Покращення навігації автономних автомобілів
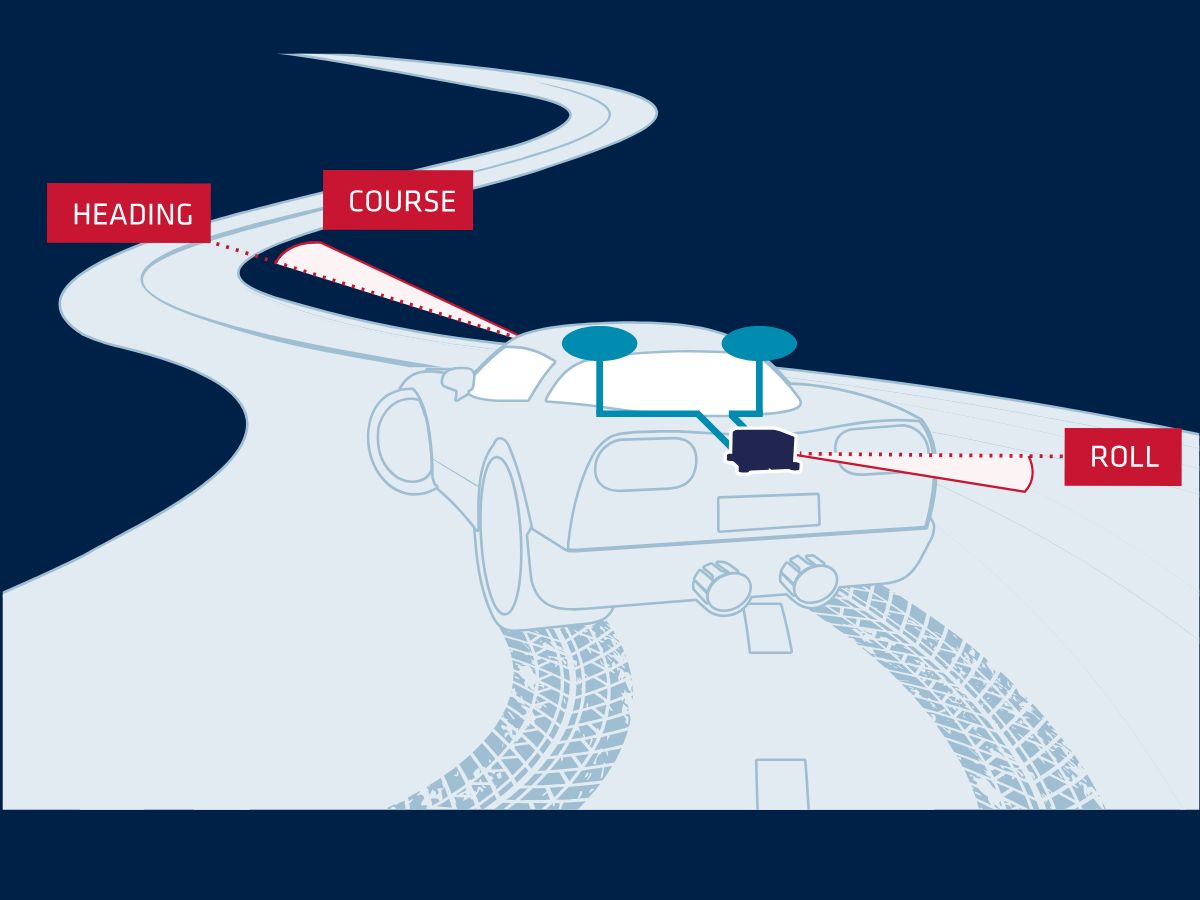
Наші інерційні навігаційні системи (INS) забезпечують вимірювання roll, pitch та heading в режимі реального часу та інтегровані з GNSS для збереження точності під час перебоїв у сигналі. Вони забезпечують точну синхронізацію та стабілізацію додаткового обладнання, такого як LiDAR або камери, для застосування в безпілотних автомобілях.
Крім того, інтеграція INS іншими датчиками дозволяє отримати всебічне уявлення про оточення транспортного засобу. Більше того, така інтеграція забезпечує навігацію в складних і динамічних умовах із більшою точністю.

Підвищення безпеки та надійності безпілотних транспортних засобів
Одним із найскладніших середовищ для безпілотних автомобілів є міські райони, де GNSS можуть блокуватися високими будівлями, а дорожні умови можуть стрімко змінюватися. INS точність і надійність, необхідні для безпечної навігації в таких умовах.
Наші INS використовують технологію Micro систем (MEMS). Це дозволяє створювати менші, точніші та енергоефективніші датчики, що підвищує загальну ефективність роботи INS автономних автомобілях.
Інерційні навігаційні системи для безпілотних автомобілів
Наші інерційні навігаційні системи розроблені для забезпечення неперевершеної точності та надійності, необхідних для впевненої навігації у складних умовах, таких як міські каньйони.
Ми створили передові INS , які безперешкодно інтегруються з системами ваших автономних транспортних засобів, надаючи дані в режимі реального часу, що забезпечують точне позиціонування та плавне й точне керування. Від міських вулиць до складних місцевостей — ми наділяємо вашу технологію безпілотних автомобілів потужними та високопродуктивними навігаційними можливостями, необхідними для безпечної, надійної та ефективної автономної роботи.

Ознайомтеся з нашими рішеннями для безпілотних автомобілів
Разом з нами рухайте майбутнє автономної мобільності, де інновації поєднуються з точністю, а кожна поїздка відбувається з безпрецедентною точністю. Ознайомтеся з нашими рішеннями для навігації безпілотних автомобілів.

Ellipse-D

Ekinox Micro

Ekinox-D
Брошура про автономні додатки
Отримайте нашу брошуру прямо на свою електронну пошту!
Приклади застосування
Дізнайтеся, як наша інерційна технологія змінює сферу безпілотних транспортних засобів, у розділі «Приклади з практики». Ці реальні приклади демонструють, як наші сучасні датчики забезпечують точну навігацію та надійну роботу. Наші рішення підвищують рівень безпеки в складних міських умовах. Вони гарантують оптимальну роботу навіть за відсутності GNSS .
Ellipse використовується в навігації автономних транспортних засобів
Автономна навігація
Система виявлення дефектів рейок від TREALIS із використанням Apogee Navsight
Визначення місцезнаходження трамваїв та поїздів
Як GapEOD сприяє підвищенню безпеки геофізичних досліджень за допомогою Ellipse
Визначення місцезнаходження трамваїв та поїздів
Дослідження автономних поромів на реальних міських водних шляхах
Автономне судноплавство на поромах


Про нас говорять
Послухайте безпосередньо від новаторів та клієнтів, які вже використовують нашу технологію.
Їхні відгуки та історії успіху демонструють значний вплив наших датчиків на практичне застосування в автономних транспортних засобах.
Дослідіть інші можливі сфери застосування автономних транспортних засобів
Автономні транспортні засоби змінюють галузі далеко за межами сфери транспорту. Від сільського господарства та логістики до будівництва та відеоспостереження — передові навігаційні технології забезпечують більш інтелектуальну, безпечну та ефективну роботу. Ознайомтеся з широким спектром інноваційних рішень, що базуються на технологіях автономного керування.
У вас є питання?
Знайдіть відповіді на найпоширеніші запитання щодо представлених нами додатків. У нашому розділі «Часті запитання» наведено чіткі пояснення щодо кожного з представлених додатків. Це допоможе користувачам зрозуміти практичні сценарії використання та переваги. Крім того, якщо ви не знайдете потрібної інформації, зверніться до нас безпосередньо.
Як працюють безпілотні автомобілі?
Автомобілі з автономним керуванням — це транспортні засоби, оснащені складними системами, що дозволяють їм орієнтуватися в просторі та керувати собою без втручання людини. Ці транспортні засоби використовують поєднання датчиків автономного керування та алгоритмів для сприйняття навколишнього середовища, прийняття рішень та виконання завдань з автономного керування. Мета полягає в досягненні повної автономності, за якої транспортний засіб зможе безпечно та ефективно виконувати всі аспекти керування.
Автомобілі з автопілотом використовують цілий ряд ключових технологій для сприйняття навколишнього середовища. До них належать:
- GNSS Глобальна навігаційна супутникова система): для отримання даних у режимі реального часу про місцезнаходження, швидкість та напрямок руху безпілотного автомобіля.
- INS інерційні навігаційні системи): для забезпечення точності у разі зникнення GNSS . Система надає дані в режимі реального часу про місцезнаходження, швидкість та напрямок руху безпілотного автомобіля.
- LiDAR (Light Detection and Ranging): використання лазерних променів для створення детальної 3D-карти навколишнього простору автомобіля. Ця технологія допомагає автомобілю виявляти та вимірювати відстань до об’єктів навколо нього, зокрема інших транспортних засобів, пішоходів та дорожніх знаків.
- Радар (Radio Detection and Ranging): використання радіохвиль для визначення швидкості, відстані та напрямку руху об’єктів. Радар особливо корисний у несприятливих погодних умовах та для виявлення об’єктів на великих відстанях.
- Камери: призначені для збору візуальної інформації про оточення автомобіля, зокрема про розмітку смуг руху, світлофори та дорожні знаки. Вони відіграють ключову роль у розпізнаванні складних візуальних сигналів та прийнятті рішень на основі візуальних даних.
У чому полягає різниця між системами ADAS в автомобілях та безпілотними автомобілями?
Системи ADAS (Advanced Driver Assistance Systems) підвищують безпеку руху завдяки таким функціям, як утримання смуги руху, адаптивний круїз-контроль та автоматичне гальмування, але вимагають постійного контролю з боку водія. На відміну від них, безпілотні автомобілі, оснащені системами автономного керування, призначені для повної автоматизації керування транспортним засобом без втручання людини.
Хоча системи ADAS допомагають водіям, полегшуючи виконання завдань та підвищуючи рівень безпеки, безпілотні автомобілі розроблені для управління всіма аспектами автономного руху — від навігації до прийняття рішень — забезпечуючи вищий рівень автоматизації (за класифікацією SAE) та зручності. Характеристики та функції систем ADAS відповідають рівням SAE нижче 3, тоді як безпілотні автомобілі як такі відповідають щонайменше рівню 4.
Як працює GPS?
GPS (Глобальна система позиціонування) використовує супутникову групу, точний хронометраж та трилатерацію для визначення вашого місцезнаходження в будь-якій точці Землі.
Ось найпростіше і зрозуміле пояснення:
1 – Супутники передають сигнали
Навколо Землі обертається близько 30 супутників GPS, кожен з яких безперервно передає:
– своє точне положення в просторі
– точний час відправлення сигналу (за допомогою атомних годинників)
Ці сигнали поширюються зі швидкістю світла.
2 – Ваш приймач вимірює час проходження сигналу
GPS-приймач (у вашому телефоні, дроні, INS тощо) приймає сигнали від декількох супутників.
Вимірюючи час, за який кожен сигнал доходить до приймача, система обчислює відстань:
відстань = швидкість світла × час проходження
3 – Трилатерація визначає ваше місцезнаходження
Щоб визначити своє місцезнаходження, приймач використовує метод трилатерації (а не триангуляції):
- Маючи 1 супутник → ви можете перебувати в будь-якій точці на земній кулі
- При наявності 2 супутників → кола перетинаються
- З 3 супутниками → дві можливі точки
- Завдяки 4 супутникам → ваше точне 3D-положення + корекція часу
Ваш приймач не має атомного годинника, тому для усунення помилок синхронізації потрібен четвертий супутник.
4 – Виправлення підвищують точність
У необроблених даних GPS містяться похибки, що виникають через:
- Атмосфера (іоносфера, тропосфера)
- Зсув супутникового годинника
- Похибки прогнозування орбіти
- Багатопроменеві відбиття (сигнали, що відбиваються від будівель)
Щоб підвищити точність:
- Система SBAS (наприклад, WAAS, EGNOS) забезпечує поправки в режимі реального часу
- Технології RTK та PPP дозволяють коригувати похибки з точністю до сантиметра
- INS (IMU GPS) згладжує коливання та заповнює прогалини під час втрати сигналу
6 – Кінцевий результат
Приймач об'єднує всі дані для розрахунку:
- Широта
- Довгота
- Висота над рівнем моря
- Швидкість
- Точний час
Сучасні GPS-приймачі роблять це десятки або сотні разів на секунду.
Що таке INS
А INS (інерційна навігаційна система) — це автономне навігаційне рішення, яке визначає положення, орієнтацію та швидкість платформи, використовуючи лише інерційні датчики — зазвичай:
- Акселерометри (вимірюють лінійне прискорення)
- Гіроскопи (вимірюють кутове обертання)
Як це працює?
Гіроскопи відстежують обертання платформи (roll, pitch, поворот). Акселерометри вимірюють переміщення вздовж трьох осей. Навігаційний фільтр (зазвичай фільтр Калмана) інтегрує ці вимірювання в часі для обчислення:
- Координати (x, y, z)
- Швидкість
- Ставлення (орієнтація)
Основні характеристики
- Повністю автономний: для роботи не потрібні зовнішні сигнали
- Висока частота оновлення: часто сотні або тисячі вимірювань на секунду
- Працює в будь-яких умовах: під землею, під водою, у приміщенні та вdenied
- Точність залежить від класу датчика: від IMU споживчого класу до INS тактичного та навігаційного класу
Типові сфери застосування
- Авіакосмічна та оборонна промисловість: ракети, безпілотні літальні апарати, безпілотні бойові засоби, броньовані машини
- Військово-морський флот: безпілотні підводні апарати (AUV), безпілотні надводні судна (USV), кораблі, гідрографічні системи
- Наземна робототехніка: автономні транспортні засоби, SLAM, автоматизовані транспортні засоби (AGV)
- Геодезія та картографія: мобільні картографічні системи, LiDAR
- Промислове застосування: стабілізація, відстеження руху
