Ulepszanie nawigacji samochodów autonomicznych
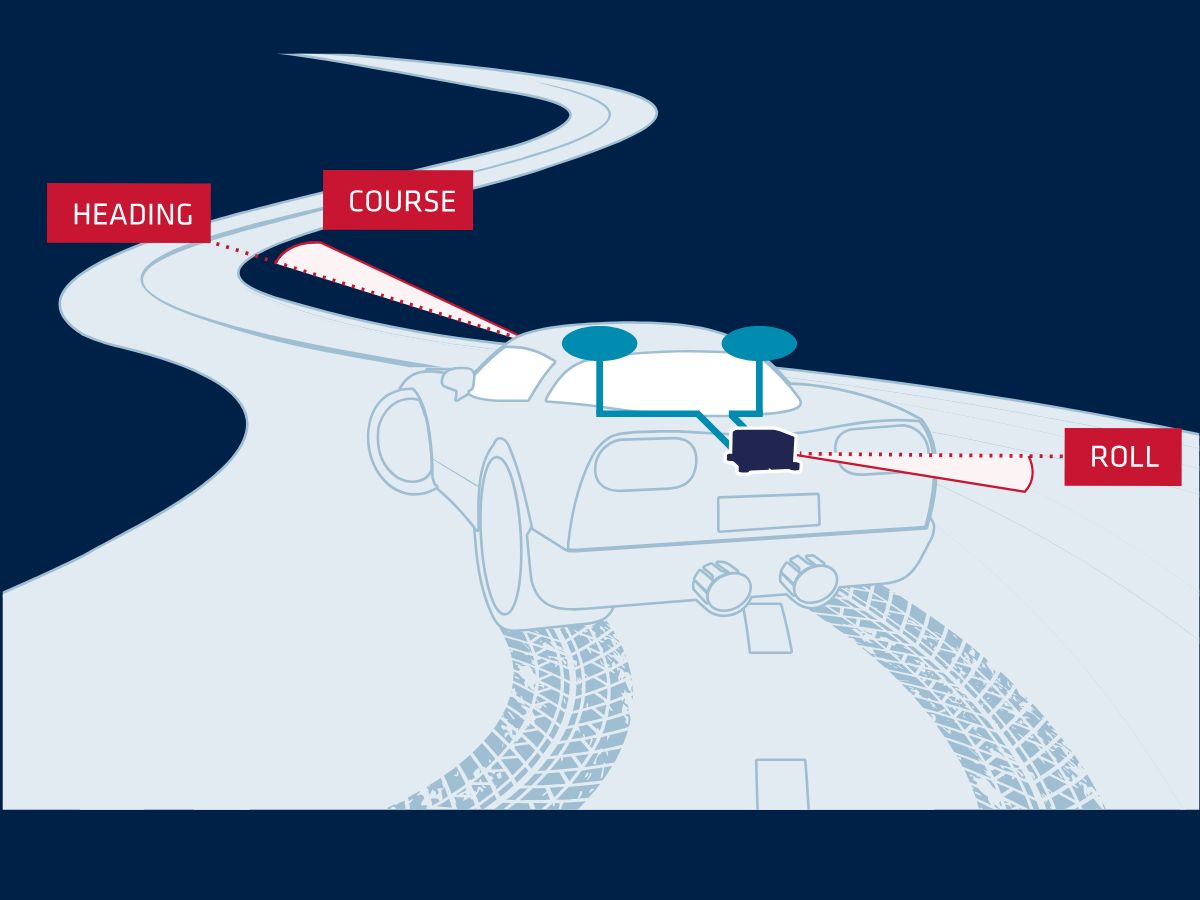
Nasze systemy nawigacji inercyjnej (INS) dostarczają w czasie rzeczywistym informacje o roll, pitch i heading, zintegrowane z odbiornikiem GNSS w celu utrzymania dokładności podczas przerw w sygnale. Precyzyjnie synchronizują i stabilizują dodatkowe wyposażenie, takie jak LiDAR lub kamery, do zastosowań w samochodach autonomicznych.
Ponadto integracja INS z innymi czujnikami zapewnia kompleksowe zrozumienie otoczenia pojazdu. Co więcej, ta integracja umożliwia nawigację w złożonych i dynamicznych scenariuszach z większą precyzją.

Poprawa bezpieczeństwa i niezawodności pojazdów autonomicznych
Jednym z najtrudniejszych środowisk dla samochodów autonomicznych są obszary miejskie, gdzie GNSS mogą być zakłócane przez wysokie budynki, a warunki ruchu mogą się gwałtownie zmieniać. INS dokładność i niezawodność niezbędne do bezpiecznej nawigacji w takich środowiskach.
Nasze INS wykorzystują technologię Micro układów (MEMS). Pozwala to na tworzenie mniejszych, dokładniejszych i bardziej energooszczędnych czujników, co poprawia ogólną wydajność INS samochodach autonomicznych.
Inercyjne systemy nawigacyjne dla samochodów autonomicznych
Nasze systemy nawigacji inercyjnej są zaprojektowane, aby zapewnić niezrównaną dokładność i niezawodność wymaganą do pewnego poruszania się w złożonych środowiskach, takich jak wąwozy miejskie.
Stworzyliśmy zaawansowane rozwiązania INS, które bezproblemowo integrują się z systemami pojazdów autonomicznych, dostarczając dane w czasie rzeczywistym, które zapewniają precyzyjne pozycjonowanie i płynne, dokładne sterowanie. Od ulic miejskich po trudne tereny, wspieramy technologię samochodów autonomicznych dzięki solidnym, wysokowydajnym możliwościom nawigacyjnym potrzebnym do osiągnięcia bezpiecznej, niezawodnej i wydajnej autonomicznej pracy.

Odkryj nasze rozwiązania dla samochodów autonomicznych
Kieruj przyszłością autonomicznej mobilności z nami, gdzie innowacja spotyka się z precyzją, a każda podróż jest prowadzona z niezrównaną dokładnością. Odkryj nasze rozwiązania dla nawigacji samochodów autonomicznych.

Ellipse-D

Ekinox Micro

Ekinox-D
Broszura o zastosowaniach autonomicznych
Odbierz naszą broszurę natychmiast na swoją skrzynkę odbiorczą!
Studia przypadków
Zapoznaj się z tym, jak nasza technologia inercyjna zmienia krajobraz pojazdów autonomicznych w naszej sekcji studiów przypadków. Te rzeczywiste przykłady pokazują, jak nasze zaawansowane czujniki umożliwiają precyzyjną nawigację i solidną wydajność. Nasze rozwiązania zwiększają bezpieczeństwo w złożonych środowiskach miejskich. Zapewniają optymalną funkcjonalność, gdy sygnały GNSS są niedostępne.
Ellipse używany w nawigacji pojazdów autonomicznych
Nawigacja autonomiczna
Wykrywanie uszkodzeń szyn przez firmę TREALIS przy użyciuNavsight Apogee Navsight
Pozycjonowanie tramwajów i pociągów
W jaki sposób GapEOD zapewnia większe bezpieczeństwo badań geofizycznych dzięki rozwiąz Ellipse
Pozycjonowanie tramwajów i pociągów
Badania nad autonomicznymi promami na rzeczywistych miejskich drogach wodnych
Autonomiczna żegluga promowa


Oni o nas mówią
Posłuchaj z pierwszej ręki od innowatorów i klientów, którzy przyjęli naszą technologię.
Ich referencje i historie sukcesu ilustrują znaczący wpływ, jaki nasze czujniki mają w praktycznych zastosowaniach pojazdów autonomicznych.
Poznaj inne potencjalne zastosowania dla pojazdów autonomicznych
Autonomiczne pojazdy rewolucjonizują branże wykraczające daleko poza transport. Od rolnictwa i logistyki po budownictwo i nadzór, zaawansowane technologie nawigacyjne umożliwiają inteligentniejsze, bezpieczniejsze i wydajniejsze operacje. Zapoznaj się z szeroką gamą innowacyjnych zastosowań opartych na autonomii.
Masz pytania?
Znajdź odpowiedzi na najczęściej zadawane pytania dotyczące prezentowanych przez nas zastosowań. Nasze FAQ zawiera jasne objaśnienia dla każdego z przedstawionych zastosowań. Pomaga użytkownikom zrozumieć praktyczne przypadki użycia i korzyści. Ponadto, jeśli nie znajdziesz potrzebnych informacji, skontaktuj się z nami bezpośrednio.
Jak działają samochody autonomiczne?
Samochody autonomiczne to pojazdy wyposażone w zaawansowane systemy, które umożliwiają im nawigację i sterowanie bez interwencji człowieka. Pojazdy te wykorzystują kombinację autonomicznych czujników jazdy i algorytmów do postrzegania otoczenia, podejmowania decyzji i wykonywania zadań związanych z autonomiczną jazdą. Celem jest osiągnięcie pełnej autonomii, w której pojazd może bezpiecznie i wydajnie obsługiwać wszystkie aspekty jazdy.
Samochody autonomiczne polegają na szeregu kluczowych technologii do postrzegania otoczenia. Należą do nich:
- GNSS (Global Navigation Satellite System): do uzyskiwania aktualnych informacji w czasie rzeczywistym o pozycji, prędkości i kierunku jazdy samochodu autonomicznego.
- INS (Inercyjne Systemy Nawigacyjne): aby utrzymać dokładność w przypadku przerw w sygnale GNSS. Zapewnia aktualizacje w czasie rzeczywistym dotyczące pozycji, prędkości i kierunku autonomicznego samochodu.
- LiDAR (Light Detection and Ranging): wykorzystanie wiązek laserowych do tworzenia szczegółowej mapy 3D otoczenia pojazdu. Technologia ta pomaga samochodowi wykrywać i mierzyć obiekty wokół niego, w tym inne pojazdy, pieszych i znaki drogowe.
- Radar (Radio Detection and Ranging): wykorzystanie fal radiowych do wykrywania prędkości, odległości i kierunku obiektów. Radar jest szczególnie przydatny w trudnych warunkach pogodowych oraz do wykrywania obiektów z większych odległości.
- Kamery: do przechwytywania informacji wizualnych o otoczeniu pojazdu, w tym oznaczeń pasów ruchu, sygnalizacji świetlnej i znaków drogowych. Są one niezbędne do interpretacji złożonych wskazówek wizualnych i podejmowania decyzji na podstawie danych wizualnych.
Jaka jest różnica między ADAS w samochodach a samochodami autonomicznymi?
ADAS (Advanced Driver Assistance Systems) zwiększa bezpieczeństwo jazdy, zapewniając funkcje takie jak utrzymanie pasa ruchu, adaptacyjny tempomat i automatyczne hamowanie, ale wymaga aktywnego nadzoru kierowcy. Natomiast samochody autonomiczne, wyposażone w autonomiczne systemy jazdy, mają na celu pełną automatyzację obsługi pojazdu bez interwencji człowieka.
Podczas gdy ADAS wspiera kierowców, pomagając w wykonywaniu zadań i poprawiając bezpieczeństwo, samochody autonomiczne są zaprojektowane do obsługi wszystkich aspektów autonomicznej jazdy, od nawigacji po podejmowanie decyzji, oferując wyższy poziom automatyzacji (poziomy SAE) i wygody. Charakterystyki lub funkcje ADAS są przypisane do poziomów SAE poniżej 3, a samochody autonomiczne jako takie odpowiadają co najmniej poziomowi 4.
Jak działa GPS?
GPS (Global Positioning System) funkcjonuje, wykorzystując konstelację satelitów, precyzyjne taktowanie oraz trilaterację do wyznaczania pozycji w dowolnym miejscu na Ziemi.
Oto najprostsze, jasne wyjaśnienie:
1 – Sygnały nadawane przez satelity
Około 30 satelitów GPS krąży wokół Ziemi, każdy z nich nieustannie transmituje:
– Swoją dokładną pozycję w przestrzeni
– Dokładny czas wysłania sygnału (przy użyciu zegarów atomowych)
Sygnały te przemieszczają się z prędkością światła.
2 – Twój odbiornik mierzy czas przesyłu
Odbiornik GPS (w telefonie, dronie, INS itp.) odbiera sygnały z wielu satelitów.
Mierząc czas dotarcia każdego sygnału, oblicza odległość:
odległość = prędkość światła × czas podróży
3 – Trilateracja oblicza Twoją lokalizację
Aby znaleźć swoją pozycję, odbiornik wykorzystuje trilaterację (nie triangulację):
- Przy 1 satelicie → możesz być w dowolnym miejscu na sferze
- Przy 2 satelitach → okręgi się przecinają
- Przy 3 satelitach → dwa możliwe punkty
- Przy 4 satelitach → Twoja dokładna pozycja 3D + korekta zegara
Twój odbiornik nie posiada zegara atomowego, dlatego czwarty satelita jest potrzebny do rozwiązania problemów z synchronizacją czasu.
4 – Korekcje poprawiają dokładność
Surowe dane GPS zawierają błędy pochodzące z:
- Atmosfera (jonosfera, troposfera)
- Dryf zegara satelitarnego
- Błędy w przewidywaniu orbity
- Odbicia wielotorowe (sygnały odbijające się od budynków)
Aby poprawić dokładność:
- SBAS (np. WAAS, EGNOS) zapewnia korekcje w czasie rzeczywistym
- Techniki RTK i PPP korygują błędy do poziomu centymetra
- Sprzężenie INS (IMU + GPS) wygładza i wypełnia luki podczas utraty sygnału
6 – Wynik końcowy
Odbiornik łączy wszystkie dane w celu oszacowania:
- Szerokość geograficzna
- Długość geograficzna
- Wysokość
- Prędkość
- Precyzyjny czas
Nowoczesne odbiorniki GPS robią to dziesiątki lub setki razy na sekundę.
Co to jest INS?
INS (Inercyjny System Nawigacyjny) to samodzielne rozwiązanie nawigacyjne, które określa pozycję, orientację i prędkość platformy, wykorzystując wyłącznie czujniki inercyjne — zazwyczaj:
- Akcelerometry (mierzą przyspieszenie liniowe)
- Żyroskopy (mierzą obrót kątowy)
Jak to działa?
Żyroskopy śledzą, jak platforma się obraca (przechył, pochylenie, odchylenie). Akcelerometry mierzą ruch wzdłuż trzech osi. Filtr nawigacyjny (zwykle filtr Kalmana) integruje te pomiary w czasie, aby obliczyć:
- Pozycja (x, y, z)
- Prędkość
- Orientacja (attitude)
Kluczowe cechy
- W pełni autonomiczny: do działania nie są potrzebne żadne sygnały zewnętrzne
- Wysoka częstotliwość aktualizacji: często setki lub tysiące pomiarów na sekundę
- Działa w każdym środowisku: Działa pod ziemią, pod wodą, w pomieszczeniach i w środowiskach pozbawionych GPS.
- Precyzja zależy od klasy czujnika: Zakresy od IMU klasy konsumenckiej do taktycznych i nawigacyjnych systemów INS
Typowe zastosowania
- Przemysł lotniczy i obronny: pociski rakietowe, UAV, amunicja krążąca, pojazdy opancerzone
- Marine: AUV, USV, statki, systemy hydrograficzne
- Robotyka lądowa: pojazdy autonomiczne, SLAM, AGV
- Badania i mapowanie: mobilne systemy mapowania, LiDAR
- Przemysł: stabilizacja, śledzenie ruchu
