Високоточна навігація для автономних транспортних засобів
Інерційні навігаційні системи (INS) мають чимало переваг для застосування в автономних транспортних засобах. Завдяки використанню таких датчиків, як акселерометри та гіроскопи, INS забезпечують безперервне надходження точних навігаційних даних без необхідності опори на зовнішні сигнали.
Наші INS в режимі реального часу оновлену інформацію про положення, швидкість та орієнтацію транспортного засобу, забезпечуючи точну навігацію навіть у denied . Ми розробили сучасні алгоритми для мінімізації похибок у динаміці, що дозволяє підтримувати точність визначення положення транспортного засобу.

Надійність у складних умовах
Наша INS надійно INS в зонах GNSS, зокрема в тунелях, міських каньйонах та під густим листяним покривом. Вона захищає від заглушення та підробки сигналів, водночас доповнюючи GNSS підвищення безпеки навігації.
Система забезпечує миттєвий зворотний зв’язок щодо руху транспортного засобу, що дозволяє швидко приймати рішення та адаптивно реагувати. Не покладаючись на зовнішні сигнали, наша INS безперервно, що ідеально підходить для динамічних умов. Вона генерує точні дані для сучасних алгоритмів, таких як планування траєкторії, уникнення перешкод та оптимізація маршруту. Як наслідок, автономні системи працюють плавніше та ефективніше.
Крім того, вона забезпечує стабільну продуктивність незалежно від погоди, рельєфу місцевості чи перебоїв у сигналі. По суті, наша INS автономність, гарантує надійну навігацію та дозволяє транспортним засобам безпечно й ефективно працювати за будь-яких умов.

Дані в режимі реального часу та об'єднання даних з датчиків
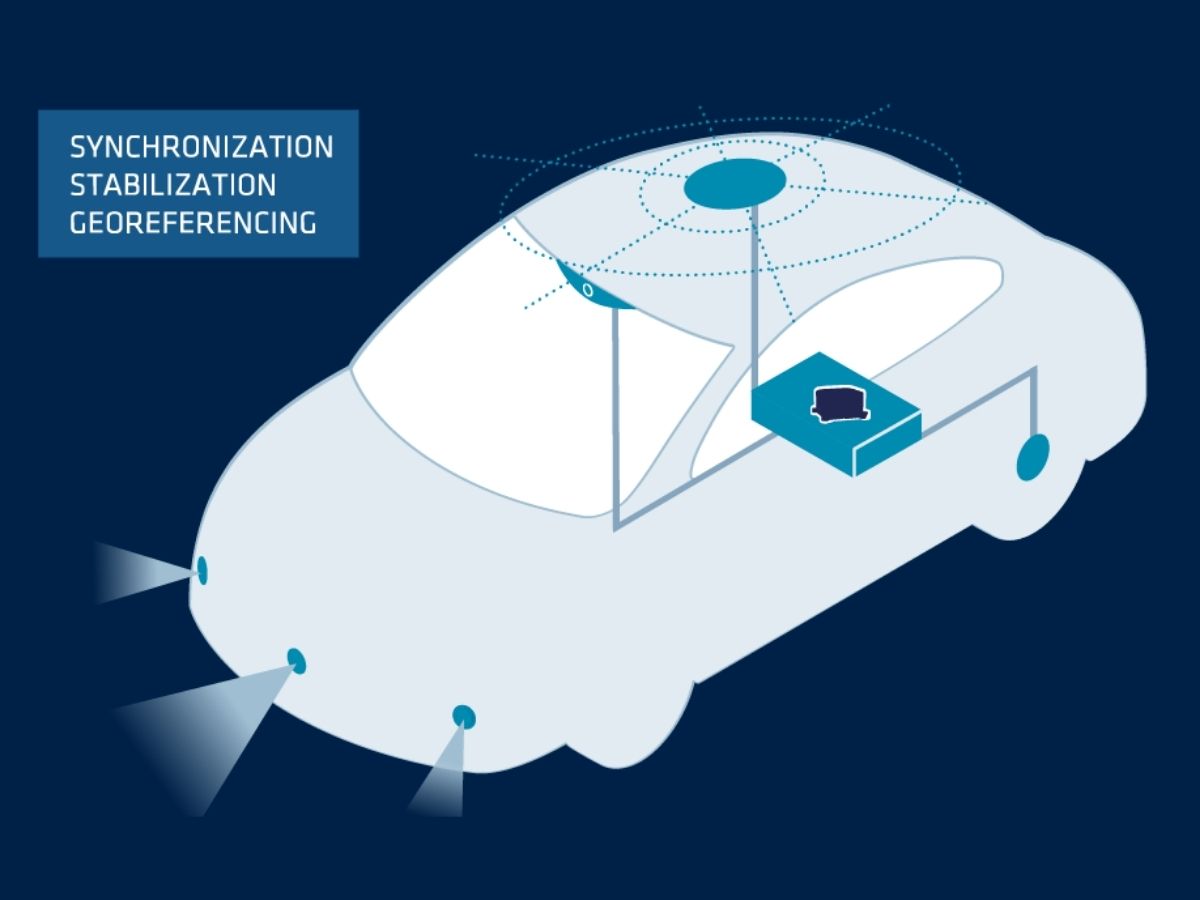
Наші датчики надають дані про рух та орієнтацію в режимі реального часу, завдяки чому автономні транспортні засоби можуть миттєво коригувати керування, прискорення та гальмування у відповідь на зміни рельєфу, дорожніх умов або дорожнього руху. Це також сприяє підтримці стабільності та контролю.
У поєднанні з іншими навігаційними засобами (наприклад, GNSS, LiDAR, камерами) вони підвищують загальну точність і надійність. Об'єднання даних цих датчиків покращує ситуаційну обізнаність та можливості прийняття рішень. Інтегруючи дані з декількох датчиків, наша INS виправити неточності, спричинені зовнішніми факторами, забезпечуючи більш надійну навігацію.
Ознайомтеся з нашими рішеннями для автономних транспортних засобів
Наші рішення безперебійно інтегруються з платформами безпілотних наземних транспортних засобів (UGV), забезпечуючи надійну роботу навіть у найскладніших умовах.

Ellipse-D

Ekinox Micro

Ekinox-D
Брошура про автономні додатки
Отримайте нашу брошуру прямо на свою електронну пошту!
Приклади застосування
Дізнайтеся, як інерційні рішення SBG Systemsреволюціонізують технологію автономних транспортних засобів, у нашому розділі прикладів з практики. Ці реальні історії успіху демонструють, як наші сучасні інерційні датчики забезпечують точну навігацію та надійність у складних умовах. Від підвищення безпеки транспортних засобів у міських умовах до оптимізації продуктивності вdenied — наші рішення дають змогу автономним транспортним засобам працювати з неперевершеною точністю та контролем.
Кожен приклад з практики містить цінну інформацію про інноваційні способи, якими наша технологія формує майбутнє автономного транспорту.
Система виявлення дефектів рейок від TREALIS із використанням Apogee Navsight
Визначення місцезнаходження трамваїв та поїздів
Як GapEOD сприяє підвищенню безпеки геофізичних досліджень за допомогою Ellipse
Визначення місцезнаходження трамваїв та поїздів
Дослідження автономних поромів на реальних міських водних шляхах
Автономне судноплавство на поромах
Як Ellipse допомогла човну на сонячній енергії взяти участь у змаганнях у Монако
Човен на сонячній енергії


Про нас говорять
Послухайте безпосередньо від новаторів та клієнтів, які вже використовують нашу технологію.
Їхні відгуки та історії успіху свідчать про значний вплив наших датчиків на практичне застосування в автономних транспортних засобах.
Дізнайтеся про інші сфери застосування автономних інерційних систем
Дізнайтеся, як автономні інерційні системи змінюють роботу підприємств у різних галузях. Від робототехніки та промислової автоматизації до гірничодобувної промисловості та логістики — наші високоефективні рішення забезпечують точну навігацію, орієнтацію та дані про рух навіть у умовах, GNSS. Відкрийте для себе нові можливості, що базуються на надійній автономності.
У вас є питання?
Тут ви знайдете відповіді на найпоширеніші запитання щодо представлених нами додатків. Якщо ви не знайшли потрібної інформації, будь ласка, звертайтеся до нас безпосередньо за допомогою.
Які існують рівні автономності безпілотних транспортних засобів?
Товариство автомобільних інженерів (SAE) класифікує рівні автономності безпілотних транспортних засобів за шістьма рівнями (від 0 до 5), визначаючи ступінь автоматизації керування транспортним засобом. Ось їхній перелік:
- Рівень 0: Відсутність автоматизації — водій повністю керує автомобілем у будь-який момент часу, використовуючи лише пасивні системи, такі як сигнали та попередження.
- Рівень 1: Системи допомоги водієві — автомобіль може допомагати в керуванні або при прискоренні/гальмуванні, але водій повинен зберігати контроль над автомобілем і стежити за дорожньою обстановкою (наприклад, адаптивний круїз-контроль).
- Рівень 2: Часткова автоматизація — транспортний засіб може одночасно керувати рульовим управлінням та прискоренням/гальмуванням, але водій повинен залишатися пильним і готовим у будь-який момент взяти керування на себе (наприклад, система «Автопілот» від Tesla, система «Super Cruise» від GM).
- Рівень 3: Умовна автоматизація — транспортний засіб може самостійно керувати всіма аспектами руху за певних умов, але водій повинен бути готовий втрутитися на вимогу системи (наприклад, під час руху по автомагістралі). Водієві не потрібно активно стежити за дорогою, але він повинен залишатися пильним.
- Рівень 4: Високий рівень автоматизації — транспортний засіб може самостійно виконувати всі завдання з керування в певних умовах або середовищах (наприклад, у міських районах або на автомагістралях) без втручання людини. Однак в інших середовищах або за особливих обставин керування може знадобитися людині.
- Рівень 5: Повна автоматизація — транспортний засіб є повністю автономним і може виконувати всі завдання з керування в будь-яких умовах без втручання людини. Водій не потрібен, а транспортний засіб може експлуатуватися будь-де та за будь-яких умов.
Ці рівні допомагають визначити етапи розвитку технологій автономних транспортних засобів — від базових систем допомоги водієві до повної автономності.
Що таке одометр?
Одометр — це прилад, що використовується для вимірювання відстані, яку проїхав транспортний засіб. Він надає важливу інформацію про пробіг транспортного засобу, що є корисним для різних цілей, таких як планування технічного обслуговування, розрахунок паливної економічності та оцінка вартості при перепродажі.
Одометри вимірюють відстань на основі кількості обертів коліс автомобіля. Коефіцієнт калібрування, що залежить від розміру шин, перетворює оберти коліс у відстань.
У багатьох навігаційних додатках, особливо в автомобілях, дані одометра можна інтегрувати з INS для підвищення загальної точності. Цей процес, відомий як об'єднання даних датчиків, поєднує переваги обох систем.
Що означають терміни «заглушення» та «спуфінг»?
Заглушення та підробка сигналів — це два види перешкод, які можуть істотно вплинути на надійність і точність супутникових навігаційних систем, таких як GNSS.
Під «заглушенням» розуміється навмисне порушення роботи супутникових сигналів шляхом передачі сигналів-перешкод на тих самих частотах, що використовуються GNSS . Ці перешкоди можуть перекривати або заглушати нормальні супутникові сигнали, внаслідок чого GNSS втрачають здатність точно обробляти інформацію. Заглушення зазвичай застосовується у військових операціях для порушення навігаційних можливостей супротивника, а також може впливати на цивільні системи, що призводить до збоїв у навігації та оперативних ускладнень.
Спуфінг, навпаки, полягає у передачі підроблених сигналів, що імітують справжні GNSS . Ці оманливі сигнали можуть змусити GNSS обчислювати неправильні координати або час. Спуфінг може використовуватися для введення в оману або дезінформації навігаційних систем, що потенційно може призвести до збиття транспортних засобів або літаків з курсу або надання неправдивих даних про місцезнаходження. На відміну від глушіння, яке лише перешкоджає прийому сигналу, спуфінг активно вводить приймач в оману, подаючи неправдиву інформацію як достовірну.
Як заглушення, так і підробка сигналів становлять серйозну загрозу для цілісності систем, GNSS, що вимагає застосування сучасних заходів протидії та відмовостійких навігаційних технологій для забезпечення надійної роботи в умовах військових дій або в складних умовах.
Що таке dead reckoning
Навігація за розрахунками — це метод навігації, який дозволяє визначати поточне місцезнаходження транспортного засобу шляхом постійного перенесення відомого минулого положення з урахуванням виміряних даних про рух, без використання зовнішніх сигналів, таких як GPS.
На практиці система бере за відправну точку базову позицію — зазвичай останнє відоме точне місцезнаходження — і використовує вбудовані датчики, такі як акселерометри, гіроскопи, одометри коліс або датчики швидкості, щоб оцінити, як транспортний засіб переміщався з плином часу. Інтегруючи ці вимірювання руху, dead reckoning зміни швидкості, орієнтації та переміщення, поступово формуючи оновлену оцінку положення. Хоча вона забезпечує повністю автономну навігацію навіть у середовищах,denied працює з перебоями, dead reckoning за своєю суттю dead reckoning до накопичення похибок: невеликі похибки датчиків, похибки коефіцієнта масштабування або вплив навколишнього середовища з часом зростають, що призводить до відхилення розрахункової траєкторії від реальної.
Щоб зменшити цей зсув, у сучасних інерційних навігаційних системах dead reckoning часто dead reckoning із зовнішніми допоміжними засобами, такими як GNSS, магнітометри, барометри або методи зіставлення з рельєфом місцевості. Незважаючи на свої обмеження, dead reckoning фундаментальним принципом навігації, оскільки забезпечує безперервне визначення координат у режимі реального часу навіть за відсутності абсолютних орієнтирів.
Що таке інерційна навігаційна система?
Інерційна навігаційна система (INS) — це автономне навігаційне рішення, яке визначає положення, швидкість та орієнтацію рухомої платформи шляхом безперервного вимірювання її руху за допомогою інерційних датчиків. В основі INS трійка акселерометрів, що вимірюють лінійні прискорення вздовж трьох перпендикулярних осей, та трійка гіроскопів, що вимірюють кутові швидкості навколо тих самих осей. Інтегруючи ці вимірювання в часі, система обчислює, як змінюються швидкість, орієнтація та місцезнаходження платформи від відомої початкової точки.
Оскільки система INS від зовнішніх сигналів, таких як GPS, радіомаяки чи візуальні орієнтири, вона може надійно працювати в умовах, коли зовнішні навігаційні засоби недоступні, denied або мають погіршену якість — наприклад, під водою, у приміщеннях, під землею або в умовах військового GNSS.
Сучасні INS містять складні алгоритми фільтрації, найчастіше фільтр Калмана, для об’єднання необроблених даних датчиків, зменшення дрейфу та визначення найбільш точного стану навігації. У багатьох випадках INS з GNSS, одометрами, доплерівськими датчиками швидкості або магнітометрами для обмеження довгострокового дрейфу та забезпечення високої стабільності навігації. Результатом є надійне навігаційне рішення з високою частотою оновлення, необхідне для літаків, БПЛА, ракет, автономних транспортних засобів, суден, автономних підводних апаратів та широкого спектру промислових систем, що вимагають точного та безперервного контролю руху й орієнтації.
