Kontinuierliche Navigation bei GNSS-Ausfällen
Unsere Navigationslösungen bieten mehrere Vorteile für unbemannte Landfahrzeuge (UGVs), insbesondere in schwierigen Umgebungen, in denen andere Navigationstechnologien versagen können.
Ihre UGVs können jetzt effektiv in Umgebungen eingesetzt werden, in denen GNSS-Signale nicht verfügbar, unzuverlässig oder absichtlich gestört werden (z. B. Häuserschluchten, unterirdische Tunnel oder umkämpfte Schlachtfelder). Dies ist entscheidend für Rettungs- und Verteidigungsmissionen, bei denen GNSS-Interferenzen die Navigationsgenauigkeit Ihres UGV beeinträchtigen können.
Dank unserer Navigationslösungen erhält Ihr UGV ununterbrochene Navigationsdaten, ohne auf externe Referenzen wie GNSS angewiesen zu sein. Dies ermöglicht Ihrem UGV, die Situationswahrnehmung und Autonomie aufrechtzuerhalten, selbst wenn die Kommunikation oder externe Signale verloren gehen.

Hohe Präzision in dynamischen Umgebungen
Echtzeitdaten werden mit unseren Navigationssystemen kontinuierlich erfasst, und zwar über die Position, Geschwindigkeit und Ausrichtung (Roll, Nick, Gier) des Fahrzeugs, wodurch eine präzise Steuerung auch in hochdynamischen Umgebungen wie unwegsamem Gelände oder im Gelände ermöglicht wird.
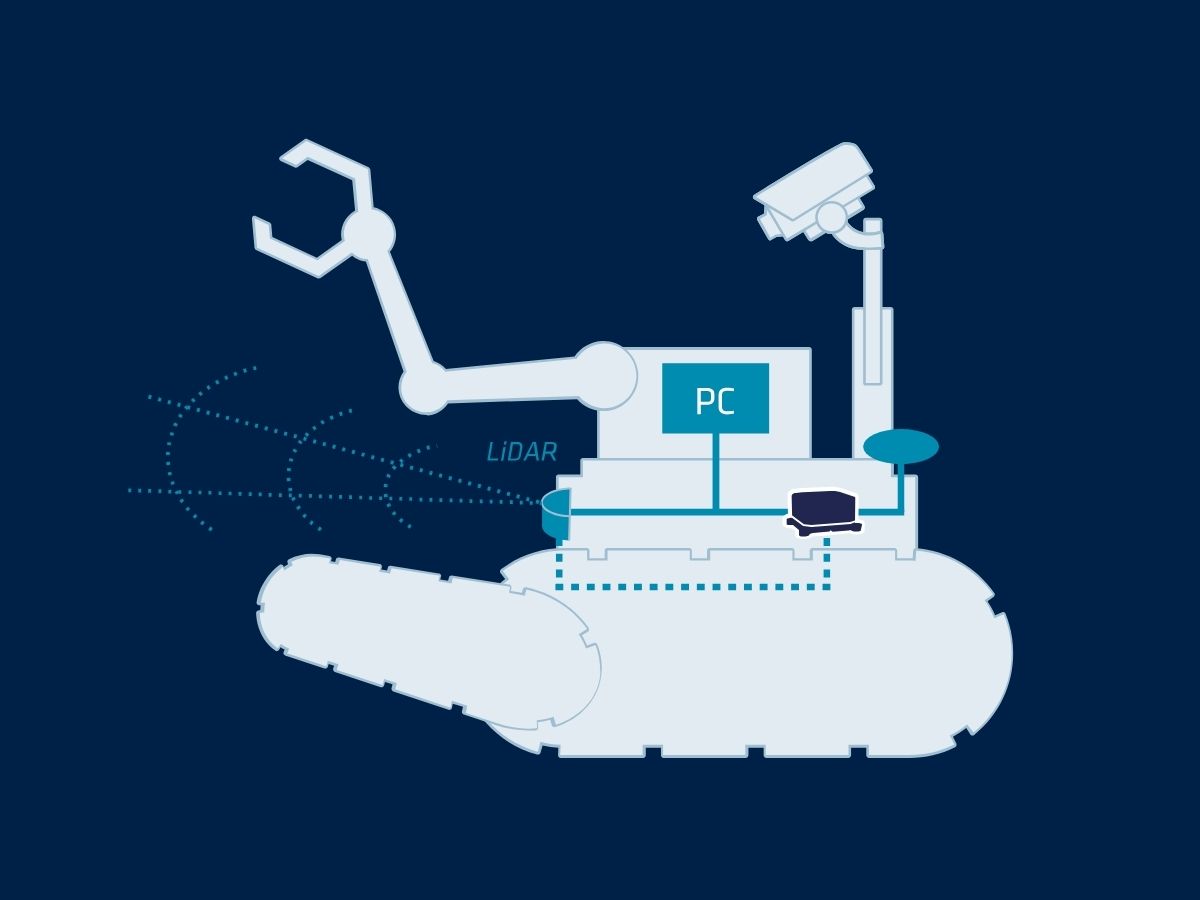
Die Präzision unserer Sensoren gewährleistet eine zuverlässige Leistung in komplexen und sich schnell verändernden Umgebungen. Um die Fahrzeugpositionsdaten zu erhöhen, können Sie unser INS mit anderen Bordsensoren wie Kameras, LiDAR und Odometrie integrieren, um ein Multi-Sensor-Navigationssystem zu bilden. Diese Sensorfusion verbessert die Gesamtgenauigkeit der Lokalisierung und das Situationsbewusstsein.
Darüber hinaus bieten sie hochzuverlässige Navigationsdaten, wodurch die Wahrscheinlichkeit von Kollisionen oder Missionsfehlern verringert wird. Dies ist besonders wichtig bei Militäroperationen oder in gefährlichen Umgebungen, in denen Sicherheit oberste Priorität hat.
Robustheit unter rauen Bedingungen
Ein autonomes Landfahrzeug operiert oft in extremen Umgebungen (wie Wüsten, Wäldern oder Katastrophengebieten), wo Umweltfaktoren wie Staub, Wetter oder elektromagnetische Interferenzen andere Navigationssysteme beeinträchtigen können.
Unsere Lösungen sind sehr widerstandsfähig gegen solche Bedingungen und gewährleisten eine robuste Leistung. Durch die Bereitstellung hochgenauer Orientierungs- und Positionsdaten verbessern unsere Sensoren die Fähigkeit eines UGV, komplexe Pfade autonom zu planen und zu verfolgen, wodurch menschliche Eingriffe minimiert werden.
Diese Fähigkeit verbessert die betriebliche Effizienz in den Bereichen Verteidigung, Logistik und industrielle Anwendungen.

Produktauswahl
Unsere Lösungen lassen sich nahtlos in UGV-Plattformen integrieren, um selbst unter schwierigsten Bedingungen eine zuverlässige Leistung zu erzielen.

Pulse-40

Ellipse-A

Ellipse-E

Ellipse-N

Ellipse-D

Ekinox Micro
Merkblatt zu Verteidigungsanwendungen
Erhalten Sie unsere Broschüre direkt in Ihrem Posteingang!
Fallstudien
Entdecken Sie die Erfolgsgeschichten hinter unseren UGV-Inertiallösungen. Erfahren Sie mehr über die bedeutenden Auswirkungen unserer fortschrittlichen Navigationssysteme auf den UGV-Betrieb in verschiedenen Branchen.
In jeder Fallstudie untersuchen wir konkrete Beispiele, die zeigen, wie unsere fortschrittlichen Inertialsensoren und die GNSS-Technologie in praktischen Situationen stets unübertroffene Genauigkeit, Zuverlässigkeit und Leistung erbracht haben. Erhalten Sie detaillierte Einblicke und praktische Beispiele, wie unsere Lösungen komplexe Herausforderungen bewältigen und operative Exzellenz fördern.
Tauchen Sie in unsere Fallstudien ein, um zu sehen, wie unsere Inertiallösungen Ihre Projekte verbessern und herausragende Ergebnisse erzielen können.





Sie reden über uns
Hören Sie aus erster Hand von den Innovatoren und Kunden, die unsere Technologie übernommen haben.
Ihre Erfahrungsberichte und Erfolgsgeschichten verdeutlichen den bedeutenden Einfluss unserer Sensoren in praktischen UGV-Navigationsanwendungen.
Entdecken Sie weitere Anwendungen für unbemannte Systeme
Entdecken Sie die vielfältigen Anwendungen von Inertialsystemen in unbemannten Plattformen zu Lande, zu Wasser und in der Luft. Von autonomen Landfahrzeugen und UAVs bis hin zu Unterwasserdrohnen und Überwasserschiffen gewährleisten unsere Technologien präzise Navigation, Stabilität und Kontrolle selbst in den anspruchsvollsten Umgebungen.
Haben Sie Fragen?
Was ist GNSS vs. GPS?
GNSS steht für Global Navigation Satellite System und GPS für Global Positioning System. Diese Begriffe werden oft synonym verwendet, aber sie beziehen sich auf unterschiedliche Konzepte innerhalb satellitengestützter Navigationssysteme.
GNSS ist ein Sammelbegriff für alle Satellitennavigationssysteme, während GPS sich speziell auf das US-amerikanische System bezieht. GNSS umfasst mehrere Systeme, die eine umfassendere globale Abdeckung bieten, wobei GPS nur eines dieser Systeme ist.
Durch die Integration von Daten aus mehreren Systemen erhalten Sie mit GNSS eine verbesserte Genauigkeit und Zuverlässigkeit, während GPS allein je nach Satellitenverfügbarkeit und Umgebungsbedingungen Einschränkungen aufweisen kann.
Was bedeuten Jamming und Spoofing?
Jamming und Spoofing sind zwei Arten von Störungen, die die Zuverlässigkeit und Genauigkeit von satellitengestützten Navigationssystemen wie GNSS erheblich beeinträchtigen können.
Jamming bezieht sich auf die absichtliche Störung von Satellitensignalen durch das Senden von Störsignalen auf denselben Frequenzen, die von GNSS-Systemen verwendet werden. Diese Interferenz kann die legitimen Satellitensignale überlagern oder übertönen, wodurch GNSS-Empfänger die Informationen nicht mehr genau verarbeiten können. Jamming wird häufig bei Militäroperationen eingesetzt, um die Navigationsfähigkeiten von Gegnern zu stören, und kann auch zivile Systeme beeinträchtigen, was zu Navigationsausfällen und betrieblichen Herausforderungen führt.
Spoofing hingegen beinhaltet die Übertragung gefälschter Signale, die echte GNSS-Signale imitieren. Diese täuschenden Signale können GNSS-Empfänger dazu verleiten, falsche Positionen oder Zeiten zu berechnen. Spoofing kann verwendet werden, um Navigationssysteme in die Irre zu führen oder falsch zu informieren, was möglicherweise dazu führt, dass Fahrzeuge oder Flugzeuge vom Kurs abkommen oder falsche Standortdaten liefern. Im Gegensatz zu Jamming, das lediglich den Signalempfang behindert, täuscht Spoofing den Empfänger aktiv, indem es falsche Informationen als legitim darstellt.
Sowohl Jamming als auch Spoofing stellen erhebliche Bedrohungen für die Integrität GNSS-abhängiger Systeme dar, was fortschrittliche Gegenmaßnahmen und robuste Navigationstechnologien erforderlich macht, um einen zuverlässigen Betrieb in umkämpften oder herausfordernden Umgebungen zu gewährleisten.
Was ist Trägheitsnavigation?
Trägheitsnavigation ist eine Methode zur Bestimmung der Position, Orientierung und Bewegung eines Fahrzeugs ausschließlich mittels interner Sensoren, ohne auf externe Signale wie GPS angewiesen zu sein. Im Kern misst ein Trägheitsnavigationssystem (INS) die Bewegung eines Objekts, indem es dessen Beschleunigung und Rotation in drei Dimensionen kontinuierlich verfolgt. Es verwendet eine Inertial Measurement Unit (IMU), die Beschleunigungssensoren zur Erfassung der linearen Beschleunigung und Gyroskope zur Messung der Winkelrate enthält. Durch die mathematische Integration dieser Messungen über die Zeit berechnet das System Geschwindigkeit, Lage (Attitude) und schließlich die Position relativ zu einem bekannten Startpunkt.
Da sie vollständig autark ist, funktioniert die Trägheitsnavigation in jeder Umgebung – unter der Erde, unter Wasser, im Weltraum oder unter GPS-verweigerten Bedingungen – was sie für Anwendungen wie Raketen, Flugzeuge, U-Boote, autonome Fahrzeuge und Robotik unverzichtbar macht. Moderne INS-Lösungen kombinieren oft Inertialsensoren mit zusätzlichen Hilfsquellen wie GNSS-Empfängern, Magnetometern, Barometern oder Doppler-Geschwindigkeitsloggen, um Drift zu reduzieren und die Langzeitgenauigkeit zu verbessern. Hochleistungs-INS verlassen sich auf präzise Sensorkalibrierung, fortschrittliche Filteralgorithmen und robuste Fehlermodellierung, um stabile, zuverlässige Navigationsdaten selbst in den anspruchsvollsten Umgebungen zu liefern.
