




Stellar-40 タクティカルグレード慣性航法システム(INS)
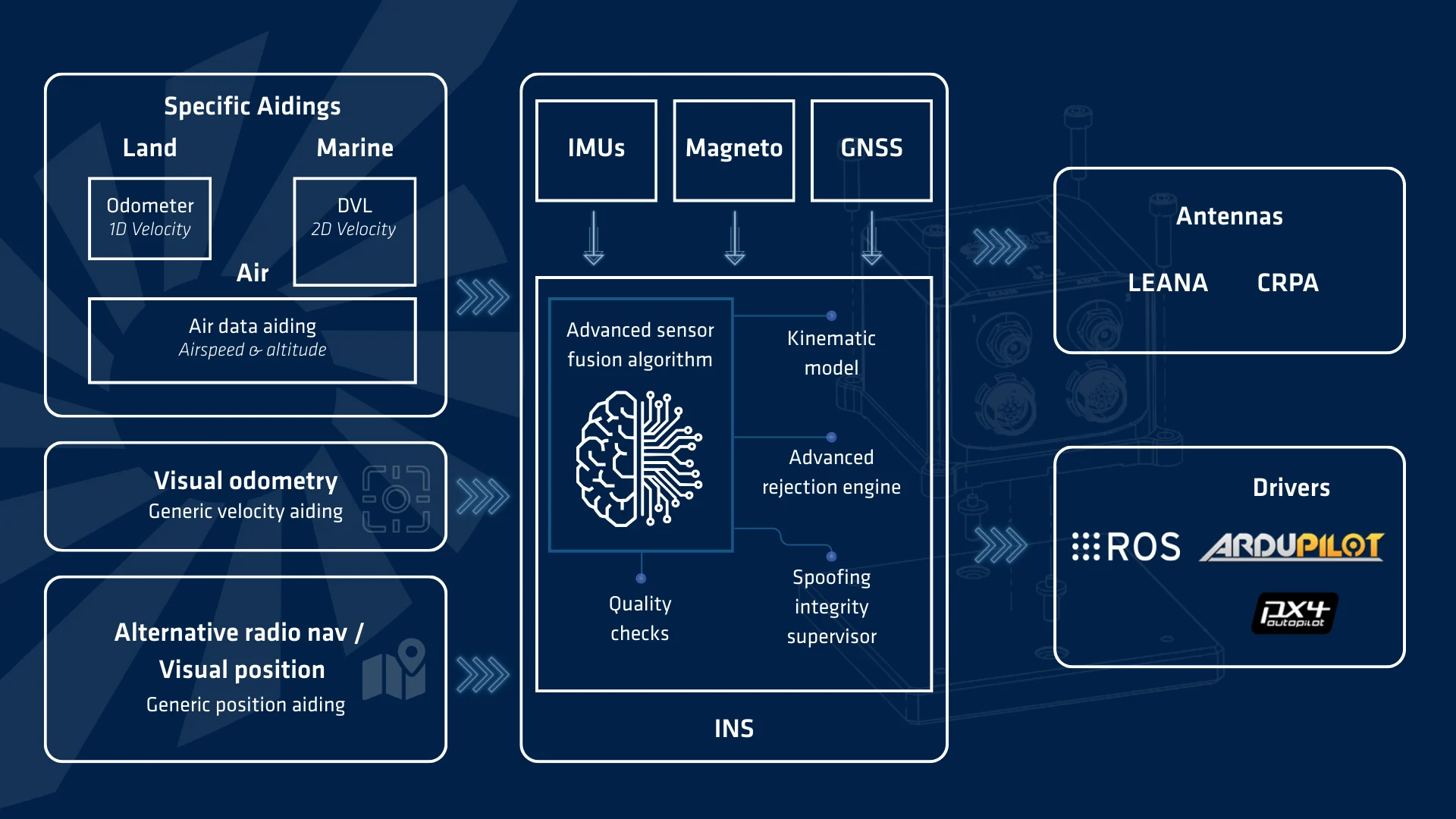
Stellar、SAF2Navスタックを搭載し、比類のない耐障害性を実現した戦GNSS航法システムです。堅牢な筐体内に、IMU、スプーフィング GNSS 、そして高度なセンサーフュージョンアルゴリズムを統合しています。
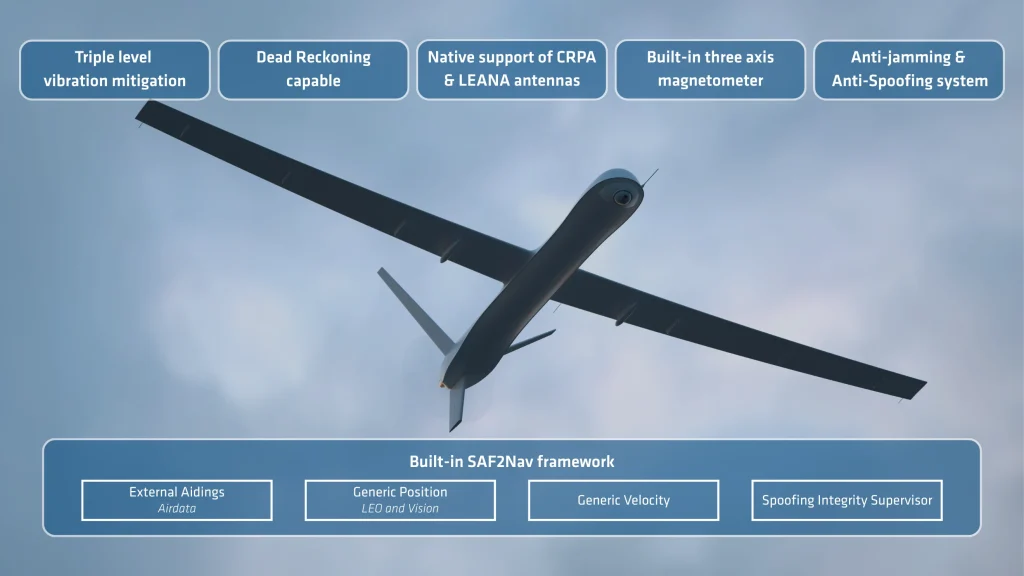
ハイエンドの性能と産業用レベルの柔軟性をStellar、拡張性に最適化された設計に独自の3層式振動低減アーキテクチャを採用しており、大量生産の厳しい要求を満たしています。
本製品の発売により、SBG Systems ミッションクリティカルな用途向けに最適化された慣性航法ソリューションのポートフォリオをSBG Systems 拡充します。Stellarフリーです。
Stellar-40
Stellar、進化する運用要件に対応するために立ち上げStellar の第一弾です。この戦術INS 、性能を損なうことなく、過酷な運用環境下での耐性を高め、拡張性を確保するという2つの主要な目標にINS 。
激しい振動という課題に対処するため、SBG Systems 機械工学の傑作とも言える独自の3層式振動保護システムSBG Systems 。設計を驚くほどシンプルに保ちつつ、製品の堅牢性と信頼性を確保するために、包括的なモード解析が実施されました。
SAF2Navエンジンを中核に据え、推測航法に対応Stellar、お客様のプラットフォームにシームレスに統合され、GNSS最も過酷な環境下でも、堅牢な航法機能を提供します。
すべての機能をご覧ください!




Stellar-40の概要
堅牢。高精度。シームレス。
Stellar-40の詳細については、以下の主要機能をご覧ください。
機械工学の傑作
振動は精度の大敵です。そのため、当社のINSは、三重の振動低減対策を講じています 。独自の機械設計により、センサーを三つの異なる段階で隔離し、最大限の精度を確保します。第一段階はIMUレベルびダウンピングで、センサー内部エ直接振動を吸収します。第二段階では最適化された筐体設計を採用しており、モーダル解析に基づき開発された筐体が共振を抑制し、筐体自体による振動を低減します。第三段階では外部ダンパーによる外部隔離を行い、装置をビークル構造から機械的に分離します。
SAF2Nav搭載の高耐久ナビゲーションスタック
GNSSはもはや必ずしも信頼できるものではありません 。そこで当社のINSでは、SAF2Navスタックを中核に据え、GNSSが利用できない場合や攻撃を受けた場合でも精度と安全性を確保します。このスタックは三つの主要な柱に基づいています。第一の柱は、マルチセンサーフュージョンです。GNSS、IMU、Air、レーダー、ビジョンの各データを統合し、単一の一貫したナビゲーションソリューションを提供します。 第二の柱は、新しいスプーフィングインテグリティ監視機構です。センサーを常時監視し、異常を即座に検知することで、重要なアラート発生までの時間を大幅に短縮します。第三の柱は、適応型キネマティックモデルです。プラットフォーム固有の運動特性にフュージョンアルゴリズムを自動で最適化することで、ナビゲーション精度を最大化します。
振動モニターリング機能の内蔵
構造共振を理解し、緩和するための振動監視は、常に簡単ではなく、多くの場合、専用の外部ハードウェアを必要とします。そのため、当社は包括的な監視ツールをStellar-40 INSに直接統合しました。このシステムは、最大16 kHzで動作する専用の高帯域幅加速度計と高度なオンボード処理機能を備えています。4つの異なる周波数帯域にわたるRMS、ピーク振幅、およびピーク周波数のリアルタイム可視化を提供し、ユーザーが重要な振動がどこで発生しているかを正確に特定できるようにします。さらに、この貴重なデータはシームレスに記録され、その後の詳細なFFT解析に再利用されます。

エコシステムとの高い互換性
優れたナビゲーションシステムも、システムアーキテクチャへのシームレスな統合能力によって真価が発揮されます。そのため、当社のINSは、エコシステム互換性を基盤となる重要な柱として設計しており、迅速な導入と統合作業の負荷低減を実現します。 第一に、本システムはすぐに使用可能なドライバーを備え、ROS2、ArduPilot、PX4といった業界標準の自律プラットフォームを標準対応しています。第二に、過酷な環境下での高い耐性を確保するため、高度なCRPAアンテナとのプラグアンドプレイ接続に対応しています。こうした高い相互運用性により、重要なあらゆるプラットフォームへのスムーズな展開を実現します。
任務遂行能力と実績の概要
あらゆる任務に対応
さまざまな運用環境における本製品の性能をご確認ください。各分野ごとに、任務遂行に役立つ利点と主要な仕様をまとめています。
航空任務の遂行状況
- UAVの航法:固定翼および回転翼プラットフォーム
- UAVの航法:固定翼および回転翼プラットフォーム
ミッション機能の内訳
過酷な航空任務向けに設計された本システムは、堅牢性と高精度を兼ね備え、固定翼機および回転翼機の両プラットフォームにシームレスに統合されます。
- 固定翼機および回転翼機向けに特別に設計された動的プロファイル。
- 振動の激しい航空機環境向けの3層式防振構造。
- SAF2Navスタックにより実現される、GNSS ジャミング スプーフィング下での測位精度の維持。
- SAF2Navスタックを活用した戦術的推測航法により、GNSS 状況下でも継続的な航法を実現します。
- ピトー管積分に対する風速の自動推定および補正。
- PX4およびArduPilotドライバーによる、シームレスなオートパイロット統合。
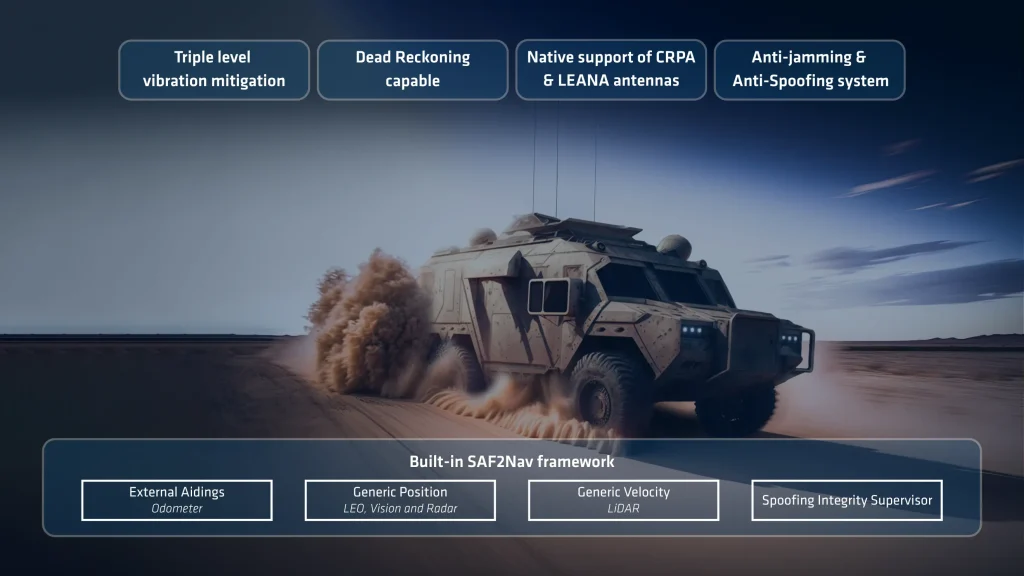
陸上任務の実績
- 陸上ナビゲーション:オンロードおよびオフロード車両
- 陸上ナビゲーション:オンロードおよびオフロード車両
ミッション機能の内訳
過酷な陸上車両ミッション向けに設計された本システムは、堅牢性、高精度、そしてあらゆる種類の陸上車両へのシームレスな統合を兼ね備えています。
- オフロード車やオンロード車に合わせて特別に設計されたダイナミックプロファイル。
- 振動の激しい環境向けの3層式防振構造。
- SAF2Navスタックにより実現される、GNSS ジャミング スプーフィング下での測位精度の維持。
- ホイールオドメーター スラム速度の入力を活用した推定航法性能の向上
- SAF2Navスタックを活用した戦術的推測航法により、GNSS 状況下でも継続的な航法を実現します。
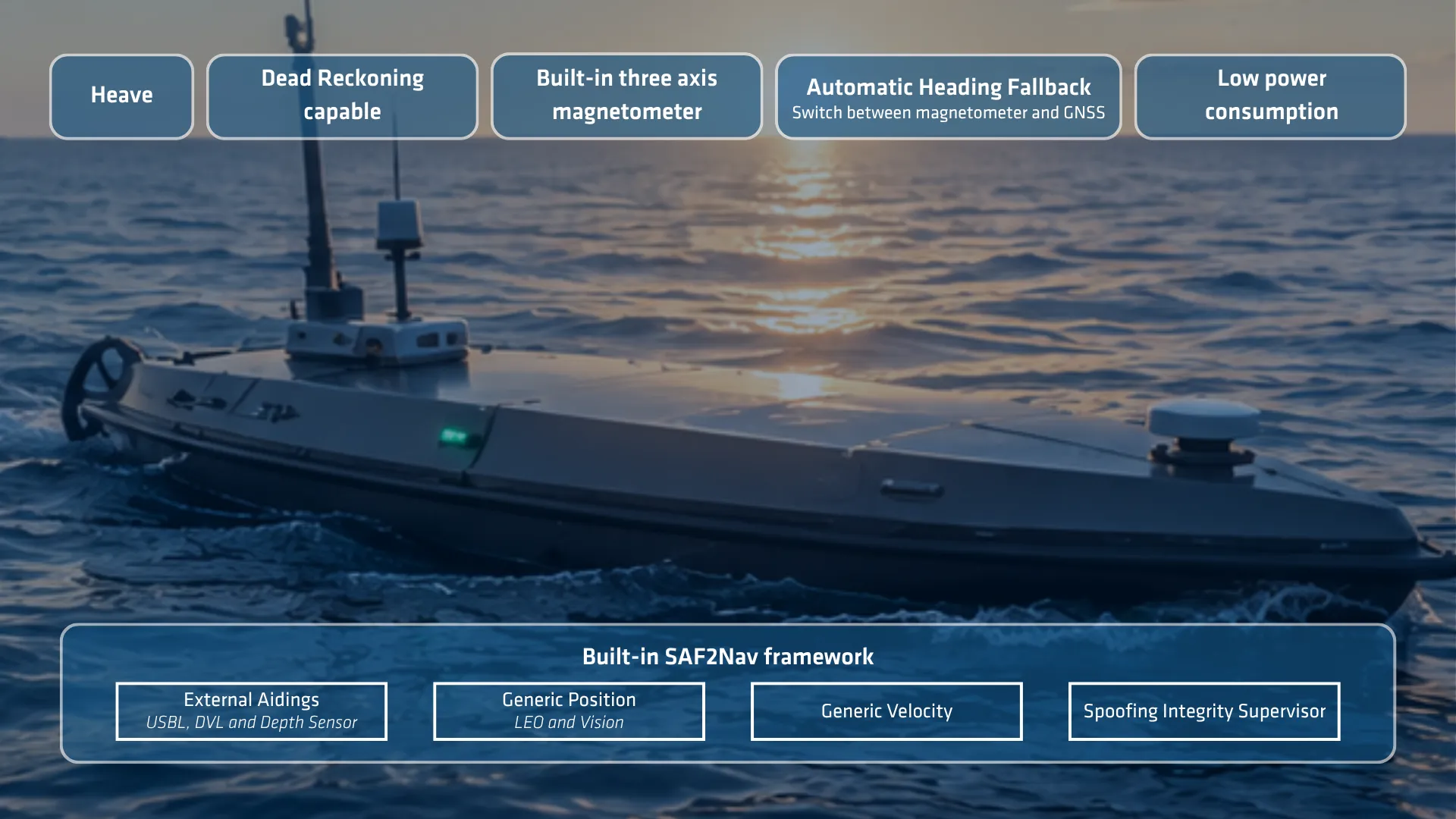
表面航行性能
- 海上航行:あらゆるサイズの有人および無人水上船舶
- 海上航行:あらゆるサイズの有人および無人水上船舶
ミッション機能の内訳
過酷な海上任務向けに設計された本システムは、堅牢性、高精度、そしてあらゆる種類の水上艦艇へのシームレスな統合を兼ね備えています。
- 水上艇向けに特別に設計された動的プロファイル。
- 振動の激しい環境向けの3層式防振構造。
- SAF2Navスタックにより実現される、GNSS ジャミング スプーフィング下での測位精度の維持。
- DVL 水流速度の入力による推定航法性能の向上
- 水路速度補正のための自動速度推定および補正。
- SAF2Navスタックを活用した戦術的推測航法により、GNSS 状況下でも継続的な航法を実現します。
仕様
対応車種
<span>Surface vessels, underwater vehicles, marine survey, marine & harsh marine</span> 航空用途
Plane, helicopters, aircraft, UAV 陸上用途
Car, automotive, train/railway, truck, two wheelers, heavy machinery, pedestrian, backpack, off road
GNSS性能
デュアルアンテナ、789チャンネル GNSS動作範囲
最大速度500m/s および最大高度 80km 周波数帯
マルチ周波数 GNSS機能
SBAS、RTK、PPK、RAW GPS信号
L1C/A、L1C、L2C、L2PY、L5 Galileo信号
E1、E5a、E5b、E6BC Glonass信号
L1C/A、L2C/A、L2P、L3OC BeiDou信号
B1I、B1C、B2a、B2I、B3I、B2b その他の信号
NaviC L5、L-Band、QZSS 初期測位(Time to First Fix)
< 35 s ジャミングとスプーフィング対策
自動ジャミング/スプーフィング対策、OSNMA対応、高度な自動マルチセンサー排除機能
環境仕様と動作範囲
IP-65 動作温度
-40 °C~71 °C 振動耐性
3 g RMS – 20Hz~2kHz 衝撃耐性
500 g(0.3 ms) 平均故障間隔(MTBF)(算出値)
246,000時間 準拠規格
MIL-STD 461G | MIL-STD 1275E | MIL-STD 810H
インターフェース
GNSS、RTCM、NTRIP、Airdata、オドメーター、汎用速度・位置入力 出力プロトコル
NMEA、ASCII、sbgECom(バイナリ)、REST API 入力プロトコル
NMEA、ASCII、sbgECom(バイナリ)、REST API データロガー
8 GB または 48時間(200Hz時) 出力レート
200 Hz(IMU、INS) シリアルポート
4系統シリアルI/O(最大921,600 bps) CAN
1系統 CAN 2.0A/B(最大1Mbps) Sync OUT
2系統同期出力(RS232:1系統、TTLレベル:1系統) Sync IN
4系統同期入力(RS232レベル) Ethernet
1系統Ethernet(フルデュプレックス、10/100 Base-T) PTP / NTP、NTRIP、Webインターフェース、FTP対応 コネクタ
Micro-D 15 (I/O用)×2、アンテナ用SMAコネクタ×2
機械的および電気的仕様
9~36 VDC 消費電力
< 3 W without antennas 重量(g)
365 g / ダンパー付きで443 g 寸法 (長さx幅x高さ)
81 mm × 130 mm × 40 mm
タイミング仕様
< 200 ns PTP精度
< 1 µs PPS精度
< 1 µs (jitter < 1 µs) デッドレコニング時のドリフト
1 ppm
Stellar-40データシート
製品の最新機能や仕様情報をメールで受け取れます。
Stellar-40を他の製品と比較する
ナビゲーションやモーション/ヒーブ計測用途に向けた当社の高性能慣性センサーシリーズを比較いただけます。詳細な仕様は、リクエストに応じてハードウェアマニュアルを提供します。

Stellar-40 |
||||
|---|---|---|---|---|
| 単独測位による水平位置精度 | シングルポイント水平位置 1.2 m | シングルポイント水平位置 1.2 m | シングルポイント水平位置 1.0 m | シングルポイント水平位置 1.2 m |
| スプーフィング ジャミング 評価 | スプーフィング ジャミング 評価 ★★★★★ | スプーフィング ジャミング 評価 ★★★☆☆ | スプーフィング ジャミング 評価 ★★★☆☆ | スプーフィング ジャミング 評価 ★★★☆☆ |
| ジャミングとスプーフィング耐性 | スプーフィング ジャミング すべての構成、全周波数帯域、高度な監視および対策 | スプーフィング ジャミング すべての構成、デュアルバンド、監視および対策 | スプーフィング ジャミング すべての構成、トリプルバンド、高度な監視および対策 | スプーフィング ジャミング すべての構成、デュアルバンド、監視および対策 |
| 振動耐性 | 振動耐性 三重レベル | 振動耐性 ワンレベル | 振動耐性 ワンレベル | 振動耐性 ワンレベル |
| 推測航法 | 推測航法 誤差0.2%まで(オンロード車両、デュアルアンテナGNSS オドメーター) | 推測航法 誤差0.2%まで(オンロード車両、デュアルアンテナGNSS オドメーター) | Dead reackoning < 0.1 % DT (Onroad vehicle, dual antenna GNSS and odometer) | 推測航法 誤差0.5%まで(オンロード車両、デュアルアンテナGNSS オドメーター) |
| 重量(g) | 重量(g) 365 g | 重量(g) 165 g | Weight (g) < 900 g | 重量(g) 65 g |
| 寸法 (長さx幅x高さ) | 外形寸法(長さ×幅×高さ) 81 × 130 × 40 mm | 寸法 (LxWxH) 42 x 57 x 60 mm | 寸法 (LxWxH) 130 x 100 x 75 mm | 寸法 (LxWxH) 46 x 45 x 32 mm |



互換性
アンチジャミングおよびスプーフィング対策アンテナの対応製品ラインナップ
当社では、互換性を十分に検証・確認したアンチジャミングおよびアンチスプーフィング対応アンテナの最適ラインナップを選定しています。このラインアップには、CRPA(Controlled Reception Pattern Antenna)やLEANA(Low-Elevation Anti-Jam Navigation Antenna)といった実績ある技術が含まれています。
推奨ソリューションをご確認ください!







事例紹介
当社のソリューションがパフォーマンス向上、ダウンタイム削減、運用効率改善を実現する実世界のユースケースをご覧ください。高度なセンサーと直感的なインターフェースが、お客様のアプリケーションで卓越した成果を上げるために必要な精度と制御をどのように提供するかを学びましょう。






その他の製品とアクセサリー
SBG Systemsのソリューションが、多様なアプリケーションを通じてお客様の業務をどのように変革できるかをご覧ください。SBG Systemsのモーション&ナビゲーションセンサーとソフトウェアにより、お客様は最先端技術を利用し、それぞれの分野で成功と革新を推進できます。
様々な産業における慣性航法とポジショニングソリューションの可能性を解き放ちましょう。
Qinertia GNSS-INS


製造プロセス
IMU、AHRS、INSなど、SBG Systemsのすべての製品に込められた精度と専門知識をご覧ください。このビデオでは、高性能慣性航法システムをいかに細心の注意を払って設計、製造、テストしているかをご紹介します。高度なエンジニアリングから厳格な品質管理まで、当社の製造プロセスは、各製品が信頼性と精度の最高水準を満たすことを保証します。
今すぐビデオをご覧ください。

お見積りのご依頼
SBG Systemsについて
業界のプロフェッショナルやクライアントが、自社プロジェクトで当社製品を活用された経験と実績をご紹介しています。
彼らの知見は、INS特徴づける品質と性能を反映し、現場で信頼されるソリューションとしての役割を強調しています。
革新的な技術がどのように業務を変革し、生産性を向上させ、様々な用途で信頼性の高い成果をもたらしたかをご覧ください。
FAQセクション
FAQセクションへようこそ!ここでは、当社の最先端技術とその用途に関する、お客様から寄せられる最も重要なご質問にお答えします。製品の機能、インストール手順、トラブルシューティングのヒント、および当社のコンパクトなINSを最大限に活用するためのベストプラクティスに関する包括的な回答をご用意しています。ガイダンスを求めている新規ユーザーの方にも、高度な洞察を求めている経験豊富なプロフェッショナルの方にも、当社のFAQはお客様が必要とする情報を提供するように設計されています。
回答はこちら!
航海における推測航法とは何か?
推測航法とは、GNSS 依存せず、慣性およびその他のセンサーデータを利用して継続的な追跡を維持する航法手法である。通常、GNSS システムは位置情報を完全に喪失する。推測航法では、システムは時間の経過とともに徐々にドリフトする連続的な位置を計算する。このドリフトの速度は、IMU 外部補助センサーの利用可能性に依存する。
外部データ(Airデータビジョンなど)については、どのような形式に対応していますか?
Stellar-40は、明確に定義されたメッセージフレームを利用する独自のsbgEComプロトコルを使用しています。これらの事前定義されたメッセージを使用することで、システムは、その情報を提供できるあらゆる外部センサーから、Airデータ、機体速度、および絶対位置データをシームレスに取り込むことができます。
風速推定値を手動で入力する特定の欄はありますか?
いいえ、必要ありません。Stellar-40の高度なセンサーフュージョンアルゴリズムは、風の状態をリアルタイムで自動的に計算および推定するため、手動で入力する必要がありません。
陸上アプリケーション向けに利用可能な外部支援オプションにはどのようなものがありますか?
陸上プラットフォーム向けに、Stellar-40は、特にGNSSが利用できない環境において、航法精度を向上させるためのさまざまな補助入力に対応しています。これらには、ハードウェアオドメーター(ホイールオドメトリー)、外部センサー(LiDARや光学センサーなど)からの速度補助、および絶対位置補助が含まれます。
Stellar-40の減衰バージョンと非減衰バージョンのどちらを選択すればよいですか?
適切な選択は運用環境によって異なります。過酷な振動環境下で使用されるプラットフォーム(深部攻撃ドローンや無人地上車両(UGV)など)には、ダンピング仕様を強く推奨します。ご自身の用途に適したバージョンが不明な場合は、サポートチームが適切な選択をお手伝いします。
SBASとは何ですか?
SBASとは何ですか?
衛星補強システム(SBAS) は、衛星測位の精度、完全性、可用性、および継続性をGNSS 。 当初は航空分野を支援するために開発されたSBASですが、現在では、無人航空機(UAV)、海上航行、精密農業、GISマッピング、自動運転車、慣性航法システム(INS)などの用途において、貴重な航法支援手段となっています。リアルタイムキネマティック(RTK)や精密点位置測定(PPP)とは異なり、SBASは、ローカル基地局やインターネット接続を必要とせずに、無料でメートル級の測位精度を提供します。
スタンドアロン型GNSS は、GPS、ガリレオ、GLONASS、北斗などの衛星コンステレーションに属する衛星からの疑似距離を測定することで、自身の位置を特定します。 しかし、これらの測定値には、衛星クロックのドリフト、軌道(エフェメリス)誤差、電離層遅延、対流圏遅延、受信機のノイズ、マルチパスなど、いくつかの誤差要因が影響します。SBASは、これらの誤差のうち最も大きなものを継続的に推定し、ナビゲーションソリューションを大幅に改善するリアルタイムの補正情報を放送します。
SBASのアーキテクチャは、地域全体に配置された、精密に測量された基準局のネットワークに依存しています。これらの基準局GNSS 継続的に監視し、測定された衛星までの距離と既知の位置を比較することで、衛星の時計誤差、軌道誤差、および電離層誤差を推定します。測定データはマスター制御センターに送信され、そこですべての基準局からのデータが統合されて、補正メッセージと完全性情報が生成されます。これらのメッセージはその後、静止軌道衛星にアップリンクされ、同衛星からSBAS対応GNSS に向けて再送信されます。 受信機は、自身の位置を計算する前にこれらの補正を適用することで、擬似距離測定に影響を与える主な誤差要因を効果的に低減します。
数学的には、補正後の疑似距離は次のように表すことができる:
P修正済み = P測定値 − Δ時計 − Δ軌道 − Δイオノ
ここで Pmeasured は元の疑似距離の測定値であり、 Δclock は衛星クロックの補正を表し、 Δ軌道 は軌道補正を表し、 Δiono は電離層遅延補正である。
これらの補正により、通常、GNSS 測定誤差は、およそ3~10メートルから1~2メートル程度まで低減されます。この精度レベルは、RTKやPPPで達成されるセンチメートルレベルの性能には及ばないものの、SBASには「完全性監視」という大きな利点があります。SBASは単に位置精度を向上させるだけでなく、監視対象のすべての衛星の状態を継続的に評価し、時計の異常、軌道誤差、または信号の劣化によって衛星の信頼性が低下した場合、ユーザーに迅速に警告を発します。 この機能は、ユーザーがナビゲーションソリューションを信頼できるかどうかを把握しなければならない、安全性が極めて重要な用途において不可欠です。
世界中でいくつかの地域別SBASサービスが運用されています。これには、北米のWAAS、欧州のEGNOS、日本のMSAS、インドのGAGAN、ロシアのSDCM、韓国のKASS、そしてオーストラリアとニュージーランドのSouthPANが含まれます。最新の GNSS、一般的に、その地理的位置に応じて、複数のSBASサービスを自動的にサポートしています。
慣性航法システムにおいて、SBASはより正確でGNSS 提供し、センサーフュージョンの性能を向上させます。拡張カルマンフィルタ(EKF)は、GNSS および速度測定値を用いて、慣性センサーによって蓄積されたドリフトを定期的に制限します。GNSS測定ノイズや衛星に関連するバイアスを低減し、より安定した位置および速度の更新を実現するとともに、航法アルゴリズムに貴重な完全性情報を提供します。ただし、GNSS 向上させるものではなく、GNSS 補うこともできません。信号が途絶している間、航法性能全体はIMU INS IMU 依存します。
したがって、SBASは、高い信頼性と完全性を備えた、無料で世界中で利用可能なメートル級の測位を必要とする用途にとって、優れたソリューションです。特に、センチメートル級の精度を達成することよりも堅牢な測位が重視される、自動運転車、無人航空機(UAV)、船舶航行、農業、および産業用システムに最適です。測量級の高精度測位が求められる用途では、RTKやPPPが依然として推奨される補正技術ですが、SBASは、GNSS 補完する、信頼性が高く広く利用可能な手段として機能します。
