Continuidade da navegação durante interrupções do GNSS
Nossas soluções de navegação oferecem diversas vantagens para Veículos Terrestres Não Tripulados (UGVs), especialmente em ambientes desafiadores onde outras tecnologias de navegação podem falhar.
Seus UGVs agora podem operar efetivamente em ambientes onde os sinais de GNSS não estão disponíveis, não são confiáveis ou são intencionalmente bloqueados (por exemplo, cânions urbanos, túneis subterrâneos ou campos de batalha contestados). Isso é fundamental para missões de resgate e defesa onde a interferência do GNSS pode comprometer a precisão da navegação do seu UGV.
Graças às nossas soluções de navegação, seu UGV recebe dados de navegação ininterruptos sem depender de referências externas como o GNSS. Isso permite que seu UGV mantenha a consciência situacional e a autonomia, mesmo quando as comunicações ou sinais externos são perdidos.

Alta precisão em ambientes dinâmicos
Dados em tempo real são constantemente coletados com nossos sistemas de navegação, sobre a posição, velocidade e orientação (roll, pitch, yaw) do veículo, permitindo um controle preciso, mesmo em ambientes altamente dinâmicos, como terrenos acidentados ou condições off-road.
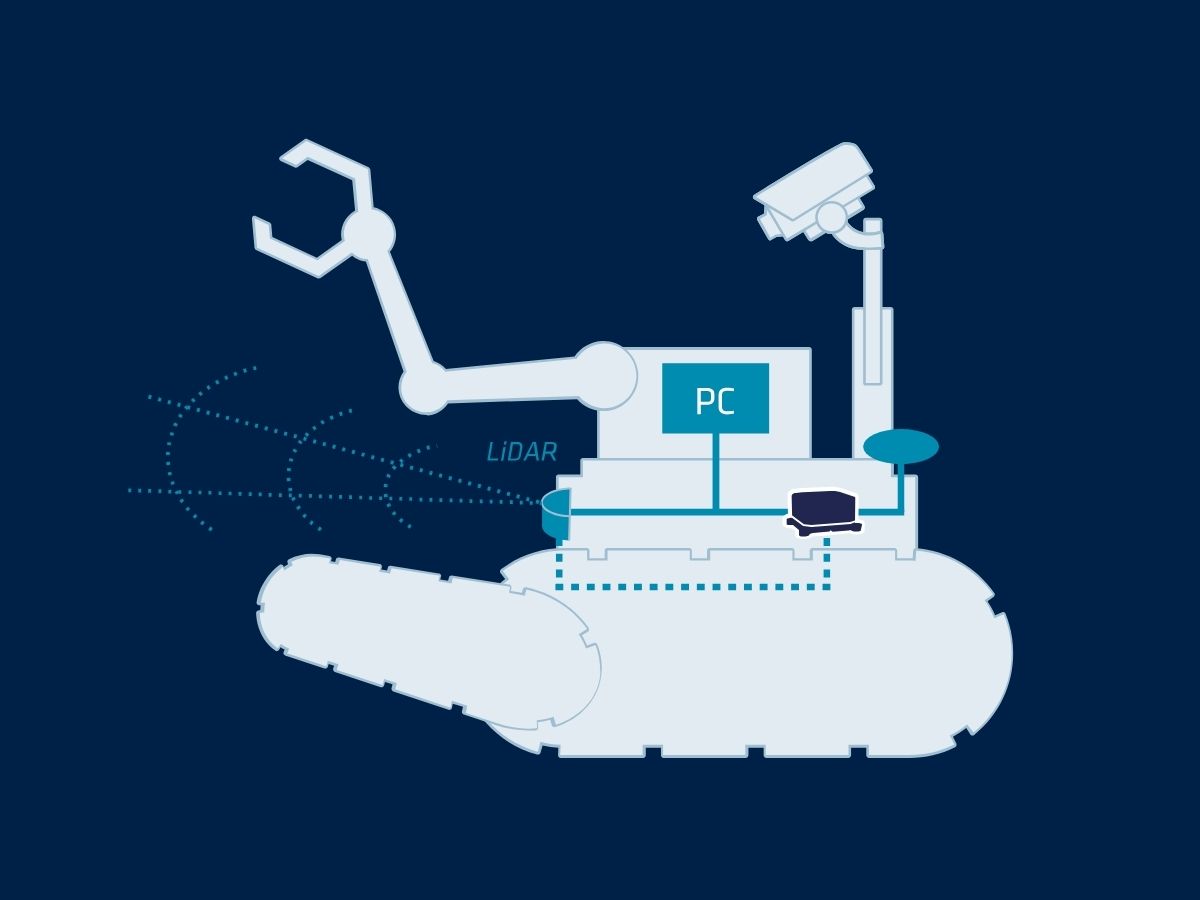
A precisão de nossos sensores garante um desempenho confiável em ambientes complexos e em rápida mudança. Para aumentar os dados de localização do veículo, você pode integrar nosso INS com outros sensores de bordo, como câmeras, LiDAR e odometria, para formar um sistema de navegação multi-sensor. Essa fusão de sensores melhora a precisão geral da localização e o conhecimento situacional.
Além disso, eles oferecem dados de navegação altamente confiáveis, reduzindo as chances de colisão ou falha na missão. Isso é particularmente crucial em operações militares ou ambientes perigosos, onde a segurança é fundamental.
Robustez em condições adversas
Um veículo terrestre autônomo geralmente opera em ambientes extremos (como desertos, florestas ou zonas de desastre) onde fatores ambientais como poeira, clima ou interferência eletromagnética podem afetar outros sistemas de navegação.
Nossas soluções são altamente resistentes a tais condições, garantindo um desempenho robusto. Ao fornecer dados de orientação e posicionamento altamente precisos, nossos sensores aprimoram a capacidade de um UGV de planejar e seguir autonomamente caminhos complexos, minimizando a intervenção humana.
Essa capacidade melhora a eficiência operacional em aplicações de defesa, logística e industriais.

Seleção de produtos
Nossas soluções se integram perfeitamente com plataformas UGV, para fornecer desempenho confiável, mesmo nas condições mais desafiadoras.

Ellipse-A

Ellipse-E

Ellipse-N

Ellipse-D

Ekinox Micro
Panfleto de aplicações de defesa
Receba nossa brochura de aplicações de defesa diretamente em sua caixa de entrada!
Estudos de caso
Explore as histórias de sucesso por trás de nossas soluções inerciais para UGV. Saiba mais sobre o impacto significativo de nossos sistemas de navegação avançados nas operações de UGV em vários setores.
Através de cada estudo de caso, examinamos exemplos tangíveis que revelam como nossos sensores inerciais avançados e a tecnologia GNSS têm fornecido consistentemente precisão, confiabilidade e desempenho incomparáveis em situações práticas. Obtenha insights detalhados e exemplos práticos de como nossas soluções enfrentam desafios complexos e impulsionam a excelência operacional.
Mergulhe em nossos estudos de caso para ver como nossas soluções inerciais podem elevar seus projetos e alcançar resultados notáveis.
Ellipse-A escolhido para rockbreakers operados remotamente
Sistema de controle automatizado

Detecção de defeitos em trilhos da TREALIS com Apogee Navsight
Posicionamento de bondes e trens


Eles falam sobre nós
Ouça em primeira mão os inovadores e clientes que adotaram nossa tecnologia.
Seus depoimentos e histórias de sucesso ilustram o impacto significativo que nossos sensores têm em aplicações práticas de navegação de UGV.
Descubra outras aplicações de sistemas não tripulados
Explore as diversas aplicações de sistemas inerciais em plataformas não tripuladas em terra, mar e ar. Desde veículos terrestres autônomos e UAVs até drones subaquáticos e embarcações de superfície, nossas tecnologias garantem navegação precisa, estabilidade e controle, mesmo nos ambientes mais desafiadores.
Você tem perguntas?
O que é GNSS vs GPS?
GNSS significa Global Navigation Satellite System e GPS para Global Positioning System. Esses termos são frequentemente usados de forma intercambiável, mas se referem a conceitos distintos dentro dos sistemas de navegação baseados em satélite.
GNSS é um termo coletivo para todos os sistemas de navegação por satélite, enquanto o GPS se refere especificamente ao sistema dos EUA. Ele abrange múltiplos sistemas que fornecem uma cobertura global mais abrangente, enquanto o GPS é apenas um desses sistemas.
Você obtém maior precisão e confiabilidade com o GNSS, integrando dados de vários sistemas, enquanto o GPS sozinho pode ter limitações dependendo da disponibilidade de satélites e das condições ambientais.
O que significam jamming e spoofing?
Jamming e spoofing são dois tipos de interferência que podem afetar significativamente a confiabilidade e a precisão de sistemas de navegação baseados em satélite, como o GNSS.
Jamming refere-se à interrupção intencional de sinais de satélite através da transmissão de sinais de interferência nas mesmas frequências usadas pelos sistemas GNSS. Essa interferência pode sobrecarregar ou abafar os sinais de satélite legítimos, tornando os receptores GNSS incapazes de processar as informações com precisão. O jamming é comumente usado em operações militares para interromper as capacidades de navegação dos adversários, e também pode afetar sistemas civis, levando a falhas de navegação e desafios operacionais.
O spoofing, por outro lado, envolve a transmissão de sinais falsificados que imitam sinais GNSS genuínos. Esses sinais enganosos podem induzir os receptores GNSS a calcular posições ou horários incorretos. O spoofing pode ser usado para desviar ou desinformar sistemas de navegação, potencialmente fazendo com que veículos ou aeronaves saiam do curso ou fornecendo dados de localização falsos. Ao contrário do jamming, que meramente obstrui a recepção do sinal, o spoofing engana ativamente o receptor, apresentando informações falsas como legítimas.
Tanto o jamming quanto o spoofing representam ameaças significativas à integridade de sistemas dependentes de GNSS, exigindo contramedidas avançadas e tecnologias de navegação resilientes para garantir uma operação confiável em ambientes contestados ou desafiadores.
O que é navegação inercial?
Navegação inercial é um método para determinar a posição, orientação e movimento de um veículo utilizando apenas sensores internos, sem depender de sinais externos como GPS. Em sua essência, um sistema de navegação inercial (INS) mede como um objeto se move rastreando continuamente sua aceleração e rotação em três dimensões. Ele utiliza uma Unidade de Medição Inercial (IMU), que contém acelerômetros para detectar aceleração linear e giroscópios para medir a taxa angular. Ao integrar matematicamente essas medições ao longo do tempo, o sistema calcula velocidade, atitude e, eventualmente, posição em relação a um ponto de partida conhecido.
Por ser inteiramente autocontida, a navegação inercial funciona em qualquer ambiente — subterrâneo, subaquático, no espaço ou em condições de ausência de GPS — tornando-a indispensável para aplicações como mísseis, aeronaves, submarinos, veículos autônomos e robótica. Soluções modernas de INS frequentemente combinam sensores inerciais com fontes de auxílio adicionais, como receptores GNSS, magnetômetros, barômetros ou Doppler velocity logs, para reduzir a deriva e melhorar a precisão a longo prazo. INS de alto desempenho dependem de calibração precisa de sensores, algoritmos de filtragem avançados e modelagem robusta de erros para fornecer dados de navegação estáveis e confiáveis mesmo nos ambientes mais exigentes.
