Verbesserung der Navigation autonomer Fahrzeuge
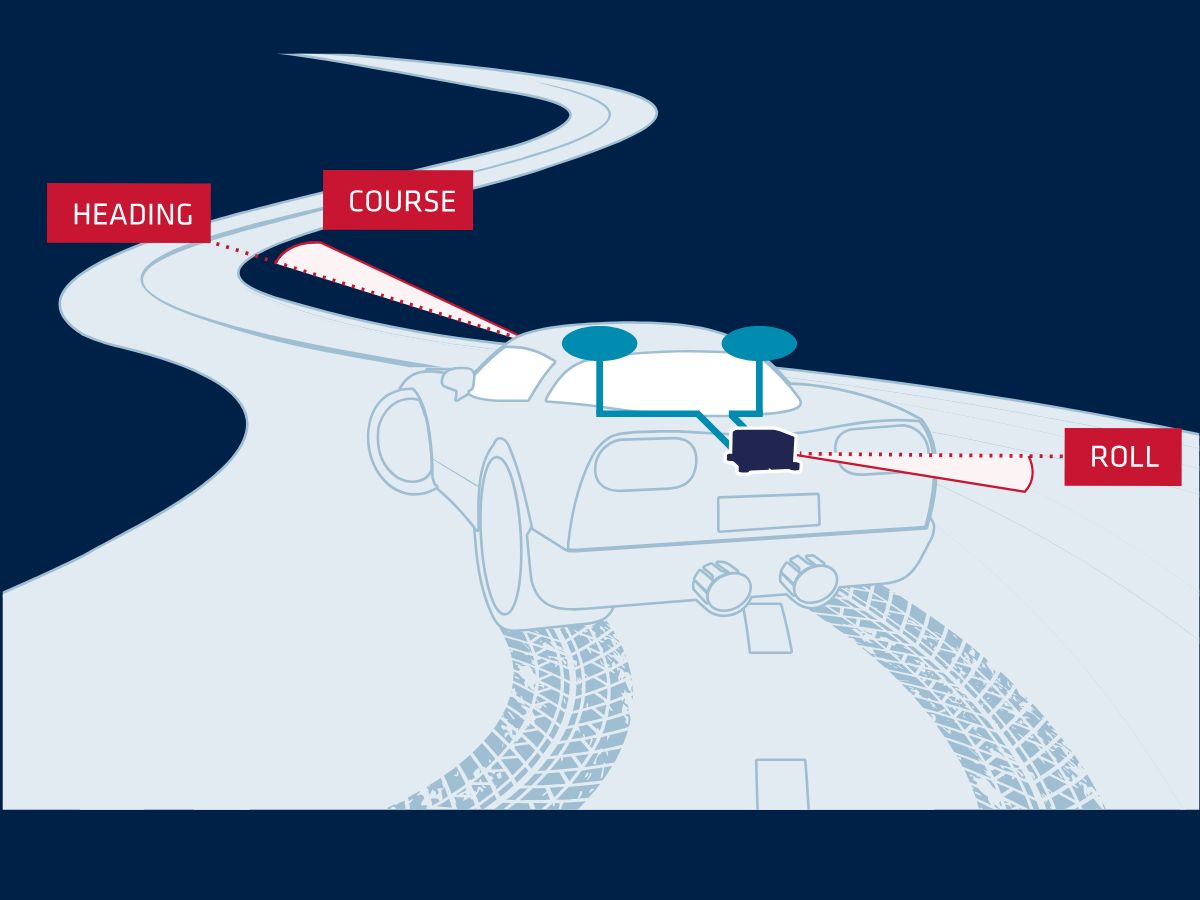
Unsere Inertial Navigation Systems (INS) liefern Roll-, Nick- und Gierwinkel in Echtzeit, integriert mit einem GNSS-Empfänger, um die Genauigkeit bei Signalausfällen aufrechtzuerhalten. Sie synchronisieren und stabilisieren zusätzliche Geräte, wie z. B. LiDAR oder Kameras, präzise für Anwendungen in fahrerlosen Autos.
Darüber hinaus schafft die Integration eines INS mit anderen Sensoren ein umfassendes Verständnis der Fahrzeugumgebung. Des Weiteren ermöglicht diese Integration die Navigation in komplexen und dynamischen Szenarien mit grösserer Präzision.

Verbesserung der Sicherheit und Zuverlässigkeit von selbstfahrenden Fahrzeugen
Eine der größten Herausforderungen für selbstfahrende Autos sind städtische Gebiete, in denen GNSS durch hohe Gebäude abgeschirmt werden können und sich die Verkehrsbedingungen schnell ändern können. INS die erforderliche Genauigkeit und Zuverlässigkeit, um sich in solchen Umgebungen sicher zu bewegen.
Unsere INS nutzendie MEMS-Technologie( Micro). Dies ermöglicht kleinere, genauere und energieeffizientere Sensoren, wodurch die Gesamtleistung von INS autonomen Fahrzeugen verbessert wird.
Inertiale Navigationssysteme für selbstfahrende Autos
Unsere Inertial Navigation Systems sind so konzipiert, dass sie die unübertroffene Genauigkeit und Zuverlässigkeit bieten, die für die Navigation in komplexen Umgebungen wie städtischen Schluchten erforderlich ist.
Wir haben fortschrittliche INS-Lösungen entwickelt, die sich nahtlos in Ihre autonomen Fahrzeugsysteme integrieren und Echtzeitdaten liefern, die eine präzise Positionierung und eine reibungslose, genaue Steuerung gewährleisten. Von städtischen Strassen bis hin zu anspruchsvollem Gelände ermöglichen wir Ihrer Technologie für selbstfahrende Autos die robusten, leistungsstarken Navigationsfunktionen, die für einen sicheren, zuverlässigen und effizienten autonomen Betrieb erforderlich sind.

Entdecken Sie unsere Lösungen für selbstfahrende Autos
Gestalten Sie mit uns die Zukunft der autonomen Mobilität, wo Innovation auf Präzision trifft und jede Fahrt mit unvergleichlicher Genauigkeit geführt wird. Entdecken Sie unsere Lösungen für die Navigation von selbstfahrenden Autos.

Ellipse-D

Ekinox Micro

Ekinox-D
Broschüre für autonome Anwendungen
Erhalten Sie unsere Broschüre sofort in Ihrem Posteingang!
Fallstudien
Erfahren Sie in unseren Fallstudien, wie unsere Inertialtechnologie die Landschaft der selbstfahrenden Fahrzeuge verändert. Diese realen Beispiele zeigen, wie unsere fortschrittlichen Sensoren eine präzise Navigation und robuste Leistung ermöglichen. Unsere Lösungen verbessern die Sicherheit in komplexen städtischen Umgebungen. Sie gewährleisten eine optimale Funktionalität, wenn keine GNSS-Signale verfügbar sind.

Schienenfehlererkennung von TREALIS mit Apogee Navsight
Positionierung von Straßenbahnen und Zügen
Wie GapEOD mit Ellipse für sicherere geophysikalische Untersuchungen sorgt
Positionierung von Straßenbahnen und Zügen
Forschung an autonomen Fähren in realen städtischen Wasserstraßen
Autonome Fährenführung


Sie reden über uns
Hören Sie aus erster Hand von den Innovatoren und Kunden, die unsere Technologie übernommen haben.
Ihre Erfahrungsberichte und Erfolgsgeschichten verdeutlichen den bedeutenden Einfluss, den unsere Sensoren in praktischen Anwendungen für autonome Fahrzeuge haben.
Weitere potenzielle Anwendungen für autonome Fahrzeuge erkunden
Autonome Fahrzeuge verändern Industrien weit über den Transport hinaus. Von der Landwirtschaft über die Logistik bis hin zum Bauwesen und der Überwachung ermöglichen fortschrittliche Navigationstechnologien intelligentere, sicherere und effizientere Abläufe. Entdecken Sie die breite Palette innovativer Anwendungen, die durch Autonomie ermöglicht werden.
Haben Sie Fragen?
Hier finden Sie Antworten auf die häufigsten Fragen zu den von uns vorgestellten Anwendungen. Unsere FAQ bietet klare Erklärungen für jede vorgestellte Anwendung. Sie hilft den Benutzern, praktische Anwendungsfälle und Vorteile zu verstehen. Wenn Sie die benötigten Informationen nicht finden, kontaktieren Sie uns bitte direkt.
Wie funktionieren selbstfahrende Autos?
Selbstfahrende Autos sind Fahrzeuge, die mit hochentwickelten Systemen ausgestattet sind, die es ihnen ermöglichen, ohne menschliches Zutun zu navigieren und sich selbst zu steuern. Diese Fahrzeuge nutzen eine Kombination aus autonomen Fahrsensoren und Algorithmen, um ihre Umgebung wahrzunehmen, Entscheidungen zu treffen und selbstfahrende Aufgaben auszuführen. Ziel ist es, vollständige Autonomie zu erreichen, bei der das Fahrzeug alle Aspekte des Fahrens sicher und effizient bewältigen kann.
Selbstfahrende Autos sind auf eine Reihe von Schlüsseltechnologien angewiesen, um ihre Umgebung wahrzunehmen. Dazu gehören:
- GNSS (Global Navigation Satellite System): um Echtzeit-Updates über die Position, Geschwindigkeit und Richtung des selbstfahrenden Autos zu erhalten.
- INS (Inertial Navigation Systems): zur Aufrechterhaltung der Genauigkeit bei GNSS-Signalausfällen. Es liefert Echtzeit-Updates über die Position, Geschwindigkeit und Richtung des selbstfahrenden Autos.
- LiDAR (Light Detection and Ranging): Verwendung von Laserstrahlen zur Erstellung einer detaillierten 3D-Karte der Fahrzeugumgebung. Diese Technologie hilft dem Auto, Objekte in seiner Umgebung zu erkennen und zu messen, einschließlich anderer Fahrzeuge, Fußgänger und Verkehrsschilder.
- Radar (Radio Detection and Ranging): Verwendung von Funkwellen zur Erfassung von Geschwindigkeit, Entfernung und Richtung von Objekten. Radar ist besonders nützlich bei widrigen Wetterbedingungen und zur Erfassung von Objekten über größere Entfernungen.
- Kameras: zur Erfassung visueller Informationen über die Umgebung des Fahrzeugs, einschliesslich Fahrbahnmarkierungen, Verkehrssignale und Strassenschilder. Sie sind unerlässlich für die Interpretation komplexer visueller Hinweise und für Entscheidungen auf der Grundlage visueller Daten.
Was ist der Unterschied zwischen ADAS in Autos und selbstfahrenden Autos?
ADAS (Advanced Driver Assistance Systems) verbessert die Fahrsicherheit durch Funktionen wie Spurhalteassistent, adaptive Geschwindigkeitsregelung und automatisches Bremsen, erfordert jedoch eine aktive Fahrerüberwachung. Im Gegensatz dazu zielen selbstfahrende Autos, die mit autonomen Fahrsystemen ausgestattet sind, darauf ab, den Fahrzeugbetrieb ohne menschliches Zutun vollständig zu automatisieren.
Während ADAS die Fahrer durch die Unterstützung bei Aufgaben und die Verbesserung der Sicherheit unterstützt, sind selbstfahrende Autos so konzipiert, dass sie alle Aspekte des autonomen Fahrens übernehmen, von der Navigation bis zur Entscheidungsfindung, und bieten ein höheres Maß an Automatisierung (SAE-Stufen) und Komfort. ADAS-Eigenschaften oder -Funktionen werden den SAE-Stufen unterhalb von 3 zugeschrieben, und selbstfahrende Autos entsprechen als solche mindestens der Stufe 4.
Wie funktioniert GPS?
GPS (Global Positioning System) funktioniert durch die Nutzung einer Satellitenkonstellation, präziser Zeitmessung und Trilateration, um Ihre Position überall auf der Erde zu bestimmen.
Hier ist die einfachste, klare Erklärung:
1 – Satelliten senden Signale
Etwa 30 GPS-Satelliten umkreisen die Erde und senden kontinuierlich:
– Ihre genaue Position im Weltraum
– Die genaue Sendezeit des Signals (unter Verwendung von Atomuhren)
Diese Signale bewegen sich mit Lichtgeschwindigkeit.
2 – Ihr Empfänger misst die Laufzeit
Ein GPS-Empfänger (in Ihrem Telefon, Ihrer Drohne, Ihrem INS usw.) empfängt Signale von mehreren Satelliten.
Durch die Messung der Ankunftszeit jedes Signals berechnet er die Entfernung:
Entfernung = Lichtgeschwindigkeit × Laufzeit
3 – Trilateration berechnet Ihren Standort
Um Ihre Position zu finden, verwendet der Empfänger Trilateration (nicht Triangulation):
- Mit 1 Satelliten → könnten Sie sich irgendwo auf einer Kugel befinden
- Mit 2 Satelliten → schneiden sich Kreise
- Mit 3 Satelliten → zwei mögliche Punkte
- Mit 4 Satelliten → Ihre genaue 3D-Position + Uhrenkorrektur
Ihr Empfänger hat keine Atomuhr, daher wird der 4. Satellit benötigt, um Timing-Fehler zu beheben.
4 – Korrekturen verbessern die Genauigkeit
Rohes GPS weist Fehler auf aufgrund von:
- Atmosphäre (Ionosphäre, Troposphäre)
- Satelliten-Uhrdrift
- Fehler bei der Orbitvorhersage
- Mehrwege-Reflexionen (Signale, die von Gebäuden abprallen)
Zur Verbesserung der Genauigkeit:
- SBAS (z. B. WAAS, EGNOS) bietet Echtzeitkorrekturen
- RTK- und PPP-Techniken korrigieren Fehler bis auf Zentimetergenauigkeit
- INS-Kopplung (IMU + GPS) glättet und überbrückt Lücken bei Signalverlust
6 – Endergebnis
Der Empfänger kombiniert alle Daten, um Folgendes zu schätzen:
- Breitengrad
- Längengrad
- Höhe
- Geschwindigkeit
- Genaue Zeit
Moderne GPS-Empfänger tun dies Dutzende oder Hunderte Male pro Sekunde.
Was ist INS?
Ein INS (Inertiales Navigationssystem) ist eine eigenständige Navigationslösung, die die Position, Orientierung und Geschwindigkeit einer Plattform ausschließlich mittels Trägheitssensoren bestimmt – typischerweise:
- Beschleunigungsmesser (messen die lineare Beschleunigung)
- Gyroskope (messen die Winkelrotation)
Wie funktioniert es?
Gyroskope verfolgen, wie sich die Plattform dreht (Roll, Nick, Gier). Beschleunigungsmesser messen die Bewegung entlang dreier Achsen. Ein Navigationsfilter (normalerweise ein Kalman-Filter) integriert diese Messungen im Laufe der Zeit, um Folgendes zu berechnen:
- Position (x, y, z)
- Geschwindigkeit
- Orientierung (Ausrichtung)
Hauptmerkmale
- Vollständig autonom: Für den Betrieb sind keine externen Signale erforderlich
- Hohe Aktualisierungsrate: Oft Hunderte oder Tausende von Messungen pro Sekunde
- Funktioniert in jeder Umgebung: Funktioniert unterirdisch, unter Wasser, in Innenräumen und in GPS-verweigernden Umgebungen
- Die Präzision hängt von der Sensorqualität ab: Reicht von IMUs in Konsumqualität bis hin zu taktischen INS und INS in Navigationsqualität
Häufige Anwendungen
- Luft- und Raumfahrt & Verteidigung: Raketen, UAVs, herumlungernde Munition, gepanzerte Fahrzeuge
- Marine: AUVs, USVs, Schiffe, Hydrographiesysteme
- Landrobotik: Autonome Fahrzeuge, SLAM, AGVs
- Vermessung und Kartierung: Mobile Mapping Systeme, LiDAR
- Industrie: Stabilisierung, Bewegungserfassung
