
У навігації термін «положение» означає орієнтацію транспортного засобу або об’єкта відносно фіксованої системи відліку, яка зазвичай визначається трьома осями обертання: pitch, roll та навколо вертикальної осі.
Ці осі описують кутове положення та рух транспортного засобу у тривимірному просторі. Тангаж означає нахил носа транспортного засобу вгору або вниз, roll нахил транспортного засобу з боку в бік уздовж його поздовжньої осі, а рискання — обертання навколо вертикальної осі вліво або вправо. Разом ці параметри визначають, як транспортний засіб розташовується та маневрує у своєму середовищі.
Положення має вирішальне значення для підтримання стабільності, забезпечення точного керування та точної навігації в різних сферах. Наприклад, в авіації положення допомагає пілотам або системам автопілота підтримувати горизонтальний політ, виконувати повороти та коригувати курс під час турбулентності.
Аналогічно, у морській навігації контроль положення забезпечує вертикальне положення судна та дотримання курсу, незважаючи на виклики, пов’язані з хвилями та течіями.
У космічних апаратах положення відіграє вирішальну роль у наведенні антен, сонячних панелей або наукових приладів у правильному напрямку, особливо коли зовнішні візуальні орієнтири недоступні.
Для вимірювання та контролю положення використовуються такі системи, як гіроскопи, акселерометри та магнітометри, які часто інтегровані в інерційну навігаційну систему (INS). Ці системи працюють у поєднанні з зовнішніми джерелами даних, такими як GNSS зіркові трекери, для підтримки точної орієнтації.
Розуміння та управління положенням є особливо важливим у динамічних середовищах, де зовнішні сили, такі як вітер, хвилі або гравітаційні аномалії, можуть впливати на траєкторію руху транспортного засобу.
Отже, ефективне керування орієнтацією забезпечує безпечне та ефективне пересування, дозволяючи транспортним засобам точно досягати своїх навігаційних цілей.
Визначення GNSS
Дані GNSS , надають кути roll, pitch та повороту, які характеризують положення об’єкта у просторі. Ці три складові є необхідними для розуміння орієнтації об’єкта відносно поверхні Землі або системи відліку.
- «Крен» — це обертання навколо передньої осі, що впливає на нахил об’єкта вліво та вправо.
- Кут нахилу — це обертання навколо осі зліва направо, що визначає нахил вгору та вниз.
- Відхилення — це обертання навколо вертикальної осі, яке визначає напрямок, у якому спрямований об’єкт.
Ці рішення поєднують дані з GNSS з даними додаткових датчиків, таких як акселерометри та гіроскопи, щоб забезпечити надзвичайно точну та надійну інформацію про орієнтацію.
Такий підхід є особливо цінним у середовищах, де точна орієнтація має вирішальне значення, наприклад у навігаційних системах для літаків, суден та автономних транспортних засобів. Завдяки інтеграції даних з цих різноманітних датчиків система забезпечує оптимальну роботу навіть у складних умовах.
Представлення ставлення
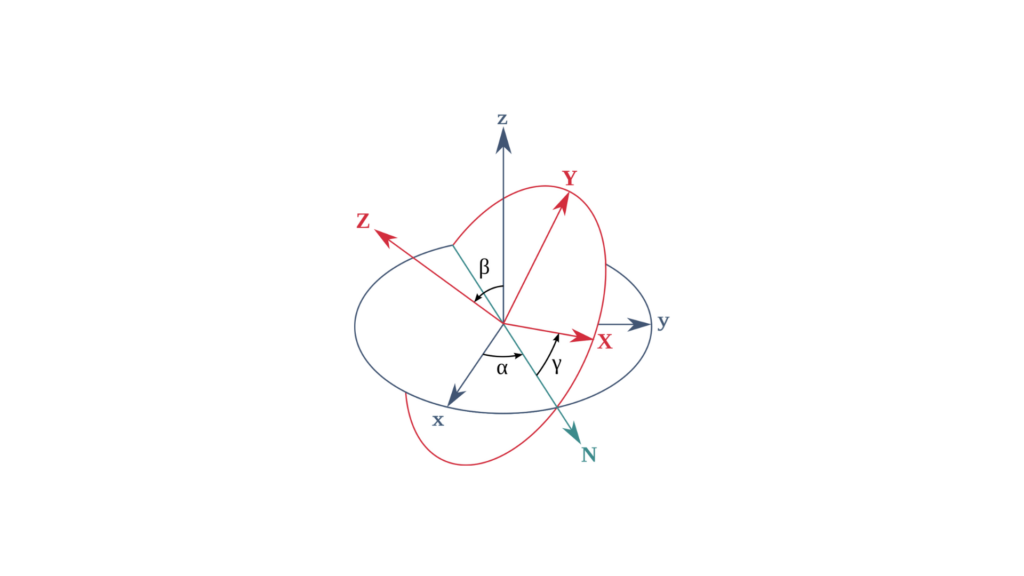
Орієнтація — це положення або поворот об’єкта відносно системи відліку, наприклад, поверхні Землі. У навігаційних системах це поняття має вирішальне значення для визначення положення об’єкта в просторі, що може стосуватися літаків, безпілотних літальних апаратів, суден або інших автономних систем. Існує кілька способів математичного та візуального представлення орієнтації.
1 – Кути Ейлера (нахил, крен, поворот)
Кути Ейлера характеризують орієнтацію об’єкта за допомогою трьох обертань: roll, pitch та навколо осі повороту. Ці кути описують обертання навколо трьох осей у певній послідовності, наприклад:
Крен (φ): обертання навколо осі «спереду-назад».
Нахил (θ): обертання навколо осі «зліва-направо».
Відхилення (ψ): обертання навколо вертикальної осі.
Математичне представлення
Кути Ейлера можна представити у вигляді матриці обертання розміром 3×3, де:
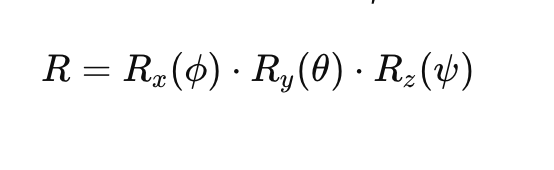
Тут:
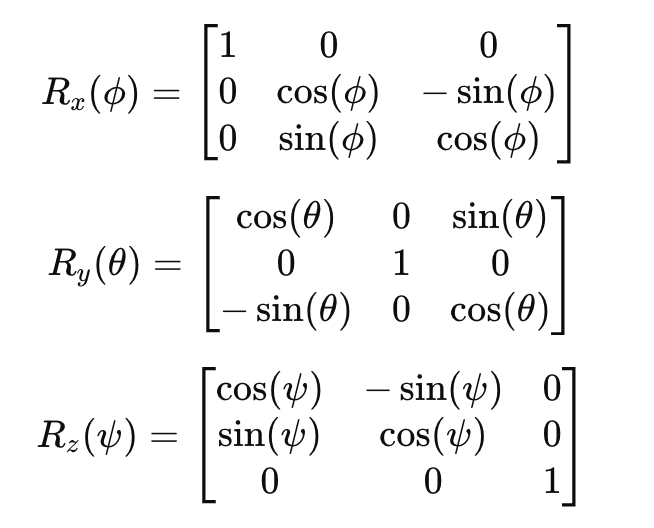
- Rx(ϕ)R_x(\phi)Rx(ϕ) — матриця обертання навколо осі roll.
- Ry(θ) — матриця обертання навколо pitch.
- Rz(ψ) — матриця обертання навколо осі рискання.
Кожна матриця обертання має вигляд:
2 – Матриці обертання
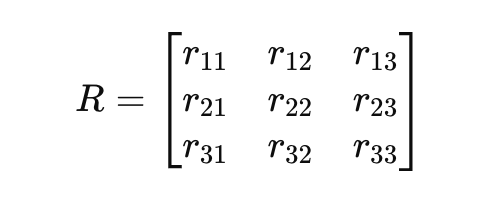
Матриці обертання пропонують альтернативний спосіб представлення орієнтації. У цьому методі матриця розміром 3×3 описує орієнтацію об’єкта у тривимірному просторі відносно фіксованої системи координат. Ці матриці є ортогональними, тобто їхні рядки та стовпці є одиничними векторами. Отже, обернена матриця є просто її транспонованою.
Математичне представлення
Загальну матрицю обертання 𝑅 можна записати у вигляді:
3 – Кватерніони
Кватерніони забезпечують більш компактне та чисельно стабільне представлення обертання. Вони дозволяють уникнути сингулярностей та проблем «заклинювання карданного шарніра», пов’язаних з кутами Ейлера. Кватерніон 𝑞 — це 4-вимірний вектор:
Де 𝑞0 — скалярна складова, а [𝑞1, 𝑞2, 𝑞3] — векторні складові. Кватерніонне представлення обертання можна записати у вигляді:

Тут:
- θ — кут повороту.
- [vx, vy, vz] — одиничний вектор, що представляє вісь обертання.
- i, j, k — одиниці базових кватерніонів.
Переваги кватерніонів:
- Дозволяє уникнути ефекту «гімбал-локу» та сингулярностей.
- Більш ефективний з точки зору обчислювальних витрат для інтерполяції.
4 – Матриці косинусів напрямків (DCM)
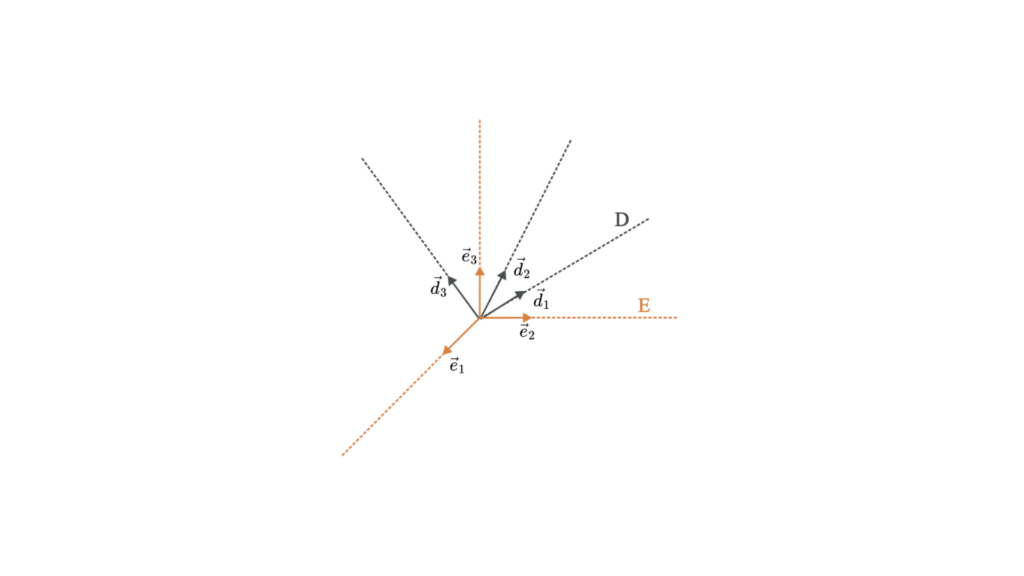
Матриця косинусів напрямків схожа на матрицю обертання і також описує орієнтацію об’єкта. Матриця DCM пов’язує координати вектора в одній системі відліку з координатами того самого вектора в іншій системі відліку.
Математичне представлення
Матриця косинусів напрямків 𝐶 — це матриця розміром 3×3, яка визначає взаємозв’язок між двома системами координат:
Де елементи cos (⋅) позначають косинус кута між векторами двох систем координат.
Розкажіть нам про свій проект