Безперебійність навігації під час GNSS
Наші навігаційні рішення мають низку переваг для безпілотних наземних транспортних засобів (UGV), особливо в складних умовах, де інші навігаційні технології можуть виходити з ладу.
Тепер ваші UGV можуть ефективно працювати в умовах, де GNSS недоступні, ненадійні або навмисно заглушуються (наприклад, у міських каньйонах, підземних тунелях або на полях бою). Це має вирішальне значення для рятувальних та оборонних місій, де GNSS можуть знизити точність навігації ваших UGV.
Завдяки нашим навігаційним рішенням ваш безпілотний наземний транспортний засіб отримує безперебійні навігаційні дані, не покладаючись на зовнішні джерела, такі як GNSS. Це дозволяє вашому безпілотному наземному транспортному засобу зберігати ситуаційну обізнаність та автономність навіть у разі втрати зв'язку або зовнішніх сигналів.

Висока точність у динамічних умовах
Наші навігаційні системи постійно збирають дані в режимі реального часу про положення, швидкість та орієнтацію транспортного засобу (roll, pitch, відхилення), що забезпечує точне керування навіть у дуже динамічних умовах, таких як пересічена місцевість або бездоріжжя.
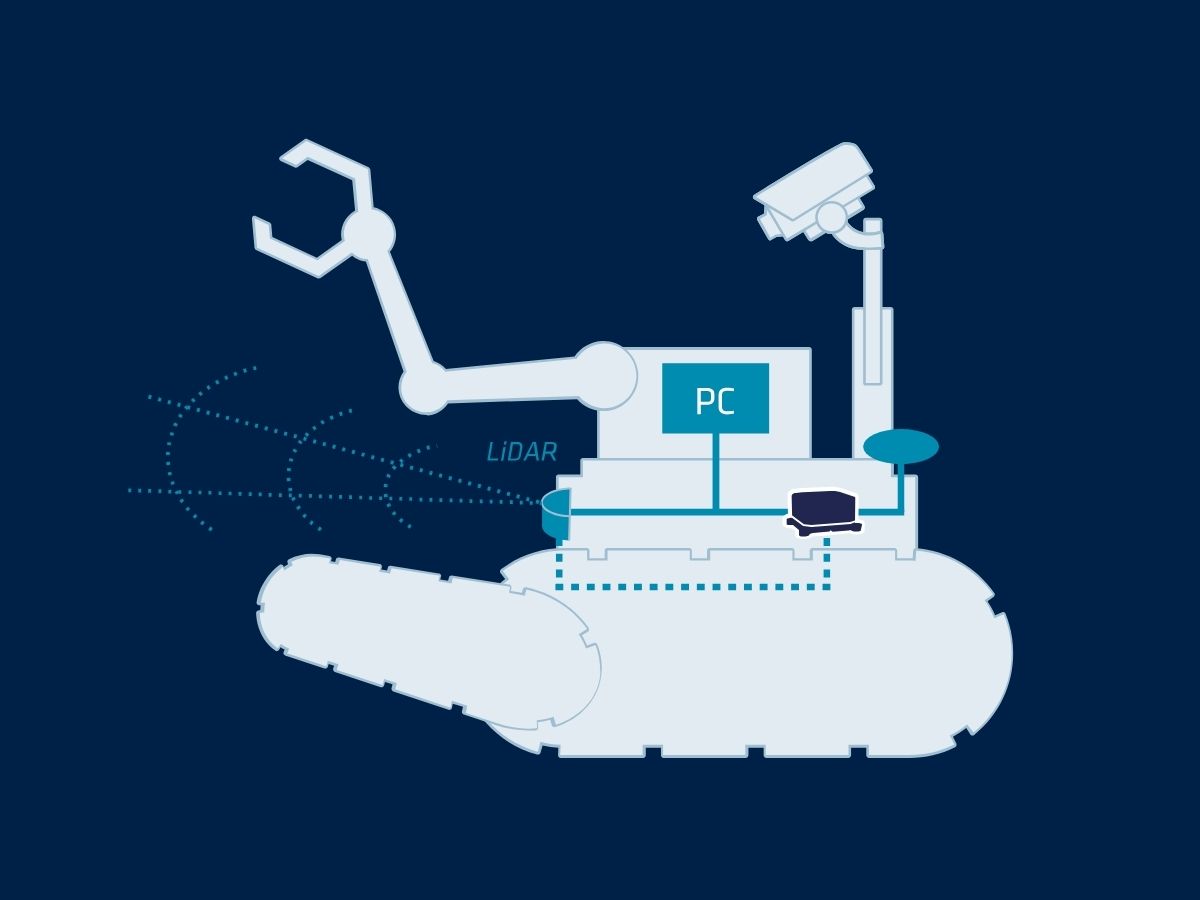
Точність наших датчиків забезпечує надійну роботу в складних і швидкозмінних умовах. Для підвищення точності даних про місцезнаходження транспортного засобу ви можете інтегрувати нашу INS іншими бортовими датчиками, такими як камери, LiDAR та одометрія, щоб сформувати мультисенсорну навігаційну систему. Таке об'єднання датчиків покращує загальну точність локалізації та ситуаційну обізнаність.
Крім того, вони надають надзвичайно надійні навігаційні дані, зменшуючи ймовірність зіткнення або провалу місії. Це особливо важливо під час військових операцій або в небезпечних умовах, де безпека має першочергове значення.
Надійність у суворих умовах
Автономні наземні транспортні засоби часто експлуатуються в екстремальних умовах (таких як пустелі, ліси або зони стихійних лих), де фактори навколишнього середовища, такі як пил, погодні умови або електромагнітні перешкоди, можуть впливати на роботу інших навігаційних систем.
Наші рішення мають високу стійкість до таких умов, забезпечуючи надійну роботу. Надаючи високоточні дані про орієнтацію та позиціонування, наші датчики покращують здатність автономних наземних транспортних засобів (UGV) самостійно планувати та дотримуватися складних маршрутів, мінімізуючи необхідність втручання людини.
Ця здатність підвищує оперативну ефективність у сферах оборони, логістики та промисловості.

Асортимент продукції
Наші рішення безперебійно інтегруються з платформами безпілотних наземних транспортних засобів (UGV), забезпечуючи надійну роботу навіть у найскладніших умовах.

Ellipse

Ellipse-E

Ellipse-N

Ellipse-D

Ekinox Micro
Брошура про застосування в оборонній сфері
Отримайте нашу брошуру прямо на свою електронну пошту!
Приклади застосування
Ознайомтеся з історіями успіху, що стоять за нашими інерційними рішеннями для безпілотних наземних транспортних засобів (UGV). Дізнайтеся про значний вплив наших передових навігаційних систем на роботу UGV у різних галузях промисловості.
У кожному прикладі з практики ми розглядаємо конкретні випадки, які демонструють, як наші сучасні інерційні датчики та GNSS незмінно забезпечують неперевершену точність, надійність та продуктивність у реальних умовах. Отримайте детальну інформацію та практичні приклади того, як наші рішення допомагають вирішувати складні завдання та досягати операційної досконалості.
Ознайомтеся з нашими прикладами з практики, щоб побачити, як наші інерційні рішення можуть покращити ваші проекти та допомогти досягти видатних результатів.
Ellipse обрана для постачання дистанційно керованих гідромолотів
Система автоматичного керування
Ellipse розвитку інновацій у сфері автономних транспортних засобів
Навігація автономних транспортних засобів
Марсохід компанії Mc Gills оснащений інерційною навігаційною системою SBG
Робототехніка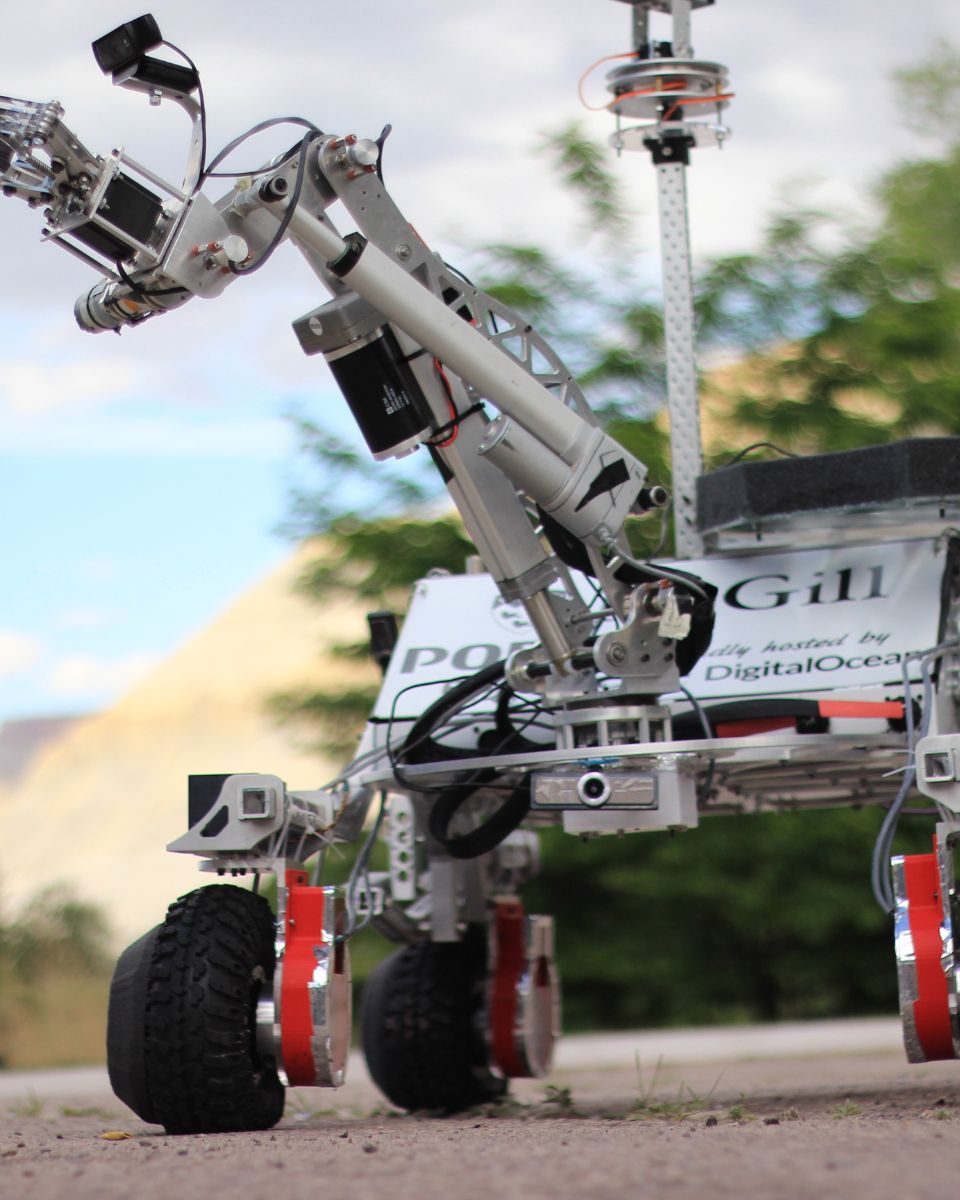
Система виявлення дефектів рейок від TREALIS із використанням Apogee Navsight
Визначення місцезнаходження трамваїв та поїздів


Про нас говорять
Послухайте безпосередньо від новаторів та клієнтів, які вже використовують нашу технологію.
Їхні відгуки та історії успіху свідчать про значний вплив наших датчиків на практичне застосування в навігації безпілотних наземних транспортних засобів.
Дізнайтеся про інші сфери застосування безпілотних систем
Дізнайтеся про різноманітні сфери застосування інерційних систем у безпілотних платформах на суші, на морі та в повітрі. Від автономних наземних транспортних засобів і безпілотних літальних апаратів до підводних дронів і надводних суден — наші технології забезпечують точну навігацію, стабільність та керування навіть у найскладніших умовах.
У вас є питання?
У чому різниця GNSS GPS?
GNSS «Глобальна навігаційна супутникова система», а GPS — «Глобальна система позиціонування». Ці терміни часто вживаються як синоніми, проте вони позначають різні поняття в рамках супутникових навігаційних систем.
GNSS загальний термін, що позначає всі супутникові навігаційні системи, тоді як GPS стосується саме американської системи. До GNSS входять численні системи, що забезпечують більш повне глобальне покриття, тоді як GPS є лише однією з цих систем.
Завдяки GNSS ви отримуєте вищу точність і надійність завдяки об’єднанню даних з декількох систем, тоді як використання лише GPS може мати певні обмеження, що залежать від наявності супутників та умов навколишнього середовища.
Що означають терміни «заглушення» та «спуфінг»?
Заглушення та підробка сигналів — це два види перешкод, які можуть істотно вплинути на надійність і точність супутникових навігаційних систем, таких як GNSS.
Під «заглушенням» розуміється навмисне порушення роботи супутникових сигналів шляхом передачі сигналів-перешкод на тих самих частотах, що використовуються GNSS . Ці перешкоди можуть перекривати або заглушати нормальні супутникові сигнали, внаслідок чого GNSS втрачають здатність точно обробляти інформацію. Заглушення зазвичай застосовується у військових операціях для порушення навігаційних можливостей супротивника, а також може впливати на цивільні системи, що призводить до збоїв у навігації та оперативних ускладнень.
Спуфінг, навпаки, полягає у передачі підроблених сигналів, що імітують справжні GNSS . Ці оманливі сигнали можуть змусити GNSS обчислювати неправильні координати або час. Спуфінг може використовуватися для введення в оману або дезінформації навігаційних систем, що потенційно може призвести до збиття транспортних засобів або літаків з курсу або надання неправдивих даних про місцезнаходження. На відміну від глушіння, яке лише перешкоджає прийому сигналу, спуфінг активно вводить приймач в оману, подаючи неправдиву інформацію як достовірну.
Як заглушення, так і підробка сигналів становлять серйозну загрозу для цілісності систем, GNSS, що вимагає застосування сучасних заходів протидії та відмовостійких навігаційних технологій для забезпечення надійної роботи в умовах військових дій або в складних умовах.
Що таке інерційна навігація?
Інерційна навігація — це метод визначення положення, орієнтації та руху транспортного засобу з використанням виключно внутрішніх датчиків, без опори на зовнішні сигнали, такі як GPS. В основі інерційної навігаційної системи (INS) лежить вимірювання руху об'єкта шляхом безперервного відстеження його прискорення та обертання у трьох вимірах. Вона використовує інерційний вимірювальний блок (IMU), який містить акселерометри для вимірювання лінійного прискорення та гіроскопи для вимірювання кутової швидкості. Шляхом математичної інтеграції цих вимірювань у часі система обчислює швидкість, орієнтацію та, зрештою, положення відносно відомої початкової точки.
Оскільки інерційна навігація є повністю автономною, вона працює в будь-яких умовах — під землею, під водою, у космосі або вdenied — що робить її незамінною для таких застосувань, як ракети, літаки, підводні човни, автономні транспортні засоби та робототехніка. Сучасні INS часто поєднують інерційні датчики з додатковими допоміжними джерелами, такими як GNSS , магнітометри, барометри або доплерівські датчики швидкості, щоб зменшити дрейф і підвищити довгострокову точність. Високоефективні INS базуються на точній калібруванні датчиків, передових алгоритмах фільтрації та надійному моделюванні похибок, щоб забезпечувати стабільні та надійні навігаційні дані навіть у найскладніших умовах.
