Enhancing autonomous cars navigation
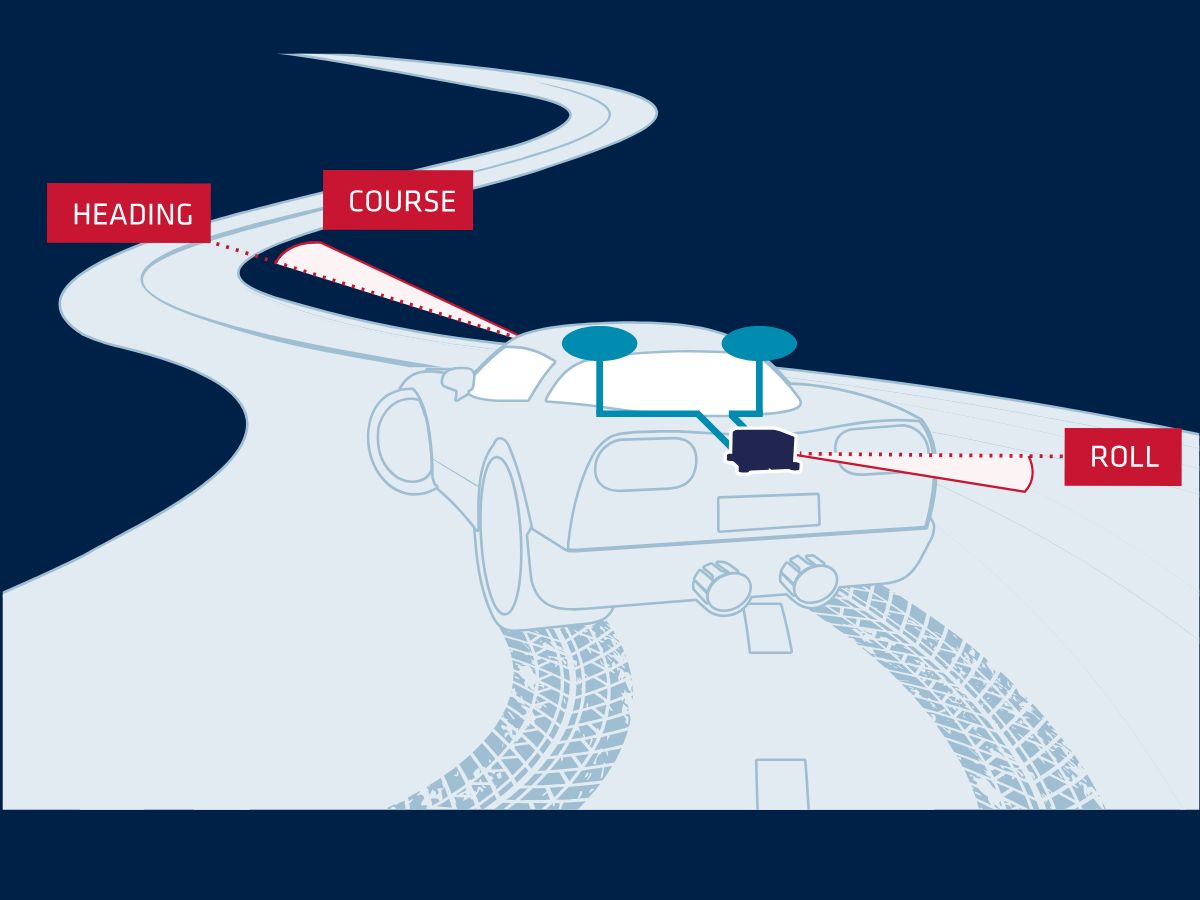
Our Inertial Navigation Systems (INS) provide real-time roll, pitch, and heading, integrated with a GNSS receiver to maintain accuracy during signal outages. They precisely synchronize and stabilize additional equipment, such as LiDAR or cameras, for driverless car applications.
In addition, integrating an INS with other sensors creates a comprehensive understanding of the vehicle’s environment. Furthermore, this integration enables navigation of complex and dynamic scenarios with greater precision.

Improving safety and reliability of self-driving vehicles
One of the most challenging environments for self-driving cars is urban areas, where GNSS signals can be obstructed by tall buildings, and traffic conditions can change rapidly. INS provides the accuracy and reliability needed to navigate these environments safely.
Our INS sensors use Micro-Electro-Mechanical Systems (MEMS) technology. This allows smaller, more accurate, and more power-efficient sensors, enhancing the overall performance of INS in autonomous cars.
Inertial navigation systems for self-driving cars
Our Inertial Navigation Systems are engineered to provide the unrivaled accuracy and reliability required to navigate complex environments, like urban canyons, with confidence.
We created advanced INS solutions that integrates seamlessly with your autonomous vehicle systems, delivering real-time data that ensures precise positioning and smooth, accurate control. From urban streets to challenging terrains, we empower your self-driving car technology with the robust, high-performance navigation capabilities needed to achieve safe, reliable, and efficient autonomous operation.

Discover our solutions for self-driving cars
Drive the future of autonomous mobility with us, where innovation meets precision, and every journey is guided with unparalleled accuracy. Discover our solutions for self-driving cars navigation.

Ellipse-D

Ekinox Micro

Ekinox-D
Autonomous applications brochure
Receive our brochure instantly in your inbox!
Case studies
Explore how our inertial technology reshapes the landscape of self-driving vehicles in our case studies section. These real-world examples show how our advanced sensors enable precise navigation and robust performance. Our solutions enhance safety in complex urban environments. They ensure optimal functionality when GNSS signals are unavailable.






They talk about us
Hear first hand, from the innovators and clients who have adopted our technology.
Their testimonials and success stories illustrate the significant impact our sensors have in practical autonomous vehicles applications.
Explore other potential applications for autonomous vehicles
Autonomous vehicles are transforming industries far beyond transportation. From agriculture and logistics to construction and surveillance, advanced navigation technologies are enabling smarter, safer, and more efficient operations. Explore the wide range of innovative applications powered by autonomy.
Do you have questions?
Find answers to the most common questions about the applications we showcase. Our FAQ provides clear explanations for each featured application. It helps users understand practical use cases and benefits. Furthermore, if you don’t find the information you need, contact us directly.
How self-driving cars work?
Self-driving cars are vehicles equipped with sophisticated systems that enable them to navigate and control themselves without human intervention. These vehicles use a combination of autonomous driving sensors and algorithms to perceive their environment, make decisions, and perform self driving tasks. The goal is to achieve full autonomy, where the vehicle can handle all aspects of driving safely and efficiently.
Self-driving cars rely on an array of key technologies to perceive their surroundings. These include:
- GNSS (Global Navigation Satellite System): to get the real-time updates on the self-driving car position, speed, and direction.
- INS (Inertial Navigation Systems): to maintain accuracy in case of GNSS signal outages. It provides real-time updates on the self driving car position, speed, and direction.
- LiDAR (Light Detection and Ranging): use of laser beams to create a detailed 3D map of the vehicle’s environment. This technology helps the car detect and measure objects around it, including other vehicles, pedestrians, and road signs.
- Radar (Radio Detection and Ranging): use of radio waves to detect the speed, distance, and direction of objects. Radar is particularly useful in adverse weather conditions and for detecting objects at longer ranges.
- Cameras: to capture visual information about the vehicle’s environment, including lane markings, traffic signals, and road signs. They are essential for interpreting complex visual cues and making decisions based on visual data.
What is the difference between ADAS in cars and self-driving cars?
ADAS (Advanced Driver Assistance Systems) enhances driving safety by providing features like lane-keeping, adaptive cruise control, and automatic braking, but requires active driver supervision. In contrast, self-driving cars, equipped with autonomous driving systems, aim to fully automate vehicle operation without human intervention.
While ADAS supports drivers by assisting with tasks and improving safety, self-driving cars are designed to handle all aspects of autonomous driving, from navigation to decision-making, offering a higher level of automation (SAE levels) and convenience. ADAS characteristics or features are attributed to SAE levels below 3 and self-driving cars as such correspond to minimum level 4.
How GPS works ?
GPS (Global Positioning System) works by using a constellation of satellites, precise timing, and trilateration to determine your position anywhere on Earth.
Here’s the simplest clear explanation:
1 – Satellites broadcast signals
About 30 GPS satellites orbit Earth, each continuously transmitting:
– Its exact position in space
– The exact time the signal was sent (using atomic clocks)
These signals travel at the speed of light.
2 – Your receiver measures travel time
A GPS receiver (in your phone, drone, INS, etc.) picks up signals from multiple satellites.
By measuring how long each signal took to arrive, it computes the distance:
distance = speed of light × travel time
3 – Trilateration computes your location
To find your position, the receiver uses trilateration (not triangulation):
- With 1 satellite → you could be anywhere on a sphere
- With 2 satellites → circles intersect
- With 3 satellites → two possible points
- With 4 satellites → your exact 3D position + clock correction
Your receiver doesn’t have an atomic clock, so the 4th satellite is needed to solve timing errors.
4 – Corrections improve accuracy
Raw GPS has errors from:
- Atmosphere (ionosphere, troposphere)
- Satellite clock drift
- Orbit prediction errors
- Multipath reflections (signals bouncing off buildings)
To improve accuracy:
- SBAS (e.g., WAAS, EGNOS) provides real-time corrections
- RTK and PPP techniques correct errors down to centimeter-level
- INS coupling (IMU + GPS) smooths and bridges gaps during signal loss
6 – Final output
The receiver combines all data to estimate:
- Latitude
- Longitude
- Altitude
- Velocity
- Precise time
Modern GPS receivers do this dozens or hundreds of times per second.
What is INS ?
An INS (Inertial Navigation System) is a self-contained navigation solution that determines a platform’s position, orientation, and velocity using only inertial sensors—typically:
- Accelerometers (measure linear acceleration)
- Gyroscopes (measure angular rotation)
How it Works ?
Gyroscopes track how the platform rotates (roll, pitch, yaw). Accelerometers measure movement along three axes. A navigation filter (usually a Kalman filter) integrates these measurements over time to compute:
- Position (x, y, z)
- Velocity
- Attitude (orientation)
Key Characteristics
- Fully autonomous: No external signals needed to operate
- High update rate: Often hundreds or thousands of measurements per second
- Operates in any environment: Works underground, underwater, indoors, and in GPS-denied environments
- Precision depends on sensor grade: Ranges from consumer-grade IMUs to tactical and navigation-grade INS
Common Applications
- Aerospace & defense: missiles, UAVs, loitering munitions, armored vehicles
- Marine: AUVs, USVs, ships, hydrography systems
- Land robotics: autonomous vehicles, SLAM, AGVs
- Surveying & mapping: mobile mapping systems, LiDAR
- Industrial: stabilization, motion tracking
