Ciągłość nawigacji podczas przerw w dostępie do GNSS
Nasze rozwiązania nawigacyjne oferują szereg korzyści dla bezzałogowych pojazdów lądowych (Unmanned Ground Vehicles - UGV), szczególnie w trudnych środowiskach, gdzie inne technologie nawigacyjne mogą zawieść.
Twoje UGV mogą teraz efektywnie działać w środowiskach, w których sygnały GNSS są niedostępne, zawodne lub celowo zakłócane (np. w wąwozach miejskich, tunelach podziemnych lub na spornych polach bitew). Jest to kluczowe dla misji ratunkowych i obronnych, gdzie zakłócenia GNSS mogą negatywnie wpłynąć na dokładność nawigacji UGV.
Dzięki naszym rozwiązaniom nawigacyjnym, Twój UGV otrzymuje nieprzerwane dane nawigacyjne bez polegania na zewnętrznych źródłach odniesienia, takich jak GNSS. Umożliwia to UGV utrzymanie świadomości sytuacyjnej i autonomii, nawet gdy komunikacja lub sygnały zewnętrzne zostaną utracone.

Wysoka precyzja w dynamicznych środowiskach
Nasze systemy nawigacyjne nieustannie zbierają dane w czasie rzeczywistym dotyczące pozycji pojazdu, jego prędkości i orientacji (roll, pitch, yaw), umożliwiając precyzyjne sterowanie nawet w wysoce dynamicznych środowiskach, takich jak nierówny teren lub warunki terenowe.
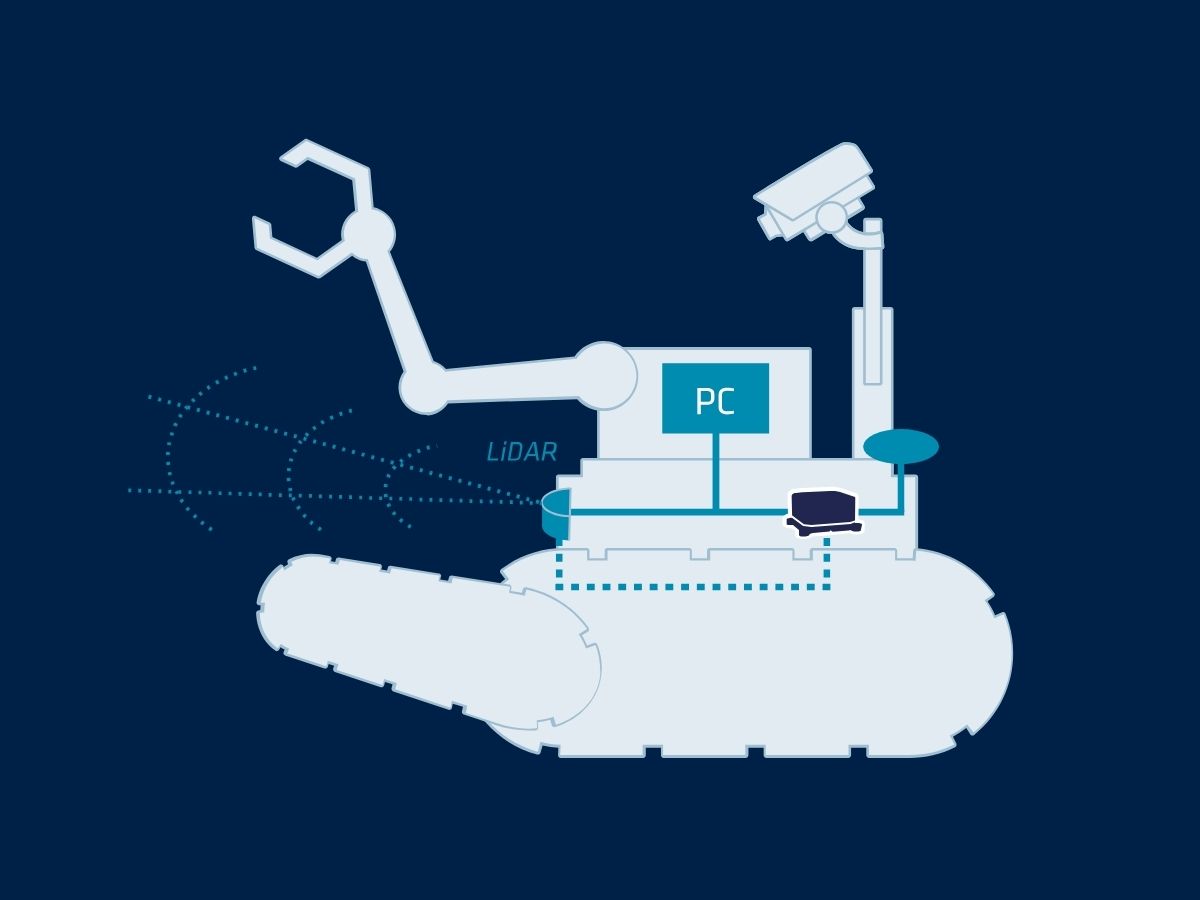
Precyzja naszych czujników zapewnia niezawodne działanie w złożonych i szybko zmieniających się środowiskach. Aby zwiększyć ilość danych o lokalizacji pojazdu, możesz zintegrować nasz INS z innymi czujnikami pokładowymi, takimi jak kamery, LiDAR i odometria, tworząc wielosensorowy system nawigacyjny. Ta fuzja czujników poprawia ogólną dokładność lokalizacji i świadomość sytuacyjną.
Dodatkowo, oferują one wysoce niezawodne dane nawigacyjne, zmniejszając ryzyko kolizji lub niepowodzenia misji. Jest to szczególnie ważne w operacjach wojskowych lub niebezpiecznych środowiskach, gdzie bezpieczeństwo jest najważniejsze.
Wytrzymałość w trudnych warunkach
Bezzałogowy pojazd lądowy często działa w ekstremalnych środowiskach (takich jak pustynie, lasy lub strefy katastrof), gdzie czynniki środowiskowe, takie jak kurz, pogoda lub zakłócenia elektromagnetyczne, mogą wpływać na inne systemy nawigacyjne.
Nasze rozwiązania są wysoce odporne na takie warunki, zapewniając niezawodne działanie. Dostarczając wysoce dokładne dane dotyczące orientacji i pozycjonowania, nasze czujniki zwiększają zdolność UGV do autonomicznego planowania i podążania złożonymi ścieżkami, minimalizując interwencję człowieka.
Ta zdolność poprawia efektywność operacyjną w obronności, logistyce i zastosowaniach przemysłowych.

Wybór produktów
Nasze rozwiązania integrują się bezproblemowo z platformami UGV, zapewniając niezawodne działanie nawet w najtrudniejszych warunkach.

Ellipse-A

Ellipse-E

Ellipse-N

Ellipse-D

Ekinox Micro
Ulotka dotycząca zastosowań w obronności
Otrzymaj naszą broszurę bezpośrednio na swoją skrzynkę odbiorczą!
Studia przypadków
Poznaj historie sukcesu naszych inercyjnych rozwiązań dla UGV. Dowiedz się o znaczącym wpływie naszych zaawansowanych systemów nawigacyjnych na operacje UGV w wielu branżach.
W każdym studium przypadku analizujemy konkretne przykłady, które ujawniają, jak nasze zaawansowane czujniki inercyjne i technologia GNSS konsekwentnie zapewniają niezrównaną dokładność, niezawodność i wydajność w praktycznych sytuacjach. Uzyskaj szczegółowe informacje i praktyczne przykłady, jak nasze rozwiązania radzą sobie ze złożonymi wyzwaniami i napędzają doskonałość operacyjną.
Zapoznaj się z naszymi studiami przypadku, aby zobaczyć, jak nasze rozwiązania inercyjne mogą podnieść poziom Twoich projektów i osiągnąć wyjątkowe wyniki.


Łazik marsjański Mc Gills integruje system nawigacji inercyjnej SBG Systems
Robotyka
Wykrywanie uszkodzeń szyn przez firmę TREALIS przy użyciuNavsight Apogee Navsight
Pozycjonowanie tramwajów i pociągów


Oni o nas mówią
Posłuchaj z pierwszej ręki innowatorów i klientów, którzy wdrożyli naszą technologię.
Ich referencje i historie sukcesu ilustrują znaczący wpływ, jaki nasze czujniki mają w praktycznych zastosowaniach nawigacyjnych UGV.
Odkryj inne zastosowania systemów bezzałogowych
Poznaj różnorodne zastosowania systemów inercyjnych na platformach bezzałogowych na lądzie, morzu i w powietrzu. Od autonomicznych pojazdów lądowych i UAV po drony podwodne i jednostki nawodne, nasze technologie zapewniają precyzyjną nawigację, stabilność i kontrolę nawet w najtrudniejszych środowiskach.
Masz pytania?
Co to jest GNSS a GPS?
GNSS oznacza Globalny System Nawigacji Satelitarnej, a GPS Globalny System Pozycjonowania. Terminy te są często używane zamiennie, ale odnoszą się do różnych koncepcji w ramach satelitarnych systemów nawigacyjnych.
GNSS to zbiorcze określenie wszystkich satelitarnych systemów nawigacyjnych, natomiast GPS odnosi się konkretnie do systemu amerykańskiego. Obejmuje wiele systemów, które zapewniają bardziej kompleksowy zasięg globalny, podczas gdy GPS jest tylko jednym z tych systemów.
Dzięki integracji danych z wielu systemów uzyskujesz lepszą dokładność i niezawodność dzięki GNSS, podczas gdy sam GPS może mieć ograniczenia w zależności od dostępności satelitów i warunków środowiskowych.
Co oznaczają zakłócanie i spoofing?
Zakłócanie i spoofing to dwa rodzaje zakłóceń, które mogą znacząco wpłynąć na niezawodność i dokładność systemów nawigacji satelitarnej, takich jak GNSS.
Zakłócanie odnosi się do celowego zakłócania sygnałów satelitarnych poprzez nadawanie sygnałów zakłócających na tych samych częstotliwościach, które są używane przez systemy GNSS. Zakłócenia te mogą zagłuszać lub tłumić legalne sygnały satelitarne, uniemożliwiając odbiornikom GNSS dokładne przetwarzanie informacji. Zakłócanie jest powszechnie stosowane w operacjach wojskowych w celu zakłócenia zdolności nawigacyjnych przeciwników, a także może wpływać na systemy cywilne, prowadząc do awarii nawigacji i wyzwań operacyjnych.
Z drugiej strony, spoofing polega na transmisji fałszywych sygnałów, które naśladują oryginalne sygnały GNSS. Te zwodnicze sygnały mogą wprowadzać odbiorniki GNSS w błąd, powodując obliczanie nieprawidłowych pozycji lub czasów. Spoofing może być używany do wprowadzania w błąd systemów nawigacyjnych, potencjalnie powodując zbaczanie pojazdów lub samolotów z kursu lub dostarczanie fałszywych danych o lokalizacji. W przeciwieństwie do zakłócania, które jedynie utrudnia odbiór sygnału, spoofing aktywnie oszukuje odbiornik, prezentując fałszywe informacje jako legalne.
Zarówno zagłuszanie (jamming), jak i podszywanie się (spoofing) stanowią istotne zagrożenie dla integralności systemów bazujących na GNSS, co wymusza zastosowanie zaawansowanych środków zaradczych i odpornych technologii nawigacyjnych w celu zapewnienia niezawodnego działania w środowiskach zakłóconych lub wymagających.
Czym jest nawigacja inercyjna?
Nawigacja inercyjna to metoda określania pozycji, orientacji i ruchu pojazdu wyłącznie za pomocą czujników wewnętrznych, bez polegania na sygnałach zewnętrznych, takich jak GPS. Zasadniczo, system nawigacji inercyjnej (INS) mierzy ruch obiektu poprzez ciągłe śledzenie jego przyspieszenia i rotacji w trzech wymiarach. Wykorzystuje jednostkę pomiaru inercyjnego (IMU), która zawiera akcelerometry do wykrywania przyspieszenia liniowego oraz żyroskopy do pomiaru prędkości kątowej. Poprzez matematyczne całkowanie tych pomiarów w czasie, system oblicza prędkość, orientację i ostatecznie pozycję względem znanego punktu początkowego.
Ponieważ jest całkowicie autonomiczna, nawigacja inercyjna działa w każdym środowisku — pod ziemią, pod wodą, w przestrzeni kosmicznej lub w warunkach braku sygnału GPS — co czyni ją niezbędną w zastosowaniach takich jak pociski, samoloty, łodzie podwodne, pojazdy autonomiczne i robotyka. Nowoczesne rozwiązania INS często łączą czujniki inercyjne z dodatkowymi źródłami wspomagającymi, takimi jak odbiorniki GNSS, magnetometry, barometry lub logi prędkości Dopplera, aby redukować dryf i poprawiać długoterminową dokładność. Wysokowydajne systemy INS opierają się na precyzyjnej kalibracji czujników, zaawansowanych algorytmach filtrowania i solidnym modelowaniu błędów, aby dostarczać stabilne, niezawodne dane nawigacyjne nawet w najbardziej wymagających środowiskach.
