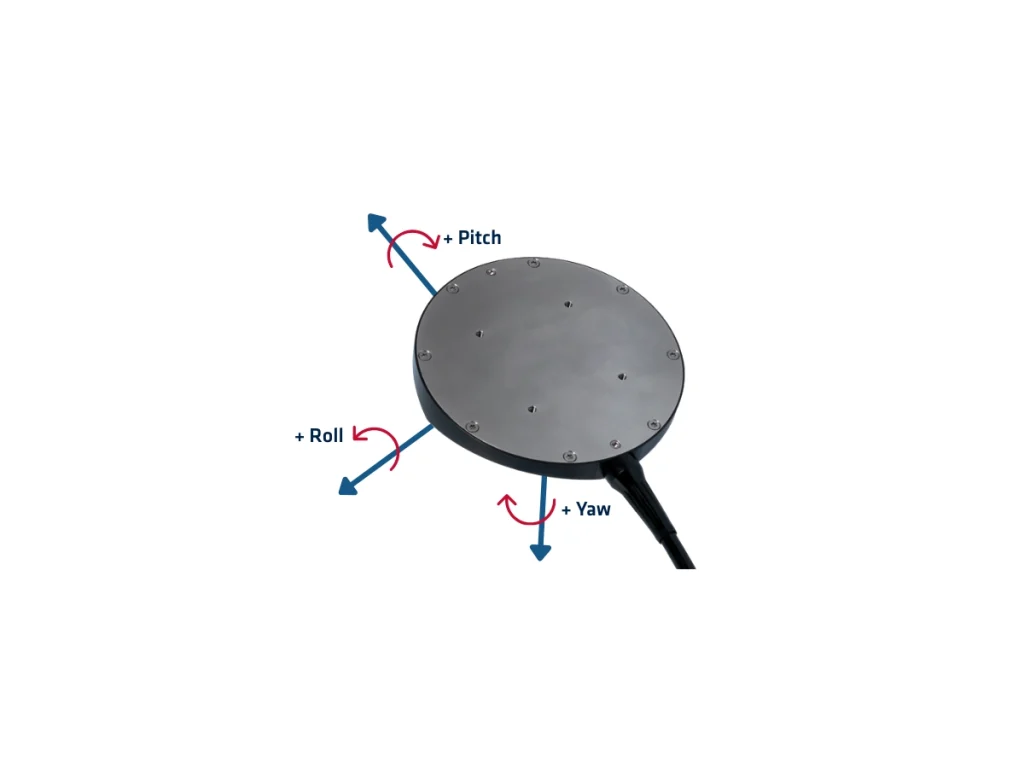
ドップラー速度計(DVL)は、海底または水柱に対する水中車両の速度を測定するために使用される音響センサーです。トランスデューサーから下方または外側に向けて音波を発することで動作します。これらの音響Pulseは、海底または水中の浮遊粒子に反射してセンサーに戻ります。システムはその後、発信信号と受信信号間の周波数変化であるドップラーシフトを計算し、車両の3次元(サージ、スウェイ、ヒーブ)速度を決定します。
DVLは、特にGNSS信号が利用できない水中ナビゲーションにおいて不可欠です。DVLは、時間の経過とともに速度を統合することで、位置の推定、動きの追跡、安定したコースの維持を支援します。これらは、自律型無人潜水機(AUV)、遠隔操作無人潜水機(ROV)、および有人潜水艇で一般的に使用されています。これらのセンサーは、海洋研究、海底測量、オフショアインフラ設置、パイプライン検査などの用途でも広く使用されています。高精度DVLは、特に困難な環境において、精度と堅牢性を向上させるために慣性航法システム(INS)と統合されることがよくあります。
総じて、DVL は重要な航法データDVL 、浅海および深海での任務において、水中システムの確実な運用と操縦を可能にします。
DVL どのようにDVL ?
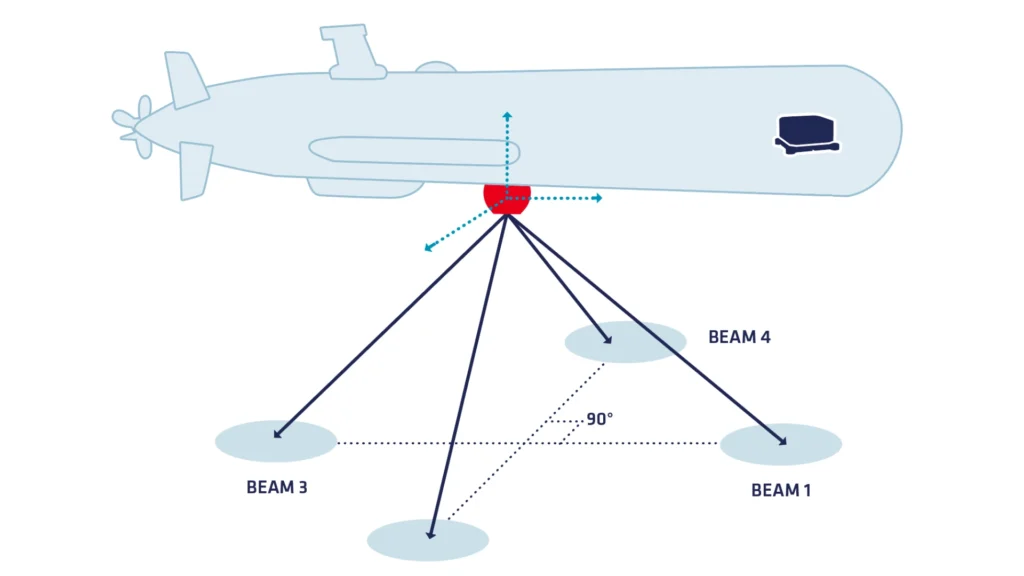
DVL 重要性を理解するには、まずそれが何であり、どのように機能するのかを探ることが重要です。基本的に、DVL 、海底や水柱に対する水中航行体の速度を測定する音響航法装置です。これは、下向きに角度を付けた複数のトランスデューサーから音波を放射することで機能します。
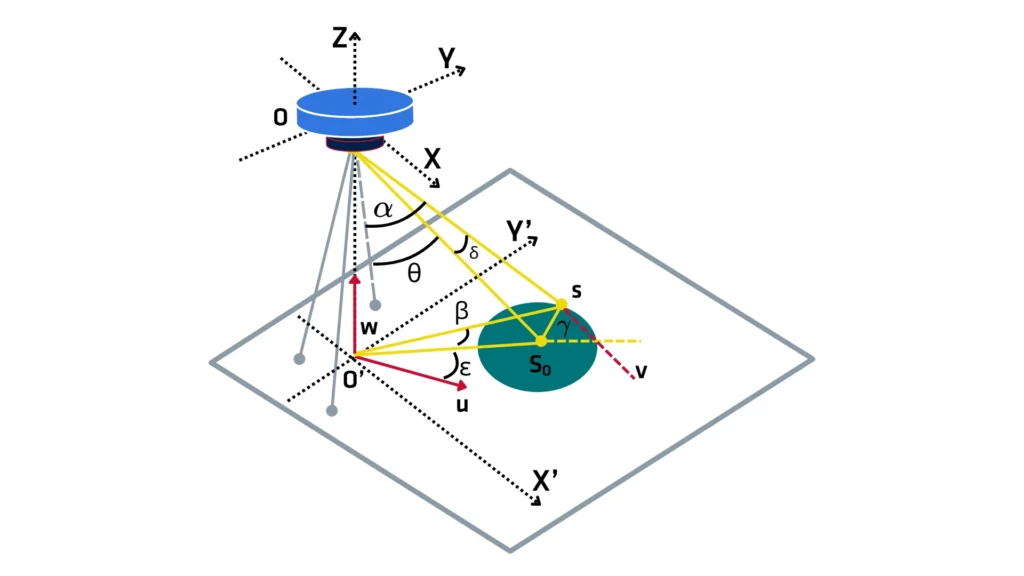
センサーは、海底や水中の粒子に反射して戻ってくる波を発信し、発信波と受信波間の周波数シフト(ドップラーシフト)を分析することで、速度を測定します。
センサーアーキテクチャ
DVLセンサーのアーキテクチャをさらに詳しく見ると、いくつかの主要な構成要素が含まれています。トランスデューサーは音響Pulseの送受信器として機能し、測定プロセスの基礎を形成します。内蔵プロセッサはドップラーシフトを解釈し、得られる速度ベクトルを算出します。さらに、耐久性のあるハウジングが内部のすべての電子機器を過酷な水中環境から保護し、長期的な運用と信頼性を確保します。最後に、データインターフェースはDVLを、慣性航法システム (INS) や内蔵データロガーなどの外部システムに接続し、複雑な水中プラットフォームへのシームレスな統合を可能にします。
さらに、DVL 単に速度を測定するだけでなく、包括的な水中航行ソリューションにおいて不可欠な役割を果たしています。DVL 、継続的に収集された速度データを統合することで、車両の位置を推定します。これは、任務遂行中に正確な軌道を維持するためにこうしたセンサーに依存する自律型水中車両(AUV)や遠隔操作型水中車両(ROV)にとって、特に有用です。
ナビゲーションにおけるDVLの利点
DVLは、航行(ナビゲーション)に加えて、水中測量およびマッピングにおいて不可欠です。DVLセンサーは、リアルタイムで高分解能の速度データを提供し、高精度な追跡と測位をサポートします。この高精度な測位は、海底マッピング、インフラ検査、および環境モニタリングに不可欠です。測量士はDVLデータを使用して正確な海底地形図を作成し、海底資産を特定します。さらに、海底の堆積物移動を監視します。
また、DVLセンサーは海洋学研究においても重要な用途があります。科学者はDVLセンサーを用いて、海流速度の測定、堆積物輸送パターンの分析、海洋生物の行動研究を行います。DVLを搭載したプラットフォームを戦略的な場所に配置することで、研究者は海洋力学や気候変動に関する理解を深める貴重な長期データセットを収集できます。
ドップラー速度ログセンサーのアプリケーション
産業用途へと目を向けると、DVL 海洋石油・ガス分野で広く活用されています。この分野では、特にパイプライン、坑口、ライザーなどの海底インフラの設置や保守を行う際、正確な航行と測位が極めて重要です。DVL 、深海で複雑な作業を行う水中ロボットの精密な制御を可能にし、安全性と運用効率の両方を向上させます。
技術的な観点から見ると、いくつかの重要な進歩が、DVL 性能と信頼性を保証しています。 高周波音響トランスデューサーは短距離タスクにおいて卓越した分解能を提供し、一方、低周波数は長距離測定を可能にします。高度な信号処理アルゴリズムは、環境ノイズを除去し、水中の音波伝播に大きな影響を与える塩分濃度、温度、圧力の変化を補正することで、性能をさらに向上させます。
さらに、DVL INS GNSS と連携して動作します。これらを組み合わせることで、信号の喪失や環境要因による妨害に耐性のある堅牢な航法機能を実現します。このような冗長性は、長期ミッションや、外部の位置情報参照が利用できない深海環境において極めて重要です。
重要な点として、測定精度を維持するためには、定期的な校正と環境補償の手順が不可欠です。 技術者は、変化する環境条件を考慮してセンサーを定期的に調整し、幅広いミッションや運用環境においてデータの完全性を確保しなければなりません。
結論として、DVL 現代の水中作業の基盤となっています。これらは信頼性の高い航法を実現し、科学探査を支援し、産業のワークフローを改善し、海底マッピングの精度を高めます。音響技術とデータ処理が進化し続ける中、DVL 進化を続け、海の謎を解き明かし、海中の重要なインフラを支えるために不可欠なツールであり続けています。
その他のDVL をご覧ください
DVL 、標準的な航行を超えた幅広い海洋作業をどのように支えているかをご紹介します。無人水上艇(USV)から自律型水中艇(AUV)に至るまで、これらの技術は任務の成功に不可欠な正確な速度および位置情報を提供します。海底インフラの点検、海底測量、あるいは科学研究など、どのような用途においても、これらのセンサーは過酷な水上および水中環境下で確かな性能を発揮します。
