Nawigacja o wysokiej precyzji dla pojazdów autonomicznych
Systemy nawigacji inercyjnej (INS) oferują liczne korzyści w zastosowaniach związanych z pojazdami autonomicznymi. Dzięki wykorzystaniu czujników, takich jak akcelerometry i żyroskopy, INS zapewniają ciągłe i dokładne dane nawigacyjne bez konieczności polegania na sygnałach zewnętrznych.
Nasze INS w czasie rzeczywistym aktualne informacje o położeniu, prędkości i orientacji pojazdu, zapewniając dokładną nawigację nawet w środowiskachGNSS. Opracowaliśmy zaawansowane algorytmy mające na celu minimalizację błędów w miarę upływu czasu, co pozwala utrzymać dokładność pozycjonowania pojazdu.

Wytrzymałość w trudnych warunkach
Nasz INS niezawodnie w obszarach GNSS, w tym w tunelach, kanionach miejskich i gęstym pokryciu drzewnym. Chroni przed zakłócaniem i fałszowaniem sygnału, jednocześnie uzupełniając GNSS zwiększenia bezpieczeństwa nawigacji.
System zapewnia natychmiastową informację zwrotną o ruchu pojazdu, umożliwiając szybkie podejmowanie decyzji i adaptacyjne reakcje. Nie polegając na sygnałach zewnętrznych, nasz INS w trybie ciągłym, co sprawia, że idealnie nadaje się do dynamicznych środowisk. Generuje precyzyjne dane dla zaawansowanych algorytmów, takich jak planowanie trasy, omijanie przeszkód i optymalizacja trasy. Dzięki temu systemy autonomiczne działają płynniej i wydajniej.
Ponadto system zachowuje stałą wydajność niezależnie od pogody, ukształtowania terenu czy zakłóceń sygnału. Zasadniczo nasz INS autonomię, zapewnia niezawodną nawigację oraz umożliwia pojazdom bezpieczną i wydajną eksploatację w każdych warunkach.

Dane w czasie rzeczywistym i fuzja czujników
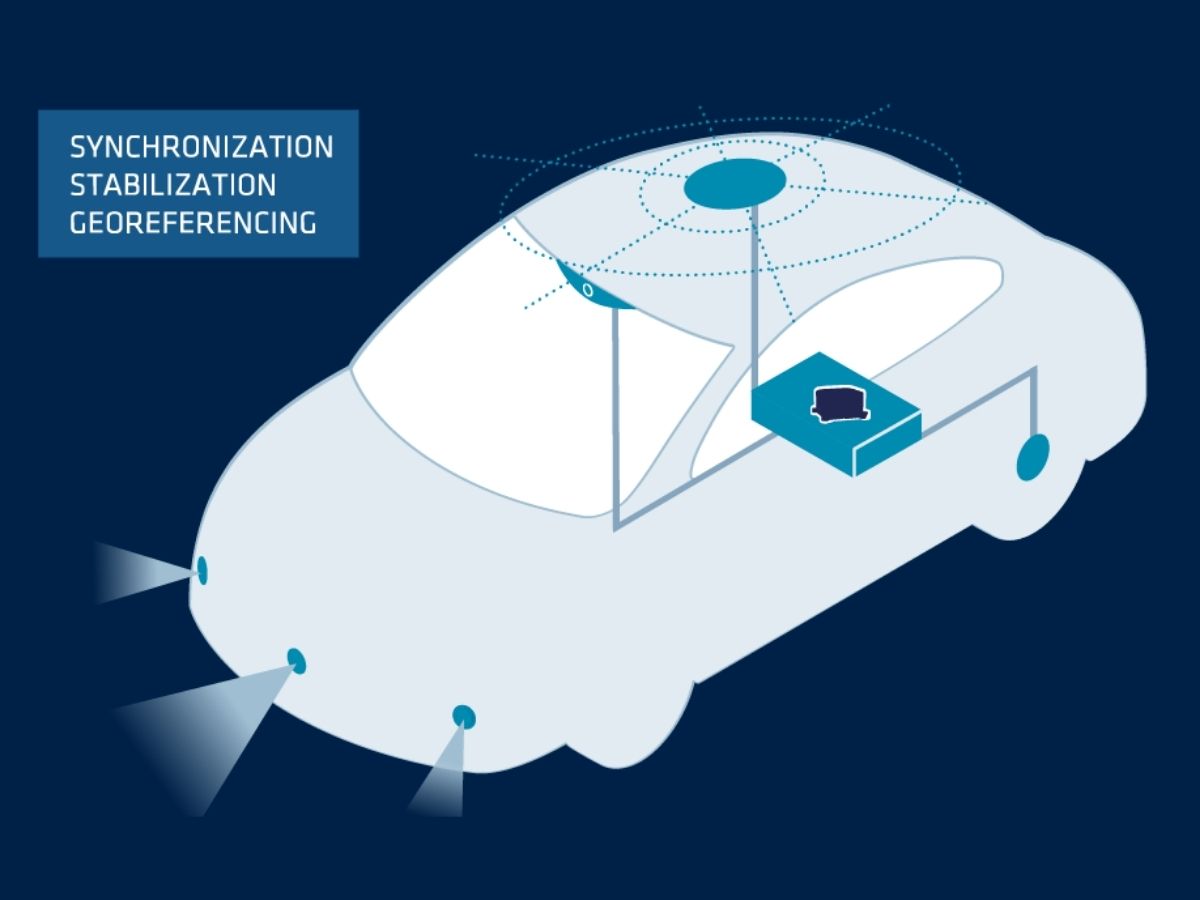
Nasze czujniki dostarczają dane o ruchu i orientacji w czasie rzeczywistym, dzięki czemu pojazdy autonomiczne mogą natychmiast dokonywać korekt w układzie kierowniczym, przyspieszeniu i hamowaniu w odpowiedzi na zmiany terenu, warunków drogowych lub ruchu. Pomaga również w utrzymaniu stabilności i kontroli.
W połączeniu z innymi pomocami nawigacyjnymi (np. GNSS, LiDAR, kamery) poprawiają ogólną dokładność i niezawodność. Ta fuzja czujników zwiększa świadomość sytuacyjną i możliwości podejmowania decyzji. Dzięki integracji danych z wielu czujników, nasz INS może pomóc w korygowaniu niedokładności spowodowanych czynnikami zewnętrznymi, zapewniając bardziej niezawodną nawigację.
Poznaj nasze rozwiązania dla pojazdów autonomicznych
Nasze rozwiązania integrują się bezproblemowo z platformami UGV, zapewniając niezawodne działanie nawet w najtrudniejszych warunkach.

Ellipse-D

Ekinox Micro

Ekinox-D
Broszura o zastosowaniach autonomicznych
Otrzymaj naszą broszurę prosto na swoją skrzynkę odbiorczą!
Studia przypadków
Odkryj, jak rozwiązania inercyjne SBG Systems rewolucjonizują technologię pojazdów autonomicznych w naszej sekcji studiów przypadku. Te historie sukcesu z życia wzięte pokazują, jak nasze zaawansowane czujniki inercyjne zapewniają precyzyjną nawigację i niezawodność w trudnych warunkach. Od poprawy bezpieczeństwa pojazdów w środowisku miejskim po optymalizację wydajności w scenariuszach bez dostępu do GNSS, nasze rozwiązania umożliwiają pojazdom autonomicznym działanie z niezrównaną dokładnością i kontrolą.
Każde studium przypadku dostarcza cennych informacji na temat innowacyjnych sposobów, w jakie nasza technologia napędza przyszłość transportu autonomicznego.
Wykrywanie uszkodzeń szyn przez firmę TREALIS przy użyciuNavsight Apogee Navsight
Pozycjonowanie tramwajów i pociągów
W jaki sposób GapEOD zapewnia większe bezpieczeństwo badań geofizycznych dzięki rozwiąz Ellipse
Pozycjonowanie tramwajów i pociągów
Badania nad autonomicznymi promami na rzeczywistych miejskich drogach wodnych
Autonomiczna żegluga promowa
W jaki sposób Ellipse pomogła łodzi napędzanej energią słoneczną wziąć udział w regatach w Monako
Łódź zasilana energią słoneczną


Oni o nas mówią
Posłuchaj z pierwszej ręki innowatorów i klientów, którzy wdrożyli naszą technologię.
Ich referencje i historie sukcesu ilustrują znaczący wpływ, jaki nasze czujniki mają w praktycznych zastosowaniach w pojazdach autonomicznych.
Poznaj inne zastosowania autonomicznych systemów inercyjnych
Odkryj, jak autonomiczne systemy inercyjne zmieniają operacje w różnych branżach. Od robotyki i automatyki przemysłowej po górnictwo i logistykę, nasze wysokowydajne rozwiązania zapewniają precyzyjną nawigację, orientację i dane o ruchu — nawet w środowiskach o utrudnionym dostępie do GNSS. Odkryj nowe możliwości dzięki niezawodnej autonomii.
Masz pytania?
Znajdź odpowiedzi na najczęściej zadawane pytania dotyczące prezentowanych przez nas aplikacji. Jeśli nie znajdziesz tego, czego szukasz, skontaktuj się z nami bezpośrednio, aby uzyskać pomoc.
Jakie są poziomy autonomii pojazdów autonomicznych?
Poziomy autonomii pojazdów autonomicznych są klasyfikowane w sześciu poziomach (od poziomu 0 do poziomu 5) przez Society of Automotive Engineers (SAE), które określają zakres automatyzacji w obsłudze pojazdu. Oto podział:
- Poziom 0: Brak automatyzacji – Kierowca w pełni kontroluje pojazd przez cały czas, przy użyciu jedynie pasywnych systemów, takich jak alerty i ostrzeżenia.
- Poziom 1: Wspomaganie kierowcy – Pojazd może wspomagać kierowanie lub przyspieszanie/zwalnianie, ale kierowca musi zachować kontrolę i monitorować otoczenie (np. adaptacyjny tempomat).
- Poziom 2: Częściowa automatyzacja – Pojazd może jednocześnie kontrolować zarówno kierowanie, jak i przyspieszanie/zwalnianie, ale kierowca musi pozostać zaangażowany i gotowy do przejęcia kontroli w każdej chwili (np. Autopilot Tesli, Super Cruise GM).
- Poziom 3: Warunkowa automatyzacja – Pojazd może obsługiwać wszystkie aspekty jazdy w określonych warunkach, ale kierowca musi być gotowy do interwencji na żądanie systemu (np. jazda po autostradzie). Kierowca nie musi aktywnie monitorować, ale musi pozostać czujny.
- Poziom 4: Wysoka automatyzacja – Pojazd może wykonywać wszystkie zadania związane z jazdą autonomicznie w określonych warunkach lub środowiskach (takich jak obszary miejskie lub autostrady) bez interwencji człowieka. Jednak w innych środowiskach lub w szczególnych okolicznościach człowiek może być zmuszony do prowadzenia pojazdu.
- Poziom 5: Pełna automatyzacja – Pojazd jest w pełni autonomiczny i może wykonywać wszystkie zadania związane z jazdą w każdych warunkach bez interwencji człowieka. Nie ma potrzeby obecności kierowcy, a pojazd może działać wszędzie i w każdych warunkach.
Poziomy te pomagają zdefiniować ewolucję technologii pojazdów autonomicznych, od podstawowego wspomagania kierowcy do pełnej autonomii.
Czym jest drogomierz?
Drogomierz to przyrząd służący do pomiaru odległości przebytej przez pojazd. Dostarcza on istotnych informacji o tym, jak daleko pojazd się poruszał, co jest przydatne do różnych celów, takich jak planowanie przeglądów, obliczanie zużycia paliwa i ocena wartości odsprzedaży.
Drogomierze mierzą odległość na podstawie liczby obrotów kół pojazdu. Współczynnik kalibracji, oparty na rozmiarze opon, przelicza obroty kół na odległość.
W wielu zastosowaniach nawigacyjnych, zwłaszcza w pojazdach, dane z licznika kilometrów mogą być zintegrowane z danymi INS w celu poprawy ogólnej dokładności. Proces ten, znany jako fuzja czujników, łączy zalety obu systemów.
Co oznaczają zakłócanie i spoofing?
Zakłócanie i spoofing to dwa rodzaje zakłóceń, które mogą znacząco wpłynąć na niezawodność i dokładność systemów nawigacji satelitarnej, takich jak GNSS.
Zakłócanie odnosi się do celowego zakłócania sygnałów satelitarnych poprzez nadawanie sygnałów zakłócających na tych samych częstotliwościach, które są używane przez systemy GNSS. Zakłócenia te mogą zagłuszać lub tłumić legalne sygnały satelitarne, uniemożliwiając odbiornikom GNSS dokładne przetwarzanie informacji. Zakłócanie jest powszechnie stosowane w operacjach wojskowych w celu zakłócenia zdolności nawigacyjnych przeciwników, a także może wpływać na systemy cywilne, prowadząc do awarii nawigacji i wyzwań operacyjnych.
Z drugiej strony, spoofing polega na transmisji fałszywych sygnałów, które naśladują oryginalne sygnały GNSS. Te zwodnicze sygnały mogą wprowadzać odbiorniki GNSS w błąd, powodując obliczanie nieprawidłowych pozycji lub czasów. Spoofing może być używany do wprowadzania w błąd systemów nawigacyjnych, potencjalnie powodując zbaczanie pojazdów lub samolotów z kursu lub dostarczanie fałszywych danych o lokalizacji. W przeciwieństwie do zakłócania, które jedynie utrudnia odbiór sygnału, spoofing aktywnie oszukuje odbiornik, prezentując fałszywe informacje jako legalne.
Zarówno zagłuszanie (jamming), jak i podszywanie się (spoofing) stanowią istotne zagrożenie dla integralności systemów bazujących na GNSS, co wymusza zastosowanie zaawansowanych środków zaradczych i odpornych technologii nawigacyjnych w celu zapewnienia niezawodnego działania w środowiskach zakłóconych lub wymagających.
Czym jest Nawigacja Zliczeniowa?
Nawigacja Zliczeniowa to metoda nawigacji, która określa aktualną pozycję pojazdu poprzez ciągłe propagowanie znanej przeszłej pozycji, wykorzystując zmierzone informacje o ruchu, bez polegania na sygnałach zewnętrznych, takich jak GPS.
W praktyce system zaczyna od punktu odniesienia — często ostatniej znanej dokładnej pozycji — i wykorzystuje pokładowe czujniki, takie jak akcelerometry, żyroskopy, odometrię kół lub logi prędkości, aby oszacować, jak pojazd poruszał się w czasie. Integrując te pomiary ruchu, Nawigacja Zliczeniowa oblicza zmiany prędkości, orientacji i przemieszczenia, stopniowo budując zaktualizowane oszacowanie pozycji. Chociaż zapewnia w pełni autonomiczną nawigację nawet w środowiskach, w których sygnał GPS jest niedostępny lub zakłócony, Nawigacja Zliczeniowa jest z natury podatna na akumulację błędów: małe odchylenia czujników, błędy współczynnika skali lub wpływy środowiskowe rosną z czasem, powodując dryfowanie szacowanej trajektorii od rzeczywistości.
Aby złagodzić ten dryft, Nawigacja Zliczeniowa jest często łączona z zewnętrznymi pomocami, takimi jak GNSS, magnetometry, barometry lub techniki dopasowywania terenu w nowoczesnych systemach nawigacji inercyjnej. Pomimo swoich ograniczeń, Nawigacja Zliczeniowa pozostaje fundamentalną zasadą w nawigacji, ponieważ zapewnia ciągłe pozycjonowanie w czasie rzeczywistym, nawet gdy absolutne punkty odniesienia są niedostępne.
Czym jest system nawigacji inercyjnej?
Inercyjny system nawigacji (INS) to autonomiczne rozwiązanie nawigacyjne, które określa pozycję, prędkość i orientację ruchomej platformy poprzez ciągłe mierzenie jej ruchu za pomocą czujników inercyjnych. U podstaw swojego działania, INS opiera się na triadzie akcelerometrów do wykrywania przyspieszeń liniowych wzdłuż trzech prostopadłych osi oraz triadzie żyroskopów do pomiaru prędkości kątowych wokół tych samych osi. Integrując te pomiary w czasie, system oblicza, jak prędkość, położenie i lokalizacja platformy ewoluują od znanego punktu początkowego.
Ponieważ INS nie zależy od zewnętrznych sygnałów, takich jak GPS, radiolatarnie lub odniesienia wizualne, może niezawodnie działać w środowiskach, w których zewnętrzne pomoce nawigacyjne są niedostępne, zakłócone lub ograniczone — takich jak pod wodą, wewnątrz budynków, pod ziemią lub w wojskowych scenariuszach zagłuszania GNSS.
Nowoczesne systemy INS zazwyczaj wykorzystują zaawansowane algorytmy filtrowania, najczęściej filtr Kalmana, do łączenia surowych danych z czujników, ograniczania dryfu i szacowania najdokładniejszego stanu nawigacyjnego. W wielu zastosowaniach INS jest sprzężony z GNSS, licznikami kilometrów, logami prędkości Dopplera lub magnetometrami w celu ograniczenia długoterminowego dryfu i zapewnienia bardzo stabilnej nawigacji. Rezultatem jest solidne rozwiązanie nawigacyjne o wysokiej częstotliwości aktualizacji, niezbędne dla statków powietrznych, UAV, pocisków, pojazdów autonomicznych, statków, AUV oraz szerokiej gamy systemów przemysłowych, które wymagają precyzyjnej, ciągłej świadomości ruchu i orientacji.
