
In questo primo articolo della nostra serie “Mastering Accuracy”, esploreremo i sistemi globali di navigazione satellitare (GNSS) e le loro accuratezze stand-alone tenendo conto del GNSS e delle loro fonti di errore
Cos'è un sistema GNSS?
I sistemi di posizionamento satellitare, come il GPS, sono diventati onnipresenti, guidandoci nei nostri viaggi in auto e nei nostri trekking. Svolgono anche un ruolo fondamentale in varie applicazioni diverse come veicoli autonomi, agricoltura e rilevamento.
Tuttavia, è importante passare dal termine “GPS” al più inclusivo “GNSS” (Global Navigation Satellite System), che comprende tutte le costellazioni satellitari oltre al solo GPS.
Sono operative quattro costellazioni satellitari globali (GPS, GLONASS, GALILEO, BEIDOU). Inoltre, ci sono costellazioni supplementari che servono regioni locali, come l'IRNSS dell'India, o che integrano quelle globali, come il QZSS del Giappone.
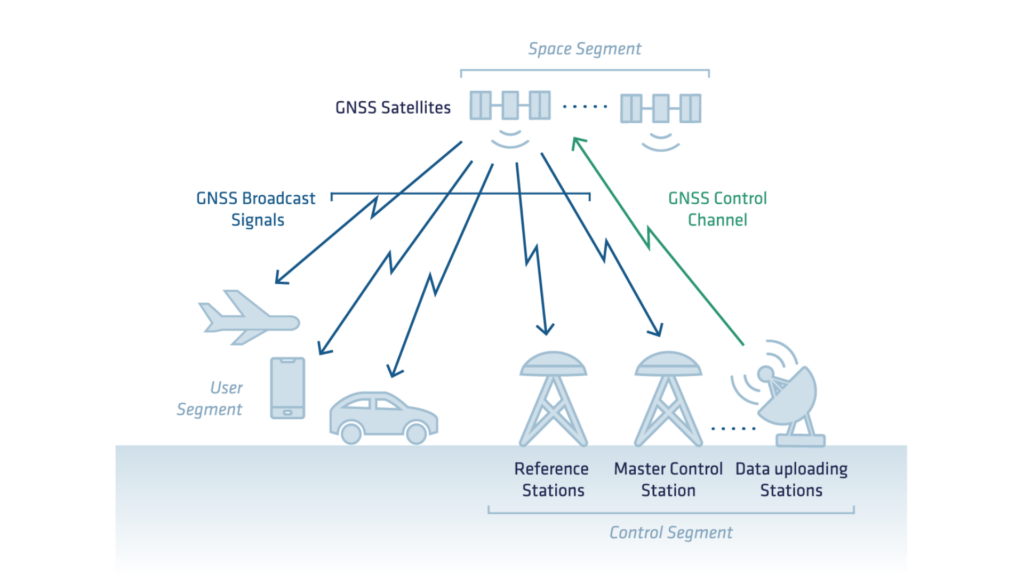
Oltre ai satelliti, un sistema GNSS comprende altri segmenti essenziali:
- Il segmento satellitare, che comprende la costellazione di satelliti.
- Il segmento di controllo, composto da stazioni di controllo a terra e apparecchiature, è responsabile del monitoraggio delle costellazioni, della determinazione della posizione dei satelliti e della garanzia del loro funzionamento continuo e corretto.
- Il segmento utente, che coinvolge le apparecchiature utilizzate per calcolare una posizione in base ai segnali ricevuti dai satelliti.
Principio fondamentale del GNSS: Trilaterazione
Il GNSS determina la posizione e l'ora di un ricevitore tramite trilaterazione, utilizzando i segnali di più satelliti.
Per calcolare una posizione, il sistema deve risolvere quattro variabili: latitudine, longitudine, altitudine e tempo. Questo processo richiede almeno quattro satelliti, sebbene satelliti aggiuntivi migliorino la precisione e l'affidabilità.
L'immagine seguente illustra il funzionamento della trilaterazione. Ogni satellite definisce una sfera attorno a sé, che rappresenta le possibili distanze dal ricevitore.
Un secondo satellite restringe le possibili soluzioni all'intersezione di queste due sfere. Un terzo satellite affina ulteriormente la soluzione, consentendo al sistema di individuare una singola posizione. Nelle applicazioni reali, il sistema deve anche tenere conto del tempo, il che rende necessario un quarto satellite.
Segnale emesso dai satelliti
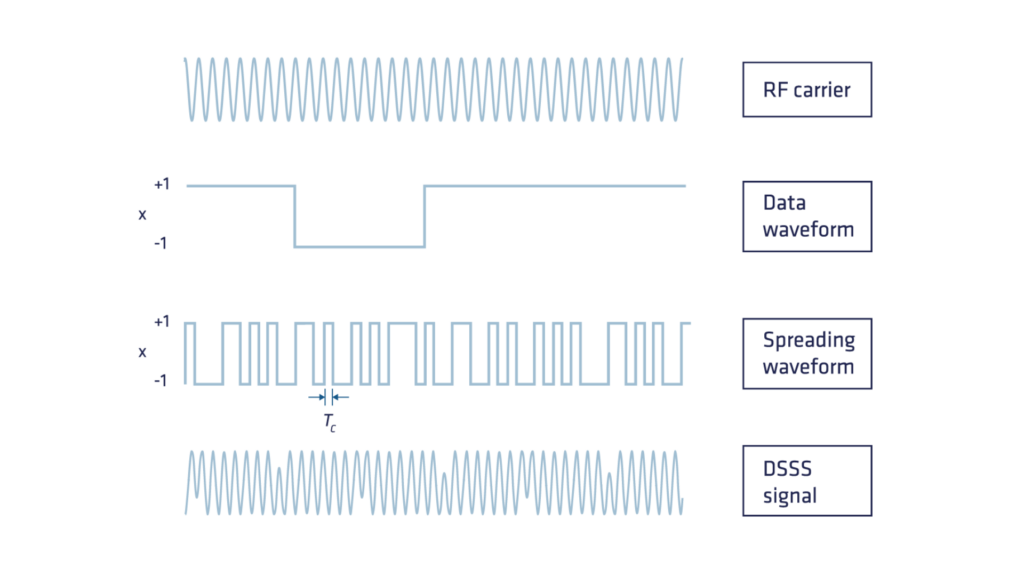
I satelliti GNSS trasmettono segnali attraverso varie bande di frequenza come L1, L2, L5, tra le altre. Ci sono tre componenti base dei segnali GNSS:
- Dati di navigazione (bassa frequenza): calcolati dal segmento di controllo, questi dati includono informazioni essenziali come i dati effemeridi (parametri orbitali kepleriani necessari per calcolare le posizioni dei satelliti), i dati di correzione dell'orologio e le informazioni supplementari. Caricati sul satellite e trasmessi globalmente ai ricevitori GNSS.
- Codice di rumore pseudocasuale o codice PRN: Ogni satellite trasmette un codice di rumore pseudocasuale (PRN) unico, una sequenza deterministica ad alta frequenza di 0 e 1 progettata con un pattern prevedibile in modo che il ricevitore possa replicarlo. Il vantaggio chiave dell'aggiunta del codice PRN è che consente a più satelliti di trasmettere segnali sulla stessa frequenza contemporaneamente e di essere riconoscibili dal ricevitore. Questa tecnica, nota come Code Division Multiple Access (CDMA), assegna a ciascun satellite un codice pseudocasuale unico. Solo Glonass utilizza FDMA (Frequency Division Multiple Access) dove ogni satellite ha una frequenza leggermente diversa.
- Onda portante RF: un segnale sinusoidale originariamente progettato per trasportare il segnale combinato dei dati di navigazione e del codice PRN. Vedremo più avanti come questo componente si evolve per diventare il fondamento del segnale GNSS, consentendo un'accuratezza di posizionamento a livello di centimetro.
Misurazione della distanza dal satellite: codice e fase portante
In origine, il sistema GPS è stato progettato in modo che il ricevitore utilizzasse una replica del codice PRN e tecniche di autocorrelazione per calcolare la distanza satellite-ricevitore con una precisione sub-metrica. Tuttavia, l'onda portante, inizialmente destinata alla trasmissione del codice PRN, si è rivelata una risorsa preziosa.
La misurazione della fase della portante, sebbene più precisa, ha introdotto ambiguità nel determinare la distanza tra il satellite e il ricevitore. Un'ulteriore esplorazione di entrambe le misurazioni è presentata di seguito.
Calcolo della distanza satellite-ricevitore con codice PRN
Il ricevitore GNSS utilizza un processo chiamato “Delay Lock Loop” per determinare il ritardo temporale tra il codice trasmesso e il codice ricevuto. Questo ritardo temporale, che corrisponde al tempo di propagazione del segnale, viene poi convertito in una distanza moltiplicandolo per la velocità della luce.
Tuttavia, a causa degli orologi non sincronizzati del ricevitore e del satellite, la distanza risultante è chiamata pseudorange. Oltre all'errore di sincronizzazione dell'orologio, la pseudorange è influenzata da diversi altri errori legati all'ambiente di propagazione (atmosfera, hardware, ecc.), che verranno discussi più avanti nell'articolo.
Miglioramento della distanza satellite-ricevitore: Misurazione della fase portante
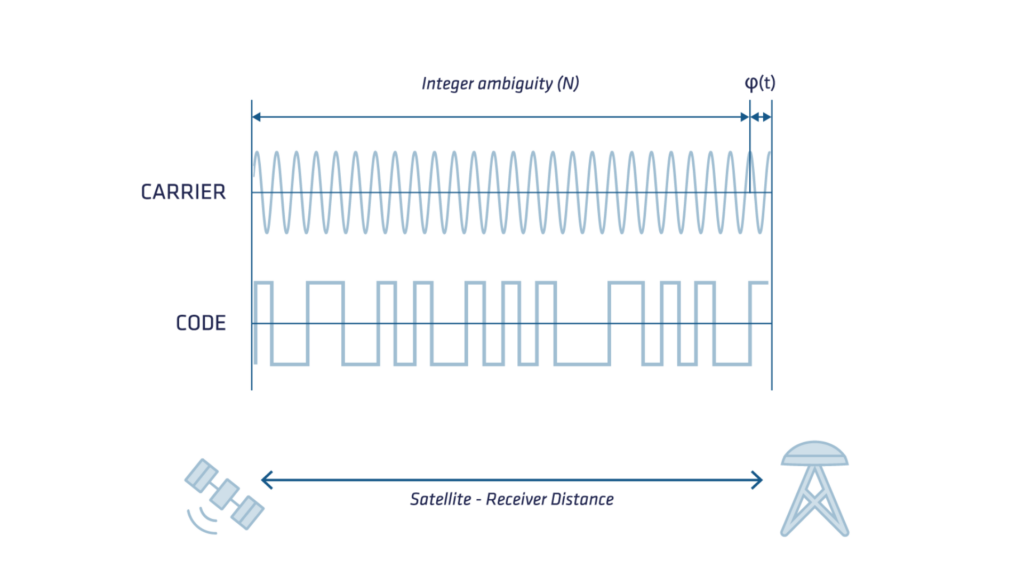
La distanza tra il satellite e il ricevitore può essere determinata anche contando il numero di cicli di fase trascorsi tra l'emissione e la ricezione del segnale e moltiplicandolo per la lunghezza d'onda della portante.
Questa misurazione è due ordini di grandezza più precisa rispetto al codice, ma un numero intero sconosciuto e costante di cicli (noto anche come ambiguità) ne influenza l'accuratezza assoluta. Per determinare l'evoluzione precisa della fase della portante, il ricevitore GNSS accumula gli spostamenti di frequenza Doppler nell'onda portante, causati dal movimento relativo satellite-ricevitore.
In caso di interruzione del segnale, questo processo di accumulazione non può tenere conto del movimento effettivo e si possono osservare salti improvvisi nella misurazione, noti anche come "cycle slips".
La corretta gestione dei cycle slips e dell'ambiguità è impegnativa e sono aspetti chiave delle tecniche di posizionamento di precisione come il Real Time Kinematics (RTK) e il Precise Point Positioning (PPP).
Il seguente diagramma mostra l'onda portante del segnale, il codice e le loro rispettive risoluzioni.
Fonti di errori nel GNSS
L'accuratezza iniziale del GPS per il pubblico generale (non militare) era di circa 100 m. A seguito dei molteplici anni di evoluzioni (rimozione della disponibilità selettiva, implementazione di nuove costellazioni e sistemi SBAS, nuovi satelliti e nuove frequenze), l'accuratezza del GNSS stand-alone è ora compresa tra 5 m per i ricevitori GNSS entry level, fino a 1 m per quelli di fascia alta.
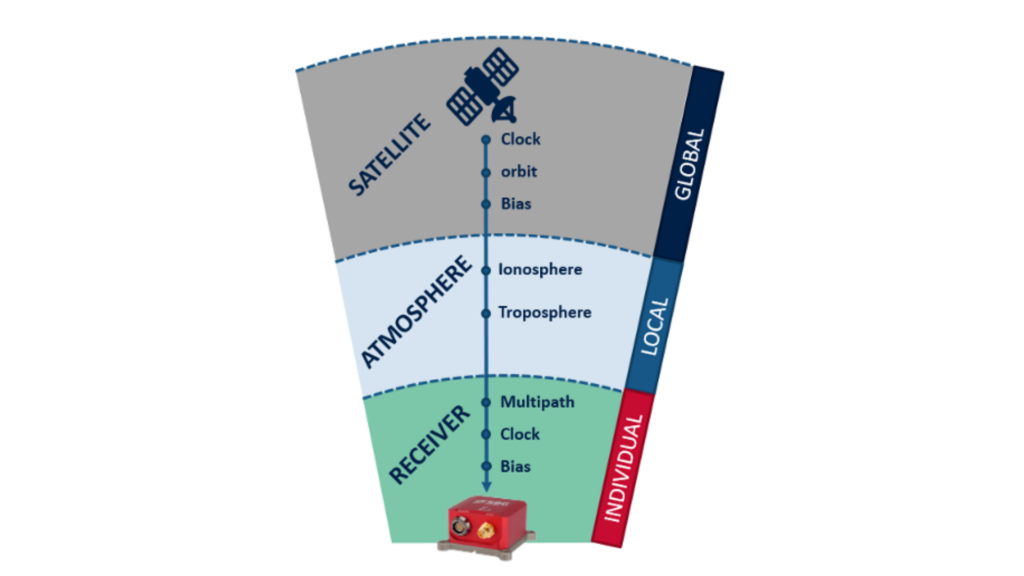
Errori del satellite
- Errori dell'orologio: sebbene gli orologi atomici sui satelliti GNSS siano altamente precisi, subiscono una leggera deriva. Sfortunatamente, anche una leggera deviazione nell'orologio del satellite può portare a una notevole discrepanza nella posizione calcolata dal ricevitore. Ad esempio, soli 10 nanosecondi di errore dell'orologio si traducono in un errore di posizione di 3 metri sulla misurazione della distanza!
- Errori orbitali: sebbene i satelliti GNSS seguano orbite altamente precise e ben documentate, queste orbite subiscono piccole variazioni, simili agli orologi dei satelliti. Come le imprecisioni dell'orologio, anche un leggero cambiamento nell'orbita del satellite può causare un errore significativo nella posizione calcolata. Gli errori residui nell'orbita persistono, contribuendo a potenziali errori di posizione fino a ±2,5 metri.
Errori atmosferici
- Ritardo ionosferico: Situata tra i 50 e i 1.000 km sopra la Terra, la ionosfera contiene ioni carichi che influenzano la trasmissione dei segnali radio, causando errori di posizione (tipicamente ±5 metri, superiori durante l'aumento dell'attività ionosferica). Il ritardo ionosferico varia in base all'attività solare, all'ora del giorno, alla stagione e alla posizione, rendendo le previsioni difficili.
- Ritardo troposferico: Lo strato atmosferico immediato della Terra, la troposfera, vede variazioni nel ritardo dovute a cambiamenti di umidità, temperatura e pressione atmosferica.
Errori del ricevitore
L'orologio interno del ricevitore, che è meno preciso rispetto all'orologio atomico del satellite, insieme ad altri errori hardware e software, aggiunge rumore e bias alle misurazioni.
| Ritardo | Origine | Magnitudo |
|---|---|---|
| Errore di posizione | Satellite | 5m |
| Clock Offset | Satellite | 0-300 km |
| Ritardo strumentale | Satellite | 1-10 m |
| Effetto relativistico | Satellite | 10 m |
| Ritardo ionosferico | Tragitto (50-1000 km) | 2-50 m |
| Ritardo troposferico | Tragitto (0-12 km) | 2-10 m |
| Ritardo strumentale | Ricevitore | 1-10 m |
| Clock Offset | Ricevitore | 0-300 km |
Per garantire una navigazione ottimale, il sistema deve tenere conto di questi errori, mitigarli utilizzando un modello di errore specifico o stimarli tramite il filtro di navigazione.
Il calcolo della posizione dovrebbe anche considerare molti altri termini di errore non elencati in questo articolo, come gli effetti di marea e gli effetti relativistici.
Diverse fonti di errore influenzano le prestazioni della tecnologia GNSS, che fornisce posizionamento, navigazione e temporizzazione altamente precisi.
Fattori come i ritardi atmosferici, gli errori dell'orologio satellitare e delle effemeridi, l'interferenza multipath e il rumore del ricevitore possono degradare la precisione. Sebbene le moderne tecniche di correzione (GNSS differenziale, RTK e PPP) aiutino a mitigare il GNSS e le sue fonti di errore, comprenderne le origini rimane essenziale per ottimizzare le prestazioni del GNSS.
Man mano che i progressi nell'elaborazione del segnale, nella fusione di sensori e nell'apprendimento automatico continuano ad evolversi, i sistemi GNSS diventeranno ancora più robusti, garantendo una maggiore affidabilità in diverse applicazioni.
