自動運転車向け高精度ナビゲーション
慣性航法システム(INS)は、自律走行車のアプリケーションに多くの利点を提供します。加速度計やジャイロスコープなどのセンサーを使用することにより、INSソリューションは、外部信号に依存することなく、継続的かつ正確なナビゲーションデータを提供します。
当社のINSは、車両の位置、速度、および向きに関するリアルタイムの更新を提供し、GNSSが利用できない環境でも正確なナビゲーションを保証します。時間の経過に伴う誤差を最小限に抑え、車両の位置決めの精度を維持するための高度なアルゴリズムを開発しました。

困難な環境下での堅牢性
INS 、トンネル、都市部のビル群、樹冠が密集した地域など、GNSSエリアでも確実にINS 。信号ジャミング スプーフィング 保護スプーフィング GNSS 補完してナビゲーションの信頼性をGNSS 。
本システムは、車両の動きに関するフィードバックを瞬時に提供し、迅速な意思決定と適応的な対応を可能にします。INS 外部信号に依存することなく継続的にINS 、動的な環境に最適です。経路計画、障害物回避、ルート最適化などの高度なアルゴリズム向けに高精度なデータを生成します。その結果、自律システムはよりスムーズで効率的な動作を実現します。
さらに、天候、地形、信号障害にかかわらず、一貫した性能を維持します。要するに、INS 自律性をINS 、信頼性の高いナビゲーションを確保することで、あらゆる条件下で車両が安全かつ効率的に動作することを可能にします。

リアルタイムデータとセンサーフュージョン
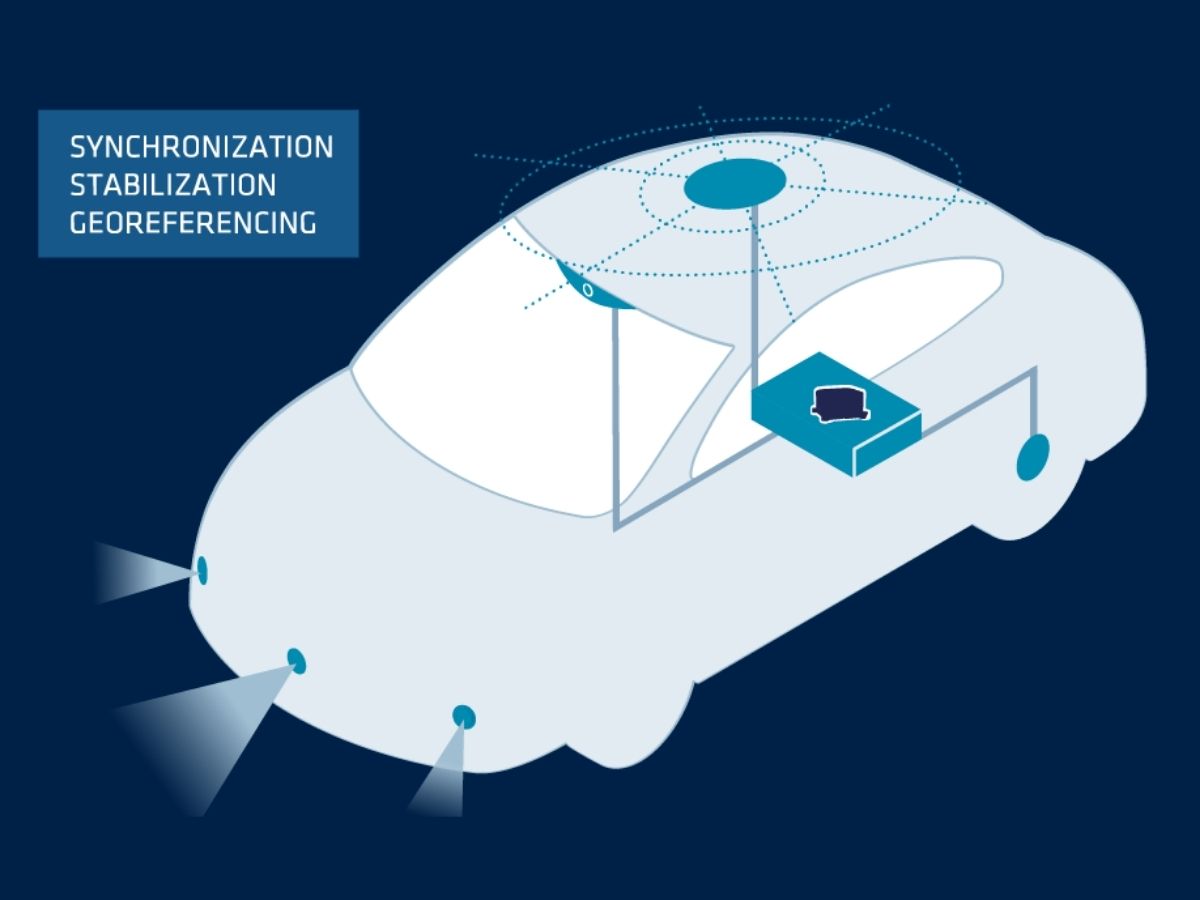
当社のセンサーは、リアルタイムのモーションデータと姿勢データを提供するため、自律走行車は、地形、道路状況、または交通状況の変化に応じて、ステアリング、加速、およびブレーキを即座に調整できます。また、安定性と制御を維持するのにも役立ちます。
他のナビゲーション支援(GNSS、LiDAR、カメラなど)と組み合わせることで、全体的な精度と信頼性が向上します。これらのセンサーフュージョンは、状況認識と意思決定能力を強化します。複数のセンサーからのデータを統合することにより、当社のINSは外部要因によって引き起こされる不正確さを修正し、より信頼性の高いナビゲーションを保証します。
自律走行車向けの当社のソリューションをご覧ください
当社のソリューションは、UGVプラットフォームとシームレスに統合し、最も困難な条件でも信頼性の高い性能を発揮します。

Ellipse-D

Ekinox Micro

Ekinox-D
自律アプリケーションのパンフレット
パンフレットを直接受信箱に届けます。






SBG Systemsについて
SBG Systemsの技術を採用したイノベーターやクライアントからの直接の声をお聞きください。
当社のセンサーが、実際の自律走行車アプリケーションに大きな影響を与えていることは、お客様の声や成功事例が物語っています。
自律慣性システムによるその他のアプリケーションを見る
自律慣性システムが、さまざまな業界の業務をどのように変革しているかをご覧ください。ロボティクスや産業オートメーションから、鉱業やロジスティクスまで、当社の高性能ソリューションは、GNSSが困難な環境でも、正確なナビゲーション、姿勢、およびモーションデータを提供します。信頼性の高い自律性によって実現される新しい可能性を探求してください。
ご質問はありますか?
私たちが紹介するアプリケーションに関する最も一般的な質問への回答を見つけてください。お探しのものが見つからない場合は、お気軽に直接お問い合わせください。
自動運転車の自律レベルとは?
自動運転車の自律レベルは、自動車技術者協会(SAE)によって6つのレベル(レベル0からレベル5)に分類され、車両操作における自動化の範囲を定義しています。以下に内訳を示します。
- レベル0:自動化なし - 人間のドライバーが常に車両を完全に制御し、アラートや警告などの受動的なシステムのみを使用します。
- レベル1:運転支援 - 車両はステアリングまたは加速/減速のいずれかを支援できますが、人間のドライバーは制御を維持し、環境を監視する必要があります(例:アダプティブクルーズコントロール)。
- レベル2:部分自動化 - 車両はステアリングと加速/減速の両方を同時に制御できますが、ドライバーは常に注意を払い、いつでも引き継ぐ準備ができている必要があります(例:テスラのオートパイロット、GMのSuper Cruise)。
- レベル3:条件付き自動化 - 車両は特定の条件下ですべての運転を処理できますが、人間のドライバーはシステムからの要求に応じて介入する準備ができている必要があります(例:高速道路での運転)。ドライバーは積極的に監視する必要はありませんが、警戒を怠らないようにする必要があります。
- レベル4:高度な自動化 - 車両は、人間の介入なしに、特定の条件または環境(都市部や高速道路など)内で自律的にすべての運転タスクを実行できます。ただし、他の環境または特別な状況下では、人間が運転する必要がある場合があります。
- レベル5:完全自動化 - 車両は完全に自律的であり、人間の介入なしに、すべての条件下ですべての運転タスクを処理できます。ドライバーは不要で、車両はあらゆる条件下であらゆる場所で動作できます。
これらのレベルは、基本的な運転支援から完全な自律性まで、自動運転車技術の進化を定義するのに役立ちます。
オドメーターとは何ですか?
オドメーター とはオドメーター 車両の走行距離を測定するための計オドメーター 。これは、車両がどれだけの距離を走行したかという重要な情報を提供し、メンテナンスのスケジュール策定、燃費の計算、再販価格の査定など、さまざまな目的に役立ちます。
走行距離計は、車両の車輪の回転数に基づいて距離を測定します。タイヤのサイズに基づいた校正係数により、車輪の回転が距離に変換されます。
多くのナビゲーションアプリ、特に車載システムでは、オドメーター INS データと統合することで、全体的な精度を向上させることができます。センサーフュージョンと呼ばれるこのプロセスは、両システムの長所を組み合わせたものです。
ジャミングとスプーフィングとはどういう意味ですか?
スプーフィング 、以下のような衛星航法システムの信頼性や精度に重大な影響を及ぼす可能性のある2種類のスプーフィング 。 GNSSのような衛星航法システムの信頼性と精度に重大な影響を及ぼす可能性のある2つの干渉形態です。
ジャミング 、GNSS 使用する周波数帯で干渉信号を送信することにより、衛星信号を意図的に妨害することをジャミング 。この干渉により、正規の衛星信号が圧倒されたりかき消されたりし、GNSS 情報を正確に処理できなくなることがあります。ジャミング 、敵の航法能力を妨害するために軍事作戦で一般的にジャミング 、民間システムにも影響を及ぼし、航法機能の障害や運用上の課題を引き起こす可能性があります。
一方、スプーフィング、GNSS 模倣した偽の信号を送信することを指します。こうした偽の信号により、GNSS 誤った位置や時刻を算出してしまう可能性があります。スプーフィング 、ナビゲーションシステムを誤った方向に誘導したり、誤った情報を与えたりするためにスプーフィング 、車両や航空機がコースを外れたり、誤った位置データが提供されたりする原因となるスプーフィング 。単に信号の受信を妨げるだけのジャミング異なり、スプーフィング 偽の情報を正当なものとして提示することで、受信機をスプーフィング 欺きます。
ジャミングとスプーフィングは、GNSSに依存するシステムの完全性に対し、重大な脅威をもたらします。そのため、妨害のある環境や困難な状況下での信頼性の高い運用を確保するためには、高度な対抗策とレジリエントな測位技術が不可欠となります。
デッドレコニングとは?
デッドレコニングは、GPSのような外部信号に依存せず、測定された運動情報を用いて既知の過去位置から連続的に現在位置を推定することで、車両の現在位置を決定する航法です。
実際には、システムは基準点(多くの場合、最後に既知の正確な位置)から開始し、加速度計、ジャイロスコープ、車輪オドメトリ、または速度ログなどのオンボードセンサーを使用して、車両が時間の経過とともにどのように移動したかを推定します。これらのモーション測定値を積分することにより、推測航法は速度、向き、および変位の変化を計算し、徐々に更新された位置推定を構築します。GPSが利用できない、または劣化した環境でも完全に自律的なナビゲーションを提供しますが、推測航法は本質的に誤差の蓄積の影響を受けます。小さなセンサーバイアス、スケールファクター誤差、または環境の影響が時間の経過とともに大きくなり、推定された軌道が現実からずれていきます。
このドリフトを軽減するために、デッドレコニングは、最新の慣性航法システムでGNSS、磁力計、気圧計、または地形マッチング技術などの外部補助と組み合わされることがよくあります。その制限にもかかわらず、デッドレコニングは絶対参照が利用できない場合でも、継続的なリアルタイム測位を保証するため、ナビゲーションの基本的な原則であり続けています。
慣性航法システムとは?
INS(慣性航法装置)は、慣性センサーを用いて移動体の動きを継続的に測定することで、その位置、速度、姿勢を決定する自己完結型のナビゲーションソリューションです。その中核には、INSは3つの直交軸に沿った線形加速度を検出するための3軸加速度計と、同じ軸周りの角速度を測定するための3軸ジャイロスコープに依存しています。これらの測定値を時間的に積分することで、システムは既知の開始点からプラットフォームの速度、姿勢、位置がどのように変化するかを算出します。
INS GPSや無線ビーコン、視覚的な基準点といった外部信号に依存INS ため、水中、屋内、地下、あるいは軍事的なジャミング など、外部の航法支援手段が利用できない、遮断されている、あるいは機能低下している環境においても、確実に動作することができます。
現代のINSは通常、生のセンサーデータを統合し、ドリフトを軽減し、最も正確なナビゲーション状態を推定するために、カルマンフィルターをはじめとする高度なフィルタリングアルゴリズムを組み込んでいます。多くのアプリケーションでは、長期的なドリフトを抑制し、極めて安定したナビゲーションを実現するため、INSはGNSS、オドメーター、ドップラー速度ログ、または磁力計と結合されます。その結果、航空機、UAV、ミサイル、自律走行車、船舶、AUV、そして動きと向きの正確かつ継続的な認識を必要とする幅広い産業システムにとって不可欠な、堅牢で高更新レートのナビゲーションソリューションが提供されます。
