Continuité de la navigation pendant les pannes GNSS
Nos solutions de navigation offrent plusieurs avantages pour les véhicules terrestres sans pilote (UGV), en particulier dans les environnements difficiles où d'autres technologies de navigation peuvent échouer.
Vos UGV peuvent désormais fonctionner efficacement dans des environnements où les signaux GNSS sont indisponibles, peu fiables ou intentionnellement brouillés (par exemple, les canyons urbains, les tunnels souterrains ou les champs de bataille contestés). Ceci est essentiel pour les missions de sauvetage et de défense où les interférences GNSS peuvent compromettre la précision de la navigation de votre UGV.
Grâce à nos solutions de navigation, votre UGV reçoit des données de navigation ininterrompues sans dépendre de références externes telles que le GNSS. Cela permet à votre UGV de maintenir sa conscience de la situation et son autonomie, même en cas de perte de communication ou de signaux externes.

Haute précision dans les environnements dynamiques
Des données en temps réel sont constamment collectées avec nos systèmes de navigation, sur la position, la vitesse et l'orientation (roulis, tangage, lacet) du véhicule, permettant un contrôle précis même dans des environnements très dynamiques, tels que les terrains accidentés ou les conditions hors route.
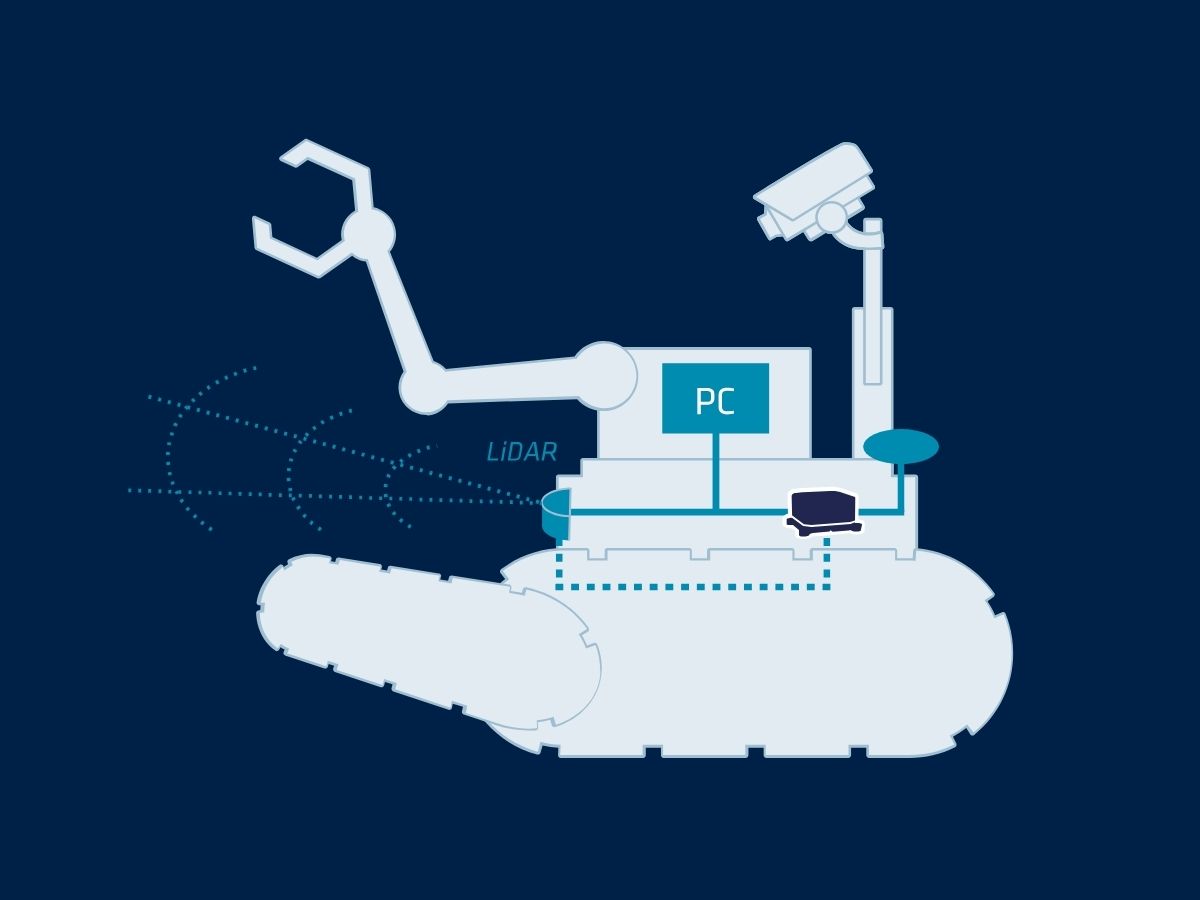
La précision de nos capteurs garantit des performances fiables dans des environnements complexes et en évolution rapide. Pour augmenter les données de localisation du véhicule, vous pouvez intégrer nos INS avec d'autres capteurs embarqués comme des caméras, des LiDAR et l'odométrie pour former un système de navigation multi-capteurs. Cette fusion de capteurs améliore la précision globale de la localisation et la connaissance de la situation.
De plus, ils offrent des données de navigation très fiables, réduisant les risques de collision ou d'échec de mission. Ceci est particulièrement crucial dans les opérations militaires ou les environnements dangereux, où la sécurité est primordiale.
Robustesse dans des conditions difficiles
Un véhicule terrestre autonome fonctionne souvent dans des environnements extrêmes (tels que les déserts, les forêts ou les zones sinistrées) où des facteurs environnementaux comme la poussière, les conditions météorologiques ou les interférences électromagnétiques peuvent affecter d'autres systèmes de navigation.
Nos solutions sont très résistantes à de telles conditions, assurant des performances robustes. En fournissant des données d'orientation et de positionnement très précises, nos capteurs améliorent la capacité d'un UGV à planifier et à suivre de manière autonome des trajectoires complexes, minimisant ainsi l'intervention humaine.
Cette capacité améliore l'efficacité opérationnelle dans les applications de défense, de logistique et industrielles.

Sélection de produits
Nos solutions s'intègrent parfaitement aux plateformes UGV, pour offrir des performances fiables, même dans les conditions les plus difficiles.

Pulse-40

Ellipse-A

Ellipse-E

Ellipse-N

Ellipse-D

Ekinox Micro
Dépliant des applications de défense
Recevez notre brochure directement dans votre boîte de réception !
Études de cas
Explorez les réussites de nos solutions inertielles pour UGV. Découvrez l'impact significatif de nos systèmes de navigation avancés sur les opérations des UGV dans de nombreux secteurs.
À travers chaque étude de cas, nous examinons des exemples concrets qui révèlent comment nos capteurs inertiels avancés et la technologie GNSS ont constamment fourni une précision, une fiabilité et des performances inégalées dans des situations pratiques. Obtenez des informations détaillées et des exemples pratiques de la manière dont nos solutions relèvent des défis complexes et stimulent l'excellence opérationnelle.
Plongez dans nos études de cas pour voir comment nos solutions inertielles peuvent améliorer vos projets et obtenir des résultats exceptionnels.


Le Rover Martien Mc Gills Intègre le Système de Navigation Inertielle SBG
Robotique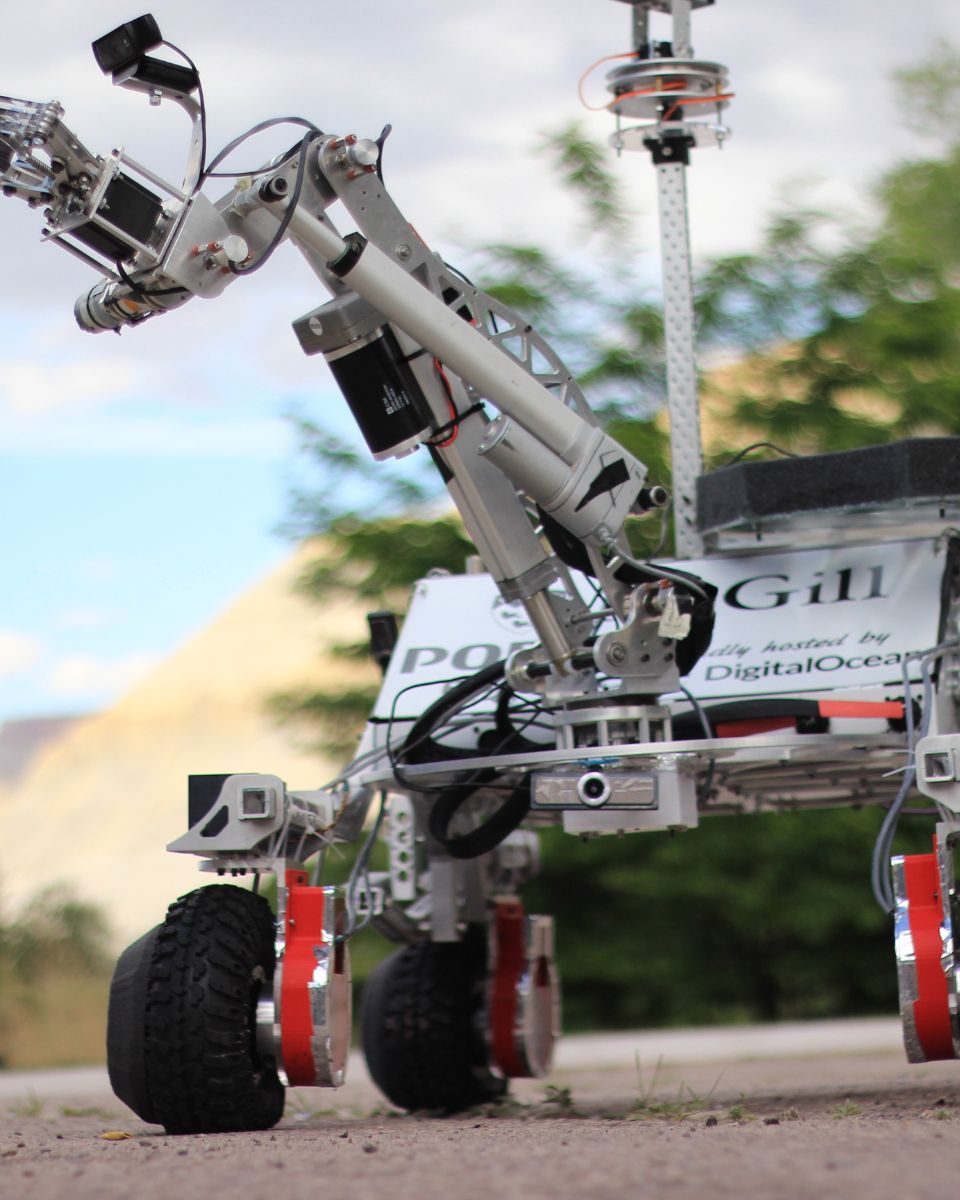
Comment Ellipse a aidé un bateau à énergie solaire à participer à la course de Monaco
Bateau à énergie solaire


Ils parlent de nous
Écoutez directement les témoignages des innovateurs et des clients qui ont adopté notre technologie.
Leurs témoignages et leurs réussites illustrent l'impact significatif de nos capteurs dans les applications pratiques de navigation des UGV.
Découvrez d'autres applications de systèmes autonomes
Explorez les diverses applications des systèmes inertiels dans les plateformes sans pilote terrestres, maritimes et aériennes. Des véhicules terrestres autonomes et des UAV aux drones sous-marins et aux navires de surface, nos technologies garantissent une navigation, une stabilité et un contrôle précis, même dans les environnements les plus difficiles.
Vous avez des questions ?
Quelle est la différence entre GNSS et GPS ?
Le GNSS signifie Système Mondial de Navigation par Satellite et le GPS signifie Système de Positionnement Global. Ces termes sont souvent employés indifféremment, mais ils désignent des concepts distincts au sein des systèmes de navigation par satellite.
Le GNSS est un terme générique désignant l'ensemble des systèmes de navigation par satellite, tandis que le GPS fait spécifiquement référence au système américain. Il inclut plusieurs systèmes qui offrent une couverture mondiale plus complète, alors que le GPS n'est qu'un de ces systèmes.
Vous bénéficiez d'une précision et d'une fiabilité accrues avec GNSS, en intégrant les données de plusieurs systèmes, alors que GPS seul peut avoir des limitations en fonction de la disponibilité des satellites et des conditions environnementales.
Que signifient brouillage et spoofing ?
Le brouillage et l'usurpation sont deux types d'interférences qui peuvent affecter considérablement la fiabilité et la précision des systèmes de navigation par satellite comme le GNSS.
Le brouillage fait référence à la perturbation intentionnelle des signaux satellites par la diffusion de signaux d'interférence sur les mêmes fréquences que celles utilisées par les systèmes GNSS. Cette interférence peut submerger ou noyer les signaux satellites légitimes, rendant les récepteurs GNSS incapables de traiter l'information avec précision. Le brouillage est couramment utilisé dans les opérations militaires pour perturber les capacités de navigation des adversaires, et il peut également affecter les systèmes civils, entraînant des défaillances de navigation et des défis opérationnels.
L'usurpation, d'autre part, implique la transmission de signaux contrefaits qui imitent les signaux GNSS authentiques. Ces signaux trompeurs peuvent induire les récepteurs GNSS en erreur en leur faisant calculer des positions ou des heures incorrectes. L'usurpation peut être utilisée pour détourner ou désinformer les systèmes de navigation, ce qui peut amener les véhicules ou les aéronefs à dévier de leur trajectoire ou à fournir de fausses données de localisation. Contrairement au brouillage, qui ne fait qu'empêcher la réception des signaux, l'usurpation trompe activement le récepteur en présentant de fausses informations comme légitimes.
Le brouillage et le spoofing représentent des menaces importantes pour l'intégrité des systèmes dépendants du GNSS, nécessitant des contre-mesures avancées et des technologies de navigation résilientes pour assurer un fonctionnement fiable dans des environnements contestés ou difficiles.
Qu'est-ce que la navigation inertielle ?
La navigation inertielle est une méthode permettant de déterminer la position, l'orientation et le mouvement d'un véhicule en utilisant uniquement des capteurs internes, sans dépendre de signaux externes comme le GPS. À la base, un système de navigation inertielle (INS) mesure le déplacement d'un objet en suivant continuellement son accélération et sa rotation dans les trois dimensions. Il utilise une centrale inertielle (IMU), qui contient des accéléromètres pour détecter l'accélération linéaire et des gyroscopes pour mesurer la vitesse angulaire. En intégrant mathématiquement ces mesures au fil du temps, le système calcule la vitesse, l'attitude et, finalement, la position par rapport à un point de départ connu.
Étant entièrement autonome, la navigation inertielle fonctionne dans n'importe quel environnement — sous terre, sous l'eau, dans l'espace ou dans des conditions de déni de GPS — la rendant indispensable pour des applications telles que les missiles, les aéronefs, les sous-marins, les véhicules autonomes et la robotique. Les solutions INS modernes combinent souvent des capteurs inertiels avec des sources d'aide supplémentaires, telles que les récepteurs GNSS, les magnétomètres, les baromètres ou les logs de vitesse Doppler, afin de réduire la dérive et d'améliorer la précision à long terme. Les INS haute performance s'appuient sur un étalonnage précis des capteurs, des algorithmes de filtrage avancés et une modélisation robuste des erreurs pour fournir des données de navigation stables et fiables, même dans les environnements les plus exigeants.
