
W pierwszym artykule z serii “Opanowanie Dokładności” omówimy globalne systemy nawigacji satelitarnej (GNSS) i ich dokładność w trybie autonomicznym, biorąc pod uwagę GNSS i źródła błędów.
Czym jest system GNSS?
Systemy pozycjonowania satelitarnego, takie jak GPS, stały się wszechobecne, prowadząc nas w podróżach samochodowych i pieszych wędrówkach. Odgrywają również kluczową rolę w różnych zastosowaniach, tak różnorodnych jak pojazdy autonomiczne, rolnictwo i geodezja.
Ważne jest jednak, aby przejść od terminu „GPS” do bardziej wszechstronnego „GNSS” (Globalny System Nawigacji Satelitarnej), który obejmuje wszystkie konstelacje satelitarne, a nie tylko GPS.
Obecnie działają cztery globalne konstelacje satelitarne (GPS, GLONASS, GALILEO, BEIDOU). Dodatkowo istnieją uzupełniające konstelacje, które obsługują regiony lokalne, takie jak indyjski IRNSS, lub uzupełniają globalne, takie jak japoński QZSS.
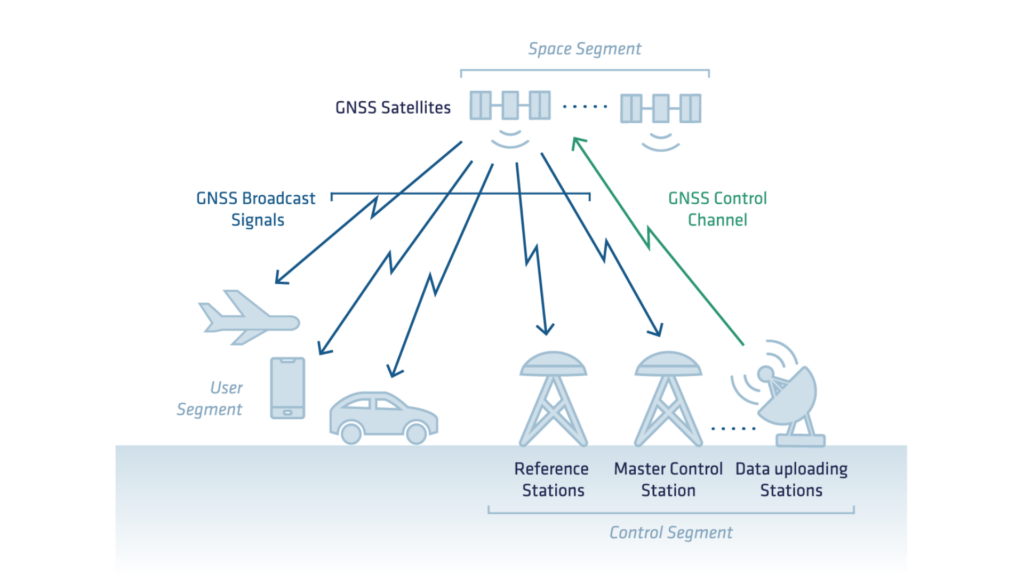
Oprócz satelitów, system GNSS składa się z innych zasadniczych segmentów:
- Segment satelitarny, który obejmuje konstelację satelitów.
- Segment kontrolny, składający się z naziemnych stacji kontrolnych i sprzętu. Odpowiadają one za monitorowanie konstelacji, określanie pozycji satelitów oraz zapewnienie ich ciągłego i prawidłowego działania.
- Segment użytkownika, który obejmuje sprzęt używany do obliczania pozycji na podstawie sygnałów odbieranych z satelitów.
Podstawowa zasada GNSS: Trilateracja
GNSS określa pozycję i czas odbiornika za pomocą trilateracji, wykorzystując sygnały z wielu satelitów.
Aby obliczyć pozycję, system musi rozwiązać cztery zmienne: szerokość geograficzną, długość geograficzną, wysokość i czas. Proces ten wymaga co najmniej czterech satelitów, chociaż dodatkowe satelity poprawiają dokładność i niezawodność.
Poniższy obraz ilustruje, jak działa trilateracja. Każdy satelita definiuje wokół siebie sferę, reprezentującą możliwe odległości do odbiornika.
Drugi satelita zawęża możliwe rozwiązania do przecięcia tych dwóch sfer. Trzeci satelita dodatkowo precyzuje rozwiązanie, pozwalając systemowi na dokładne określenie pojedynczej lokalizacji. W rzeczywistych zastosowaniach system musi również uwzględnić czas, co wymaga użycia czwartego satelity.
Sygnał emitowany przez satelity
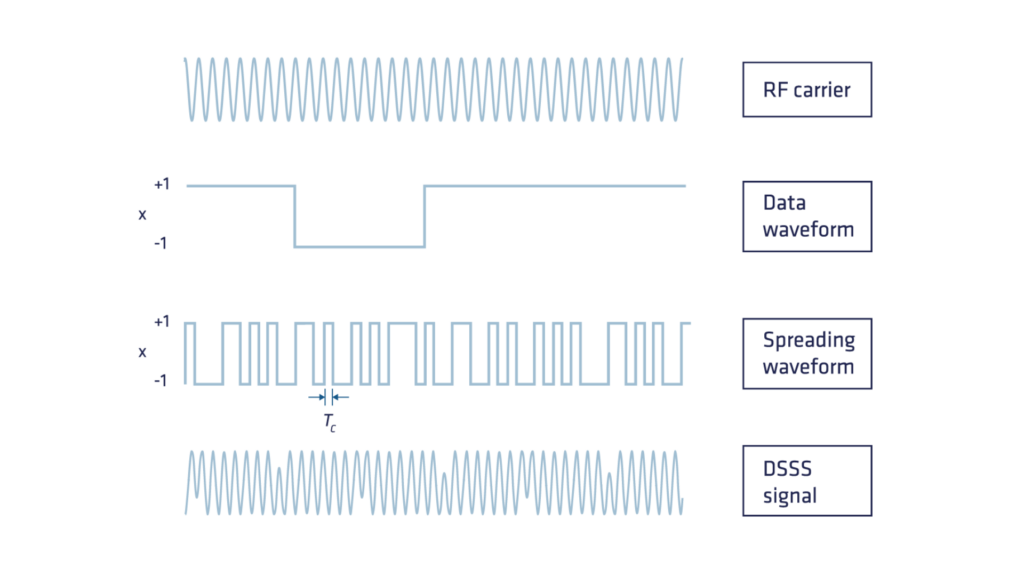
Satelity GNSS transmitują sygnały w różnych pasmach częstotliwości, takich jak L1, L2, L5 i inne. Istnieją trzy podstawowe składniki sygnałów GNSS:
- Dane nawigacyjne (niskiej częstotliwości): dane te, obliczane przez segment kontrolny, zawierają istotne informacje, takie jak dane efemeryd (orbitalne parametry Keplera niezbędne do obliczania pozycji satelitów), dane korekcji zegara i informacje uzupełniające. Przesyłane do satelity i transmitowane globalnie do odbiorników GNSS.
- Kod szumu pseudolosowego lub kod PRN: Każdy satelita transmituje unikalny kod szumu pseudolosowego (PRN), czyli wysokoczęstotliwościową, deterministyczną sekwencję zer i jedynek, zaprojektowaną z przewidywalnym wzorcem, tak aby odbiornik mógł ją odtworzyć. Kluczową zaletą dodania kodu PRN jest to, że umożliwia on wielu satelitom jednoczesne przesyłanie sygnałów na tej samej częstotliwości i bycie rozpoznawalnym przez odbiornik. Ta technika, znana jako Code Division Multiple Access (CDMA), przypisuje każdemu satelicie unikalny kod pseudolosowy. Tylko Glonass wykorzystuje FDMA (Frequency Division Multiple Access), gdzie każdy satelita ma nieco inną częstotliwość.
- Fala nośna RF: sygnał sinusoidalny zaprojektowana pierwotnie do przesyłania połączonego sygnału danych nawigacyjnych i kodu PRN. Zobaczymy później, jak ten komponent ewoluuje, stając się podstawą sygnału GNSS, umożliwiając dokładność pozycjonowania na poziomie centymetrów.
Pomiar odległości do satelity: kod i faza nośna
Pierwotnie system GPS został zaprojektowana tak, aby odbiornik wykorzystywał replikę kodu PRN i techniki autokorelacji do obliczania odległości satelita-odbiornik z dokładnością poniżej metra. Jednak fala nośna, pierwotnie przeznaczona do transmisji kodu PRN, okazała się cennym zasobem.
Pomiar fazy nośnej, choć dokładniejszy, wprowadził niejednoznaczność w określaniu odległości między satelitą a odbiornikiem. Dalsza analiza obu pomiarów została przedstawiona poniżej.
Obliczanie odległości satelita-odbiornik za pomocą kodu PRN
Odbiornik GNSS wykorzystuje proces zwany „Delay Lock Loop” do określenia opóźnienia czasowego między kodem nadawanym a kodem odbieranym. To opóźnienie czasowe, które odpowiada czasowi propagacji sygnału, jest następnie przekształcane w odległość poprzez pomnożenie go przez prędkość światła.
Jednakże, ze względu na niesynchronizowane zegary odbiornika i satelity, wynikowa odległość nazywana jest pseudorange. Oprócz błędu synchronizacji zegara, na pseudorange wpływa kilka innych błędów związanych ze środowiskiem propagacji (atmosfera, sprzęt itp.), które zostaną omówione w dalszej części artykułu.
Poprawa zakresu satelita-odbiornik: Pomiar fazy nośnej
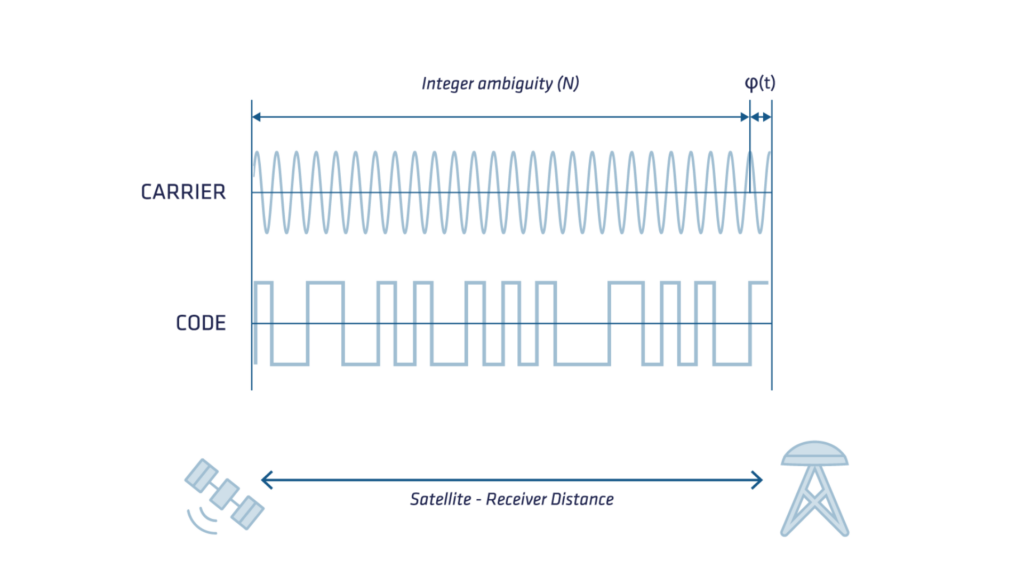
Odległość między satelitą a odbiornikiem można również określić poprzez zliczenie liczby cykli fazowych, które upłynęły między emisją a odbiorem sygnału, i pomnożenie tej liczby przez długość fali nośnej.
Ten pomiar jest o dwa rzędy wielkości dokładniejszy niż pomiar kodowy, ale stała, nieznana liczba całkowita cykli (zwana również ambiguitetem) wpływa na jego dokładność absolutną. Aby określić precyzyjną ewolucję fazy nośnej, odbiornik GNSS akumuluje przesunięcia częstotliwości Dopplera w fali nośnej, spowodowane względnym ruchem satelity względem odbiornika.
W przypadku zakłócenia sygnału, ten proces akumulacji nie może uwzględnić rzeczywistego ruchu, a nagłe skoki w pomiarze, znane również jako “przeskoki fazy” (cycle slips), mogą być zaobserwowane.
Prawidłowe zarządzanie przeskokami fazy (cycle slips) i ambiguitetem jest wyzwaniem i kluczowym aspektem precyzyjnych technik pozycjonowania, takich jak Real Time Kinematics (RTK) i Precise Point Positioning (PPP).
Poniższy diagram przedstawia falę nośną sygnału, kod i ich odpowiednie rozdzielczości.
Źródła błędów w GNSS
Początkowa dokładność GPS dla ogółu społeczeństwa (nie wojskowa) wynosiła około 100 m. Po wielu latach ewolucji (usunięcie selektywnej dostępności, wdrożenie nowych konstelacji i systemów SBAS, nowe satelity i nowe częstotliwości) dokładność autonomicznego GNSS wynosi obecnie od 5 m dla odbiorników GNSS podstawowego poziomu do 1 m dla odbiorników z wyższej półki.
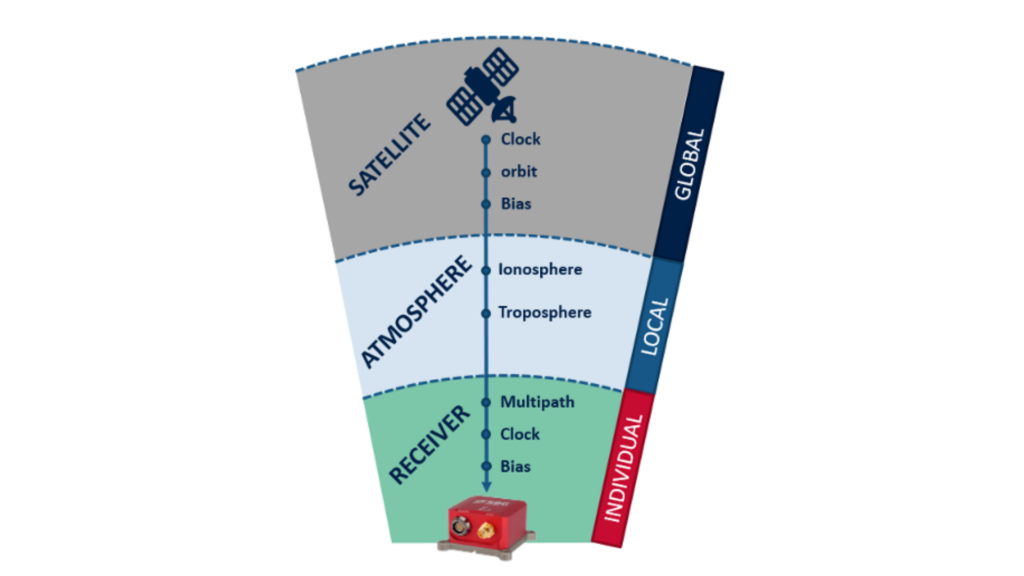
Błędy satelitarne
- Błędy zegara: Chociaż zegary atomowe na satelitach GNSS są bardzo precyzyjne, doświadczają niewielkiego dryfu. Niestety, nawet niewielkie odchylenie w zegarze satelity może prowadzić do znacznej rozbieżności w obliczonej pozycji przez odbiornik. Na przykład, zaledwie 10 nanosekund błędu zegara przekłada się na błąd pozycji o 3 metry w pomiarze odległości!
- Błędy orbity: Chociaż satelity GNSS poruszają się po bardzo precyzyjnych i dobrze udokumentowanych orbitach, orbity te podlegają niewielkim zmianom, podobnie jak zegary satelitarne. Podobnie jak niedokładności zegara, nawet niewielka zmiana na orbicie satelity może spowodować znaczny błąd w obliczonej pozycji. Utrzymują się resztkowe błędy na orbicie, przyczyniając się do potencjalnych błędów pozycji do ±2,5 metra.
Błędy atmosferyczne
- Opóźnienie jonosferyczne: Znajdująca się od 50 do 1000 km nad Ziemią jonosfera zawiera naładowane jony wpływające na transmisję sygnałów radiowych, powodując błędy pozycji (zwykle ±5 metrów, wyższe podczas wzmożonej aktywności jonosferycznej). Opóźnienie jonosferyczne zmienia się wraz z aktywnością słoneczną, porą dnia, porą roku i lokalizacją, co utrudnia przewidywania.
- Opóźnienie troposferyczne: Bezpośrednia warstwa atmosferyczna Ziemi, troposfera, wykazuje zmiany opóźnienia spowodowane wahaniami wilgotności, temperatury i ciśnienia atmosferycznego.
Błędy odbiornika
Wewnętrzny zegar odbiornika, który jest mniej dokładny w porównaniu z zegarem atomowym satelity, wraz z innymi błędami sprzętowymi i programowymi, dodaje szumy i obciążenia do pomiarów.
| Opóźnienie | Pochodzenie | Wielkość |
|---|---|---|
| Błąd pozycji | Satelita | 5m |
| Przesunięcie zegara | Satelita | 0-300 km |
| Opóźnienie instrumentalne | Satelita | 1-10 m |
| Efekt relatywistyczny | Satelita | 10 m |
| Opóźnienie jonosferyczne | Ścieżka (50-1000 km) | 2-50 m |
| Opóźnienie troposferyczne | Ścieżka (0-12 km) | 2-10 m |
| Opóźnienie instrumentalne | Odbiornik | 1-10 m |
| Przesunięcie zegara | Odbiornik | 0-300 km |
Aby zapewnić optymalną nawigację, system musi uwzględniać te błędy, łagodzić je za pomocą konkretnego modelu błędów lub szacować je za pośrednictwem filtru nawigacyjnego.
Obliczenia pozycji powinny również uwzględniać wiele innych czynników błędów niewymienionych w tym artykule, takich jak efekty pływowe i efekty relatywistyczne.
Różne źródła błędów wpływają na wydajność technologii GNSS, która zapewnia bardzo dokładne pozycjonowanie, nawigację i synchronizację.
Czynniki takie jak opóźnienia atmosferyczne, błędy zegara satelitarnego i efemeryd, zakłócenia wielodrogowe oraz szum odbiornika mogą obniżać dokładność. Chociaż nowoczesne techniki korekcji (różnicowy GNSS, RTK i PPP) pomagają łagodzić błędy GNSS i ich źródła, zrozumienie ich pochodzenia pozostaje kluczowe dla optymalizacji wydajności GNSS.
W miarę ewolucji postępów w przetwarzaniu sygnałów, fuzji danych z czujników i uczeniu maszynowym, systemy GNSS staną się jeszcze bardziej niezawodne, zapewniając większą niezawodność w różnorodnych zastosowaniach.
