Mejora de la navegación de coches autónomos
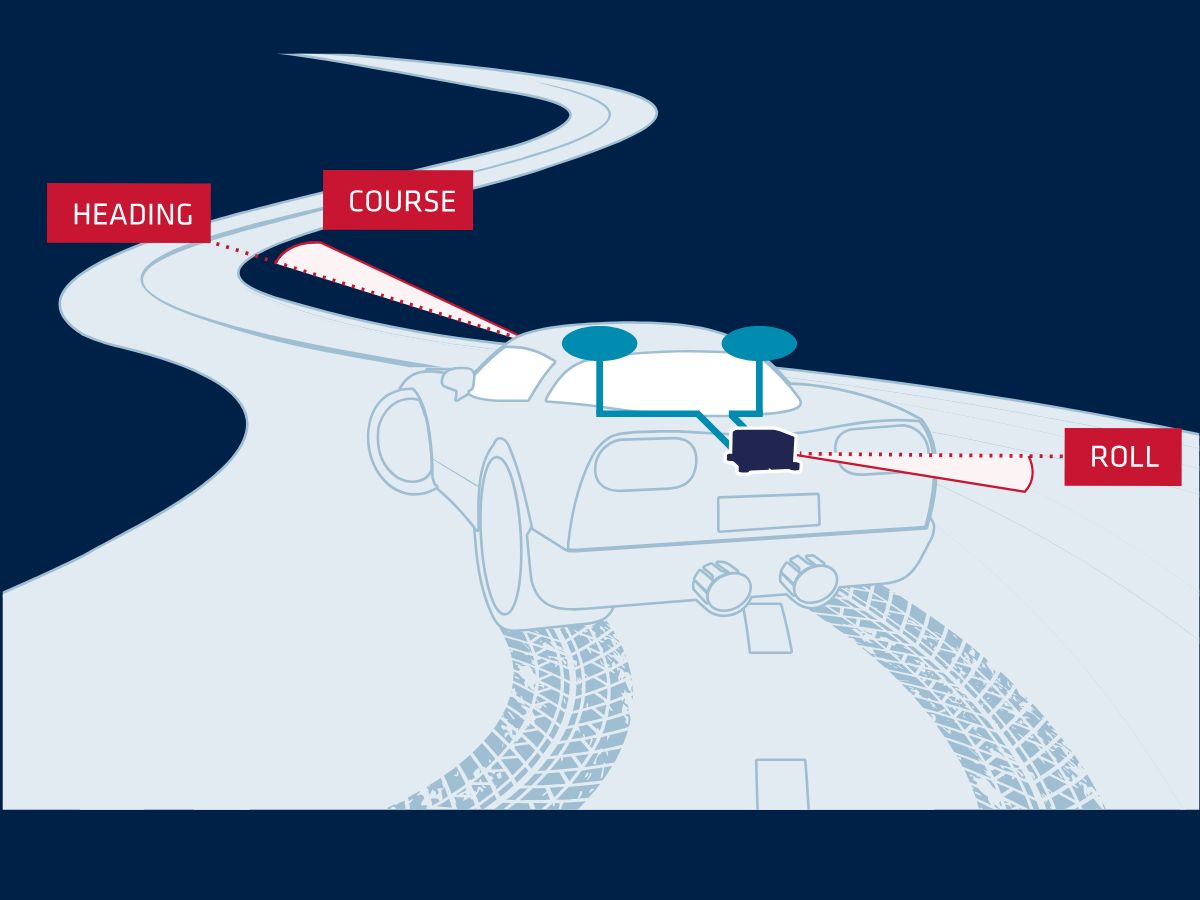
Nuestros sistemas de navegación inercial (INS) proporcionan balanceo, cabeceo y rumbo en tiempo real, integrados con un receptor GNSS para mantener la precisión durante las interrupciones de la señal. Sincronizan y estabilizan con precisión equipos adicionales, como LiDAR o cámaras, para aplicaciones de coches sin conductor.
Además, la integración de un INS con otros sensores crea una comprensión completa del entorno del vehículo. Además, esta integración permite la navegación de escenarios complejos y dinámicos con mayor precisión.

Mejora de la seguridad y la fiabilidad de los vehículos autónomos
Uno de los entornos más desafiantes para los coches autónomos son las zonas urbanas, donde las señales GNSS pueden verse obstruidas por edificios altos y las condiciones del tráfico pueden cambiar rápidamente. El INS proporciona la precisión y la fiabilidad necesarias para navegar por estos entornos de forma segura.
Nuestros sensores INS utilizan la tecnología de Sistemas Micro-Electro-Mecánicos (MEMS). Esto permite sensores más pequeños, más precisos y más eficientes energéticamente, lo que mejora el rendimiento general del INS en los coches autónomos.
Sistemas de navegación inercial para coches autónomos
Nuestros sistemas de navegación inercial están diseñados para proporcionar la precisión y fiabilidad inigualables necesarias para navegar con confianza en entornos complejos, como los cañones urbanos.
Creamos soluciones INS avanzadas que se integran a la perfección con los sistemas de vehículos autónomos, ofreciendo datos en tiempo real que garantizan un posicionamiento preciso y un control suave y exacto. Desde calles urbanas hasta terrenos difíciles, potenciamos la tecnología de su coche autónomo con las capacidades de navegación robustas y de alto rendimiento necesarias para lograr un funcionamiento autónomo seguro, fiable y eficiente.

Descubra nuestras soluciones para coches autónomos
Impulse el futuro de la movilidad autónoma con nosotros, donde la innovación se une a la precisión y cada viaje se guía con una exactitud incomparable. Descubra nuestras soluciones para la navegación de coches autónomos.

Ellipse-D

Ekinox Micro

Ekinox-D
Folleto de aplicaciones autónomas
¡Reciba nuestro folleto al instante en su bandeja de entrada!
Casos prácticos
Explore cómo nuestra tecnología inercial transforma el panorama de los vehículos autónomos en nuestra sección de casos prácticos. Estos ejemplos del mundo real muestran cómo nuestros sensores avanzados permiten una navegación precisa y un rendimiento robusto. Nuestras soluciones mejoran la seguridad en entornos urbanos complejos. Garantizan una funcionalidad óptima cuando las señales GNSS no están disponibles.

Cómo GapEOD mejora la seguridad de los estudios geofísicos con Ellipse
Posicionamiento de tranvías y trenes
Investigación sobre transbordadores autónomos en vías navegables urbanas reales
Navegación autónoma de transbordadores
Cómo Ellipse ayudó a un barco propulsado por energía solar a competir en Mónaco
Barco que funciona con energía solar


Hablan de nosotros
Escuche de primera mano a los innovadores y clientes que han adoptado nuestra tecnología.
Sus testimonios e historias de éxito ilustran el importante impacto que tienen nuestros sensores en aplicaciones prácticas de vehículos autónomos.
Explore otras aplicaciones potenciales para vehículos autónomos
Los vehículos autónomos están transformando industrias mucho más allá del transporte. Desde la agricultura y la logística hasta la construcción y la vigilancia, las tecnologías de navegación avanzadas están permitiendo operaciones más inteligentes, seguras y eficientes. Explore la amplia gama de aplicaciones innovadoras impulsadas por la autonomía.
¿Tiene alguna pregunta?
Encuentre respuestas a las preguntas más comunes sobre las aplicaciones que mostramos. Nuestras preguntas frecuentes ofrecen explicaciones claras para cada aplicación destacada. Ayuda a los usuarios a comprender los casos de uso prácticos y los beneficios. Además, si no encuentra la información que necesita, póngase en contacto con nosotros directamente.
¿Cómo funcionan los coches autónomos?
Los coches autónomos son vehículos equipados con sistemas sofisticados que les permiten navegar y controlarse sin intervención humana. Estos vehículos utilizan una combinación de sensores de conducción autónoma y algoritmos para percibir su entorno, tomar decisiones y realizar tareas de conducción autónoma. El objetivo es lograr una autonomía total, en la que el vehículo pueda gestionar todos los aspectos de la conducción de forma segura y eficiente.
Los coches autónomos dependen de una serie de tecnologías clave para percibir su entorno. Estas incluyen:
- GNSS (Sistema Global de Navegación por Satélite): para obtener las actualizaciones en tiempo real de la posición, velocidad y dirección del coche autónomo.
- INS (Sistemas de Navegación Inercial): para mantener la precisión en caso de interrupciones de la señal GNSS. Proporciona actualizaciones en tiempo real de la posición, velocidad y dirección del coche autónomo.
- LiDAR (Light Detection and Ranging): uso de haces de láser para crear un mapa 3D detallado del entorno del vehículo. Esta tecnología ayuda al coche a detectar y medir objetos a su alrededor, incluyendo otros vehículos, peatones y señales de tráfico.
- Radar (Radio Detection and Ranging): uso de ondas de radio para detectar la velocidad, la distancia y la dirección de los objetos. El radar es particularmente útil en condiciones climáticas adversas y para detectar objetos a mayor distancia.
- Cámaras: para capturar información visual sobre el entorno del vehículo, incluyendo las marcas de los carriles, las señales de tráfico y las señales de carretera. Son esenciales para interpretar las señales visuales complejas y tomar decisiones basadas en los datos visuales.
¿Cuál es la diferencia entre los ADAS en los coches y los coches autónomos?
Los ADAS (Sistemas Avanzados de Asistencia al Conductor) mejoran la seguridad en la conducción al proporcionar funciones como el mantenimiento de carril, el control de crucero adaptativo y el frenado automático, pero requieren la supervisión activa del conductor. En cambio, los coches autónomos, equipados con sistemas de conducción autónoma, pretenden automatizar por completo el funcionamiento del vehículo sin intervención humana.
Mientras que los ADAS ayudan a los conductores asistiendo en las tareas y mejorando la seguridad, los coches autónomos están diseñados para gestionar todos los aspectos de la conducción autónoma, desde la navegación hasta la toma de decisiones, ofreciendo un mayor nivel de automatización (niveles SAE) y comodidad. Las características o funciones de los ADAS se atribuyen a los niveles SAE inferiores a 3 y los coches autónomos como tales corresponden al nivel 4 como mínimo.
¿Cómo funciona el GPS?
El GPS (Sistema de Posicionamiento Global) funciona mediante el uso de una constelación de satélites, una sincronización precisa y la trilateración para determinar su posición en cualquier lugar de la Tierra.
Aquí tiene la explicación más sencilla y clara:
1 – Los satélites emiten señales
Aproximadamente 30 satélites GPS orbitan la Tierra, cada uno transmitiendo continuamente:
– Su posición exacta en el espacio
– La hora exacta en que se envió la señal (utilizando relojes atómicos)
Estas señales viajan a la velocidad de la luz.
2 – Su receptor mide el tiempo de viaje
Un receptor GPS (en su teléfono, dron, INS, etc.) capta señales de múltiples satélites.
Al medir el tiempo que tardó en llegar cada señal, calcula la distancia:
distancia = velocidad de la luz × tiempo de viaje
3 – La trilateración calcula su ubicación
Para encontrar su posición, el receptor utiliza la trilateración (no la triangulación):
- Con 1 satélite → podría estar en cualquier punto de una esfera
- Con 2 satélites → los círculos se intersecan
- Con 3 satélites → dos puntos posibles
- Con 4 satélites → su posición 3D exacta + corrección del reloj
Su receptor no dispone de un reloj atómico, por lo que se necesita el cuarto satélite para corregir los errores de sincronización.
4 – Las correcciones mejoran la precisión
El GPS sin procesar presenta errores de:
- Atmósfera (ionosfera, troposfera)
- Deriva del reloj del satélite
- Errores de predicción de órbita
- Reflexiones multitrayecto (señales rebotando en edificios)
Para mejorar la precisión:
- SBAS (p. ej., WAAS, EGNOS) proporciona correcciones en tiempo real
- Las técnicas RTK y PPP corrigen errores hasta el nivel centimétrico
- Acoplamiento INS (IMU + GPS) suaviza y cubre las interrupciones durante la pérdida de señal
6 – Salida final
El receptor combina todos los datos para estimar:
- Latitud
- Longitud
- Altitud
- Velocidad
- Hora precisa
Los receptores GPS modernos realizan esto docenas o cientos de veces por segundo.
¿Qué es un INS?
Un INS (Sistema de Navegación Inercial) es una solución de navegación autónoma que determina la posición, orientación y velocidad de una plataforma utilizando únicamente sensores inerciales, típicamente:
- Acelerómetros (miden la aceleración lineal)
- Giróscopos (miden la rotación angular)
¿Cómo funciona?
Los giróscopos rastrean cómo gira la plataforma (balanceo, cabeceo, guiñada). Los acelerómetros miden el movimiento a lo largo de tres ejes. Un filtro de navegación (normalmente un filtro de Kalman) integra estas mediciones a lo largo del tiempo para calcular:
- Posición (x, y, z)
- Velocidad
- Actitud (orientación)
Características clave
- Totalmente autónomo: No requiere señales externas para funcionar
- Alta tasa de actualización: A menudo, cientos o miles de mediciones por segundo
- Opera en cualquier entorno: Funciona bajo tierra, bajo el agua, en interiores y en entornos sin señal GPS
- La precisión depende del grado del sensor: Varía desde IMU de grado de consumo hasta INS de grado táctico y de navegación
Aplicaciones comunes
- Aeroespacial y defensa: misiles, UAVs, municiones merodeadoras, vehículos blindados
- Marina: AUVs, USVs, buques, sistemas de hidrografía
- Robótica terrestre: vehículos autónomos, SLAM, AGVs
- Topografía y cartografía: sistemas de cartografía móvil, LiDAR
- Industrial: estabilización, seguimiento de movimiento
