
Rozszerzony filtr Kalmana (Extended Kalman Filter, EKF) jest potężnym narzędziem stosowanym w systemach nawigacji i sterowania do szacowania stanu systemu, który zmienia się w czasie. Jest to rozszerzenie filtra Kalmana, zaprojektowana do obsługi systemów nieliniowych, co czyni go kluczowym w zastosowaniach, w których zależność między zmiennymi nie jest liniowa.
Ten potężny algorytm służy do szacowania stanu systemu dynamicznego na podstawie zaszumionych pomiarów z czujników. Opiera się na standardowym filtrze Kalmana, uwzględniając systemy nieliniowe, które są powszechne w rzeczywistych scenariuszach nawigacyjnych. Podczas gdy tradycyjny filtr Kalmana zakłada dynamikę liniową i szum Gaussa, EKF pokonuje te ograniczenia poprzez linearyzację systemu nieliniowego wokół bieżącego oszacowania. Pozwala mu to skutecznie działać w bardziej złożonych, rzeczywistych środowiskach.
Podstawowa zasada działania rozszerzonego filtru Kalmana
U podstaw EKF leży ciągła aktualizacja wektora stanu – zestawu zmiennych opisujących aktualny stan systemu, takich jak pozycja, prędkość i orientacja w kontekstach nawigacyjnych. Opiera się on na modelu procesu, który przewiduje, jak stan zmienia się w czasie, uwzględniając dynamikę systemu i dane wejściowe sterowania. Tymczasem model pomiarowy łączy przychodzące dane z czujników ze stanem szacowanym, a macierz kowariancji reprezentuje niepewność zarówno w przewidywaniach, jak i obserwacjach, pomagając EKF zrównoważyć pewność między szacunkami modelu a danymi wejściowymi z czujników.
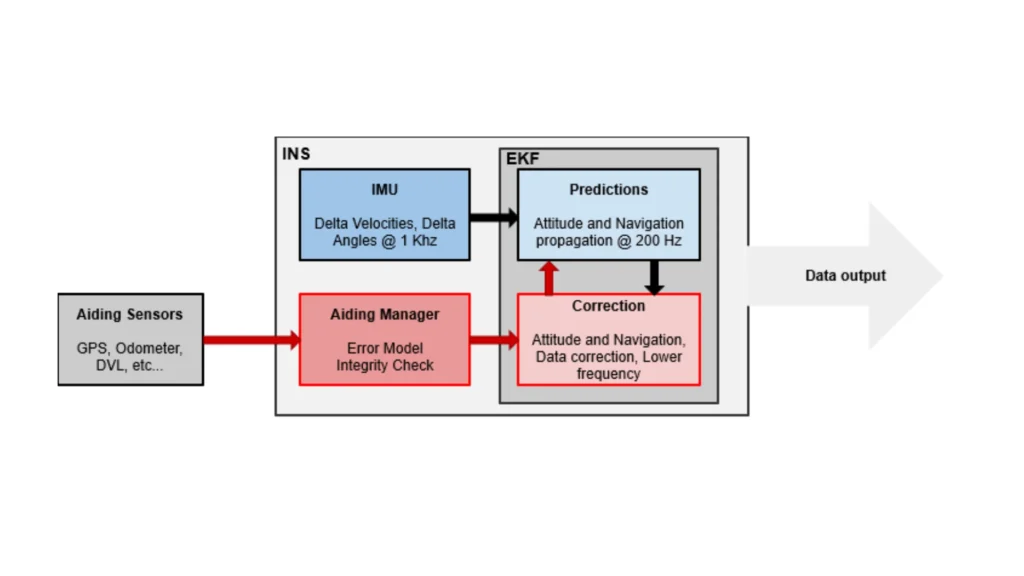
Filtr działa w dwóch głównych fazach: predykcji i aktualizacji. W fazie predykcji wykorzystuje model procesu do prognozowania następnego stanu i przewidywania związanej z nim niepewności poprzez aktualizację macierzy kowariancji. Aby zarządzać nieliniowością, EKF linearyzuje zarówno model procesu, jak i model pomiarowy, używając macierzy Jacobiego – reprezentacji matematycznych, które przybliżają zachowanie systemu w pobliżu bieżącego oszacowania.
W fazie aktualizacji EKF uwzględnia nowe pomiary z czujników, aby udoskonalić swoją predykcję. Oblicza wzmocnienie Kalmana, które określa, jaką wagę przypisać nowym pomiarom w stosunku do przewidywanego stanu. To wzmocnienie umożliwia EKF odpowiednie dostosowanie oszacowania stanu i aktualizację kowariancji w celu odzwierciedlenia zmniejszonej niepewności po pomiarze.
Zastosowanie EKF we współczesnych aplikacjach
EKF jest szeroko stosowany w nowoczesnych systemach nawigacyjnych ze względu na jego zdolność do dostarczania dokładnych estymacji stanu w obecności szumów i złożoności systemu. Na przykład, inercyjne systemy nawigacyjne (INS) opierają się na akcelerometrach i żyroskopach, które są podatne na dryft i szumy. EKF łączy dane z czujników, aby zapewnić stabilne estymacje pozycji, prędkości i orientacji dla platform dynamicznych. Te estymacje są kluczowe dla niezawodnego działania pojazdów autonomicznych, statków powietrznych i innych systemów mobilnych.
W robotyce i systemach autonomicznych EKF umożliwia niezawodną lokalizację i mapowanie. Roboty wykorzystują czujniki, takie jak LiDAR lub kamery, do szacowania pozycji i aktualizacji map za pomocą rozszerzonego filtru Kalmana (EKF). Umożliwia to mapowanie i lokalizację w czasie rzeczywistym, wspierając bezpieczną i autonomiczną pracę w nieznanych lub dynamicznych środowiskach.
W lotnictwie i obronności EKF odgrywa istotną rolę w systemach naprowadzania i śledzenia. Umożliwia samolotom, pociskom i statkom kosmicznym utrzymanie precyzyjnej pozycji i trajektorii, nawet w warunkach nieliniowego ruchu. EKF działa niezawodnie, nawet gdy jest narażony na zakłócenia zewnętrzne, które w innym przypadku mogłyby pogorszyć dokładność nawigacji.
Technologia stojąca za EKF obejmuje kilka krytycznych komponentów. Macierze Jacobiego wspierają proces linearyzacji, a fuzja czujników integruje dane z wielu źródeł, aby zapewnić odporność i dokładność. Aby wspierać działanie w czasie rzeczywistym, EKF zależy od wydajnych algorytmów obliczeniowych do operacji na macierzach, aktualizacji kowariancji i integracji pomiarów.
Podsumowując, rozszerzony filtr Kalmana (EKF) jest niezbędnym narzędziem w zaawansowanych systemach nawigacyjnych. Rozszerzając filtr Kalmana o obsługę systemów nieliniowych, można uzyskać dokładne szacowanie stanu w czasie rzeczywistym. Obsługuje szeroki zakres zastosowań, w tym robotykę, motoryzacyjne systemy ADAS, lotnictwo i systemy obronne. Opanowanie zasad i technologii EKF jest kluczem do opracowywania wysokowydajnych rozwiązań nawigacyjnych w złożonych i dynamicznych środowiskach.
