônomos.

Ellipse-D

Ekinox Micro

Ekinox-D
Brochura de aplicações autônomas
Receba nossa brochura instantaneamente em sua caixa de entrada!
Estudos de caso
Explore como nossa tecnologia inercial remodela o cenário dos veículos autônomos em nossa seção de estudos de caso. Esses exemplos do mundo real mostram como nossos sensores avançados permitem navegação precisa e desempenho robusto. Nossas soluções aumentam a segurança em ambientes urbanos complexos. Eles garantem a funcionalidade ideal quando os sinais GNSS não estão disponíveis.

Detecção de defeitos em trilhos da TREALIS com Apogee Navsight
Posicionamento de bondes e trens
Como a GapEOD promove levantamentos geofísicos mais seguros com Ellipse
Posicionamento de bondes e trens
Pesquisa sobre balsas autônomas em vias navegáveis urbanas reais
Navegação autônoma de balsas


Eles falam sobre nós
Ouça em primeira mão os inovadores e clientes que adotaram nossa tecnologia.
Seus depoimentos e histórias de sucesso ilustram o impacto significativo que nossos sensores têm em aplicações práticas de veículos autônomos.
Explore outras aplicações potenciais para veículos autônomos
Os veículos autônomos estão transformando indústrias muito além do transporte. Da agricultura e logística à construção e vigilância, as tecnologias de navegação avançadas estão permitindo operações mais inteligentes, seguras e eficientes. Explore a ampla gama de aplicações inovadoras impulsionadas pela autonomia.
Você tem perguntas?
Encontre respostas para as perguntas mais comuns sobre os aplicativos que apresentamos. Nosso FAQ fornece explicações claras para cada aplicativo em destaque. Ajuda os usuários a entender os casos de uso práticos e os benefícios. Além disso, se você não encontrar as informações de que precisa, entre em contato conosco diretamente.
Como funcionam os carros autônomos?
Carros autônomos são veículos equipados com sistemas sofisticados que lhes permitem navegar e se controlar sem intervenção humana. Esses veículos usam uma combinação de sensores de direção autônoma e algoritmos para perceber seu ambiente, tomar decisões e executar tarefas de direção autônoma. O objetivo é alcançar a autonomia total, onde o veículo pode lidar com todos os aspectos da direção com segurança e eficiência.
Carros autônomos dependem de uma variedade de tecnologias-chave para perceber o ambiente ao seu redor. Estas incluem:
- GNSS (Sistema Global de Navegação por Satélite): para obter atualizações em tempo real sobre a posição, velocidade e direção do carro autônomo.
- INS (Sistemas de Navegação Inercial): para manter a precisão em caso de falhas de sinal GNSS. Ele fornece atualizações em tempo real sobre a posição, velocidade e direção do carro autônomo.
- LiDAR (Light Detection and Ranging): uso de feixes de laser para criar um mapa 3D detalhado do ambiente do veículo. Essa tecnologia ajuda o carro a detectar e medir objetos ao seu redor, incluindo outros veículos, pedestres e placas de trânsito.
- Radar (Radio Detection and Ranging): uso de ondas de rádio para detectar a velocidade, distância e direção de objetos. O radar é particularmente útil em condições climáticas adversas e para detectar objetos em alcances mais longos.
- Câmeras: para capturar informações visuais sobre o ambiente do veículo, incluindo marcações de faixa, sinais de trânsito e placas de sinalização. São essenciais para interpretar sinais visuais complexos e tomar decisões com base em dados visuais.
Qual é a diferença entre ADAS em carros e carros autônomos?
O ADAS (Sistemas Avançados de Assistência ao Motorista) aprimora a segurança ao dirigir, fornecendo recursos como assistência de permanência na faixa, controle de cruzeiro adaptativo e frenagem automática, mas requer supervisão ativa do motorista. Em contraste, os carros autônomos, equipados com sistemas de direção autônoma, visam automatizar totalmente a operação do veículo sem intervenção humana.
Enquanto o ADAS auxilia os motoristas, auxiliando em tarefas e melhorando a segurança, os carros autônomos são projetados para lidar com todos os aspectos da direção autônoma, desde a navegação até a tomada de decisões, oferecendo um nível mais alto de automação (níveis SAE) e conveniência. As características ou recursos do ADAS são atribuídos aos níveis SAE abaixo de 3 e os carros autônomos, como tal, correspondem ao nível mínimo 4.
Como o GPS funciona?
O GPS (Global Positioning System) funciona utilizando uma constelação de satélites, sincronização precisa e trilateração para determinar sua posição em qualquer lugar da Terra.
Aqui está a explicação clara mais simples:
1 – Satélites transmitem sinais
Cerca de 30 satélites GPS orbitam a Terra, cada um transmitindo continuamente:
– Sua posição exata no espaço
– A hora exata em que o sinal foi enviado (usando relógios atômicos)
Esses sinais viajam na velocidade da luz.
2 – Seu receptor mede o tempo de viagem
Um receptor GPS (em seu telefone, drone, INS, etc.) capta sinais de vários satélites.
Ao medir quanto tempo cada sinal demorou para chegar, ele calcula a distância:
distância = velocidade da luz × tempo de percurso
3 – A trilateração calcula sua localização
Para encontrar sua posição, o receptor usa a trilateração (não triangulação):
- Com 1 satélite → você pode estar em qualquer lugar em uma esfera
- Com 2 satélites → os círculos se cruzam
- Com 3 satélites → dois pontos possíveis
- Com 4 satélites → sua posição 3D exata + correção do relógio
Seu receptor não tem um relógio atômico, então o 4º satélite é necessário para resolver erros de tempo.
4 – Correções melhoram a precisão
O GPS bruto tem erros de:
- Atmosfera (ionosfera, troposfera)
- Desvio do relógio do satélite
- Erros de previsão de órbita
- Reflexões de multicaminhos (sinais refletindo em edifícios)
Para melhorar a precisão:
- O SBAS (por exemplo, WAAS, EGNOS) fornece correções em tempo real
- As técnicas RTK e PPP corrigem erros até o nível do centímetro
- O acoplamento INS (IMU + GPS) suaviza e preenche lacunas durante a perda de sinal
6 – Saída final
O receptor combina todos os dados para estimar:
- Latitude
- Longitude
- Altitude
- Velocidade
- Tempo preciso
Os receptores GPS modernos fazem isso dezenas ou centenas de vezes por segundo.
O que é INS?
Um INS (Sistema de Navegação Inercial) é uma solução de navegação autônoma que determina a posição, orientação e velocidade de uma plataforma utilizando apenas sensores inerciais—tipicamente:
- Acelerômetros (medem a aceleração linear)
- Giroscópios (medem a rotação angular)
Como funciona?
Os giroscópios rastreiam como a plataforma gira (rolagem, arfagem, guinada). Os acelerômetros medem o movimento ao longo de três eixos. Um filtro de navegação (geralmente um filtro de Kalman) integra essas medições ao longo do tempo para calcular:
- Posição (x, y, z)
- Velocidade
- Atitude (orientação)
Principais Características
- Totalmente autônomo: Não necessita de sinais externos para operar
- Alta taxa de atualização: Frequentemente, centenas ou milhares de medições por segundo
- Opera em qualquer ambiente: Funciona no subsolo, embaixo d'água, em ambientes internos e em ambientes com GPS negado
- A precisão depende da qualidade do sensor: Varia de IMUs de nível de consumidor a INS de nível tático e de navegação
Aplicações Comuns
- Aeroespacial e defesa: mísseis, UAVs, munições de ataque, veículos blindados
- Marinha: AUVs, USVs, navios, sistemas de hidrografia
- Robótica terrestre: veículos autônomos, SLAM, AGVs
- Topografia e mapeamento: sistemas de mapeamento móvel, LiDAR
- Industrial: estabilização, rastreamento de movimento
