GNSS停止時のナビゲーション継続性
当社のナビゲーションソリューションは、特に他のナビゲーション技術が機能しない可能性のある困難な環境において、無人地上車両(UGV)にいくつかの利点をもたらします。
お客様のUGVは、GNSS信号が利用できない、信頼できない、または意図的に妨害されている環境(都市部の峡谷、地下トンネル、または紛争地域など)でも効果的に動作できるようになりました。これは、GNSS干渉がUGVのナビゲーション精度を損なう可能性のある救助および防衛ミッションにとって非常に重要です。
当社のナビゲーションソリューションのおかげで、お客様のUGVは、GNSSのような外部参照に依存せずに、中断のないナビゲーションデータを受信します。これにより、通信または外部信号が失われた場合でも、UGVは状況認識と自律性を維持できます。

動的環境下での高精度
リアルタイムデータは、車両の位置、速度、および姿勢(ロール、ピッチ、ヨー)に関する当社のナビゲーションシステムによって常に収集され、起伏の多い地形やオフロード条件などの非常にダイナミックな環境でも正確な制御を可能にします。
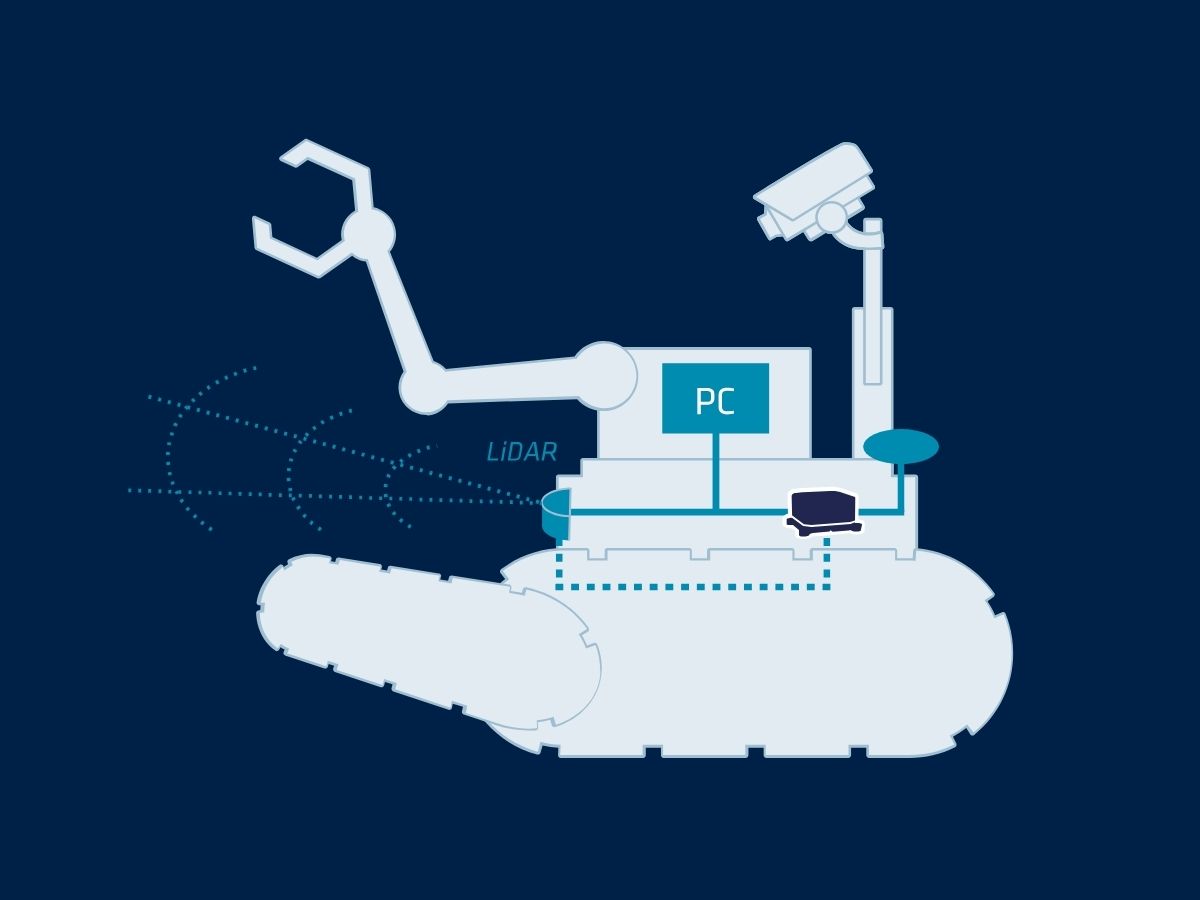
当社のセンサーの精度により、複雑で急速に変化する環境でも信頼性の高い性能が保証されます。車両の位置データを増やすために、当社のINSをカメラ、LiDAR、オドメトリなどの他のオンボードセンサーと統合して、マルチセンサーナビゲーションシステムを形成できます。このセンサーフュージョンにより、全体的なローカリゼーションの精度と状況認識が向上します。
さらに、それらは非常に信頼性の高いナビゲーションデータを提供し、衝突またはミッションの失敗の可能性を減らします。これは、安全が最優先される軍事作戦や危険な環境では特に重要です。
過酷な条件における堅牢性
自律走行地上車両は、砂漠、森林、災害地帯などの極限環境で動作することが多く、粉塵、天候、電磁干渉などの環境要因が他のナビゲーションシステムに影響を与える可能性があります。
当社のソリューションは、このような条件に対して高い耐性を持ち、堅牢な性能を保証します。高精度な姿勢および位置データを提供することにより、当社のセンサーはUGVが複雑な経路を自律的に計画および追跡する能力を高め、人間の介入を最小限に抑えます。
この機能により、防衛、ロジスティクス、および産業アプリケーションにおける運用効率が向上します。

製品の選択
当社のソリューションは、UGVプラットフォームとシームレスに統合し、最も困難な条件でも信頼性の高い性能を発揮します。

Ellipse-A

Ellipse-E

Ellipse-N

Ellipse-D

Ekinox Micro
防衛アプリケーションのリーフレット
パンフレットを直接受信箱に届けます。
事例紹介
当社のUGV慣性ソリューションの成功事例をご覧ください。複数の業界におけるUGV運用に対する当社の高度なナビゲーションシステムの大きな影響について学びます。
各ケーススタディを通じて、当社の高度な慣性センサーとGNSSテクノロジーが、実用的な状況で比類のない精度、信頼性、およびパフォーマンスを一貫して提供してきたことを明らかにする具体的な例を検証します。当社のソリューションが複雑な課題にどのように取り組み、卓越した運用を推進するかについての詳細な洞察と実践的な例を入手してください。
当社のケーススタディをご覧になり、当社の慣性ソリューションがお客様のプロジェクトをどのように向上させ、優れた結果を達成できるかをご確認ください。





SBG Systemsについて
SBG Systemsの技術を採用したイノベーターやクライアントからの直接の声をお聞きください。
当社のセンサーが、実際のUGVナビゲーションアプリケーションに大きな影響を与えていることは、お客様の声や成功事例が物語っています。
その他の無人システムアプリケーションを見る
陸、海、空の無人プラットフォームにおける慣性システムの多様なアプリケーションをご紹介します。自律走行車やUAVから、水中ドローンや水上艇まで、SBG Systemsの技術は、最も困難な環境下でも正確なナビゲーション、安定性、および制御を保証します。
ご質問はありますか?
GNSS と GPS の違いとは?
GNSSはGlobal Navigation Satellite Systemの略であり、GPSはGlobal Positioning Systemの略です。これらの用語はしばしば混同して使用されますが、衛星測位システム内では異なる概念を指します。
GNSSは全ての衛星測位システムの総称であり、GPSは特に米国のシステムを指します。GNSSはより包括的なグローバルカバレッジを提供する複数のシステムを含みますが、GPSはそのシステムの一つに過ぎません。
GNSSを使用すると、複数のシステムからのデータを統合することで、精度と信頼性が向上します。GPS単独では、衛星の利用可能性や環境条件によっては制限がある場合があります。
ジャミングとスプーフィングとはどういう意味ですか?
スプーフィング 、以下のような衛星航法システムの信頼性や精度に重大な影響を及ぼす可能性のある2種類のスプーフィング 。 GNSSのような衛星航法システムの信頼性と精度に重大な影響を及ぼす可能性のある2つの干渉形態です。
ジャミング 、GNSS 使用する周波数帯で干渉信号を送信することにより、衛星信号を意図的に妨害することをジャミング 。この干渉により、正規の衛星信号が圧倒されたりかき消されたりし、GNSS 情報を正確に処理できなくなることがあります。ジャミング 、敵の航法能力を妨害するために軍事作戦で一般的にジャミング 、民間システムにも影響を及ぼし、航法機能の障害や運用上の課題を引き起こす可能性があります。
一方、スプーフィング、GNSS 模倣した偽の信号を送信することを指します。こうした偽の信号により、GNSS 誤った位置や時刻を算出してしまう可能性があります。スプーフィング 、ナビゲーションシステムを誤った方向に誘導したり、誤った情報を与えたりするためにスプーフィング 、車両や航空機がコースを外れたり、誤った位置データが提供されたりする原因となるスプーフィング 。単に信号の受信を妨げるだけのジャミング異なり、スプーフィング 偽の情報を正当なものとして提示することで、受信機をスプーフィング 欺きます。
ジャミングとスプーフィングは、GNSSに依存するシステムの完全性に対し、重大な脅威をもたらします。そのため、妨害のある環境や困難な状況下での信頼性の高い運用を確保するためには、高度な対抗策とレジリエントな測位技術が不可欠となります。
慣性航法とは?
慣性航法とは、GPSのような外部信号に依存せず、内部センサーのみを用いて車両の位置、姿勢、運動を決定する手法です。その中核をなす慣性航法システム (INS) は、物体の3次元における加速度と回転を継続的に追跡することで、その動きを測定します。IMU(慣性計測ユニット)を使用しており、これには線形加速度を検出する加速度計と、角速度を測定するジャイロスコープが含まれています。これらの測定値を時間積分することで、システムは速度、姿勢、そして最終的には既知の出発点を基準とした位置を算出します。
完全に自己完結型であるため、慣性航法は、地下、水中、宇宙空間、またはGPSが利用できない環境など、あらゆる環境で機能します。これにより、ミサイル、航空機、潜水艦、自律走行車、ロボット工学などの用途に不可欠なものとなっています。現代のINSソリューションは、ドリフトを低減し、長期的な精度を向上させるために、慣性センサーとGNSS受信機、磁力計、気圧計、またはドップラー速度ログなどの追加の補助情報源を組み合わせることがよくあります。高性能INSは、最も要求の厳しい環境においても、安定した信頼性の高い航法データを提供するために、精密なセンサー校正、高度なフィルタリングアルゴリズム、および堅牢な誤差モデリングに依存しています。
