
W nawigacji, orientacja odnosi się do położenia pojazdu lub obiektu względem ustalonego układu odniesienia, który zazwyczaj definiowany jest przez trzy osie obrotu: pitch, roll i yaw.
Osie te opisują położenie kątowe i ruch pojazdu w przestrzeni trójwymiarowej. Pitch odnosi się do nachylenia nosa pojazdu w górę lub w dół, przechylenie reprezentuje boczne nachylenie pojazdu wzdłuż jego osi podłużnej, a yaw oznacza obrót w lewo lub w prawo wokół jego osi pionowej. Wspólnie parametry te definiują sposób, w jaki pojazd jest ustawiony i jak nim manewrować w danym otoczeniu.
Orientacja ma kluczowe znaczenie dla utrzymania stabilności, zapewnienia precyzyjnego sterowania i umożliwienia dokładnej nawigacji w różnych dziedzinach. Na przykład w lotnictwie orientacja pomaga pilotom lub systemom autopilota utrzymać lot poziomy, wykonywać zakręty i korygować turbulencje.
Podobnie w nawigacji morskiej kontrola orientacji zapewnia, że statek pozostaje w pozycji pionowej i na kursie pomimo wyzwań stwarzanych przez fale i prądy.
W statkach kosmicznych orientacja odgrywa kluczową rolę w kierowaniu anten, paneli słonecznych lub instrumentów naukowych we właściwym kierunku, zwłaszcza gdy zewnętrzne wskazówki wizualne są niedostępne.
Do pomiaru i kontroli orientacji wykorzystywane są systemy takie jak żyroskopy, akcelerometry i magnetometry, często zintegrowane w Inercyjny System Nawigacyjny (INS). Systemy te współpracują z zewnętrznymi źródłami danych, takimi jak GNSS lub śledniki gwiazd, w celu utrzymania dokładnej orientacji.
Rozumienie orientacji i zarządzanie nią jest szczególnie ważne w dynamicznych środowiskach, gdzie siły zewnętrzne, takie jak wiatr, fale lub anomalie grawitacyjne, mogą wpływać na trajektorię pojazdu.
Skuteczna kontrola orientacji zapewnia zatem bezpieczne i wydajne przemieszczanie się, umożliwiając pojazdom precyzyjne realizowanie celów nawigacyjnych.
Rozwiązania orientacji GNSS
Rozwiązania GNSS określające orientację przestrzenną dostarczają kąty roll, pitch i yaw, które opisują orientację obiektu w przestrzeni. Te trzy komponenty są niezbędne do zrozumienia położenia obiektu względem powierzchni Ziemi lub układu odniesienia.
- Przechył (Roll) odnosi się do obrotu wokół osi skierowanej do przodu, wpływając na przechylenie obiektu w lewo i prawo.
- Pitch to obrót wokół osi poprzecznej, określający nachylenie w górę i w dół.
- Yaw to rotacja wokół osi pionowej, która określa kierunek, w którym obiekt jest zwrócony.
Rozwiązania te łączą dane z odbiorników GNSS z dodatkowymi czujnikami, takimi jak akcelerometry i żyroskopy, aby dostarczyć wysoce dokładne i niezawodne informacje o orientacji.
Takie podejście jest szczególnie cenne w środowiskach, w których precyzyjna orientacja jest kluczowa, jak w systemach nawigacyjnych dla samolotów, statków i pojazdów autonomicznych. Dzięki integracji tych różnorodnych danych z czujników, system zapewnia optymalną wydajność nawet w trudnych warunkach.
Reprezentacje Orientacji
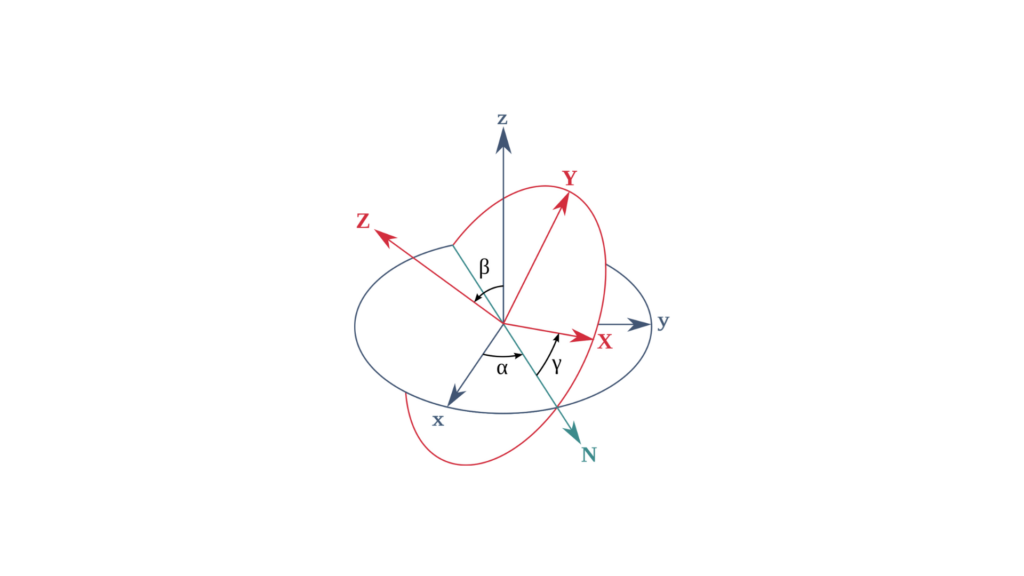
Położenie kątowe (Attitude) reprezentuje orientację lub obrót obiektu względem układu odniesienia, takiego jak powierzchnia Ziemi. W systemach nawigacyjnych koncepcja ta jest kluczowa dla określania orientacji obiektu w przestrzeni, co może dotyczyć statków powietrznych, UAV, statków morskich lub innych systemów autonomicznych. Istnieje kilka sposobów matematycznego i wizualnego przedstawiania położenia kątowego.
1 – Kąty Eulera (Roll, Pitch, Yaw)
Kąty Eulera reprezentują orientację obiektu poprzez trzy rotacje: roll, pitch i yaw. Kąty te opisują rotacje wokół trzech osi w określonej kolejności, na przykład:
Roll (φ): Rotacja wokół osi przód-tył.
Pitch (θ): Rotacja wokół osi bocznej.
Yaw (ψ): Rotacja wokół osi pionowej.
Reprezentacja Matematyczna
Kąty Eulera można przedstawić jako macierz obrotu 3×3, gdzie:
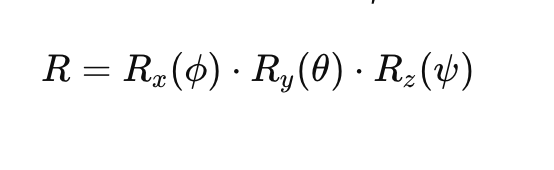
Gdzie:
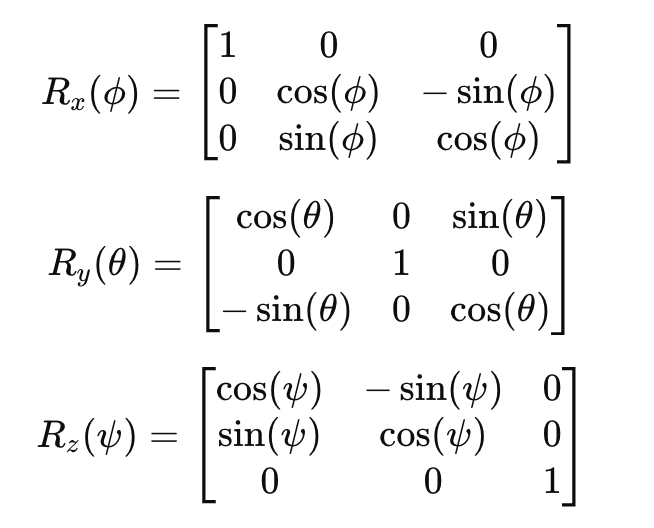
- Rx(ϕ)R_x(\phi)Rx(ϕ) jest macierzą obrotu dla przechyłu (roll).
- Ry(θ)R_y(\theta)Ry(θ) to macierz rotacji dla kąta pitch.
- Rz(ψ)R_z(\psi)Rz(ψ) jest macierzą obrotu dla odchylenia (yaw).
Każda macierz obrotu jest dana jako:
2 – Macierze Obrotu
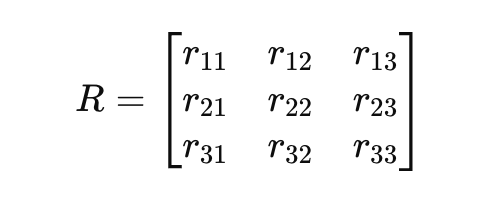
Macierze rotacji oferują alternatywny sposób reprezentacji orientacji. W tej metodzie macierz 3×3 opisuje orientację obiektu w przestrzeni 3D względem stałego układu współrzędnych. Macierze te są ortogonalne, co oznacza, że wiersze i kolumny są wektorami jednostkowymi. W konsekwencji odwrotność macierzy jest po prostu jej transpozycją.
Reprezentacja Matematyczna
Można zapisać ogólną macierz obrotu 𝑅 jako:
3 – Kwaterniony
Kwaterniony zapewniają bardziej zwartą i numerycznie stabilną reprezentację obrotu. Pozwalają uniknąć osobliwości i problemów z blokadą Gimbala związanych z kątami Eulera. Kwaternion 𝑞 jest wektorem 4-wymiarowym:
Gdzie 𝑞0 jest częścią skalarną, a [𝑞1, 𝑞2, 𝑞3] są składowymi wektorowymi. Reprezentację kwaternionową obrotu można zapisać jako:

Gdzie:
- θ to kąt obrotu.
- [vx,vy,vz] to wektor jednostkowy reprezentujący oś obrotu.
- i, j, k to podstawowe jednostki kwaternionowe.
Zalety kwaternionów:
- Pozwalają uniknąć blokady gimbala i osobliwości.
- Są bardziej wydajne obliczeniowo w interpolacji.
4 – Macierze Kosinusów Kierunkowych (DCM)
Macierz kosinusów kierunkowych jest podobna do macierzy obrotu i również opisuje orientację obiektu. DCM odnosi współrzędne wektora w jednym układzie do współrzędnych tego samego wektora w innym układzie.
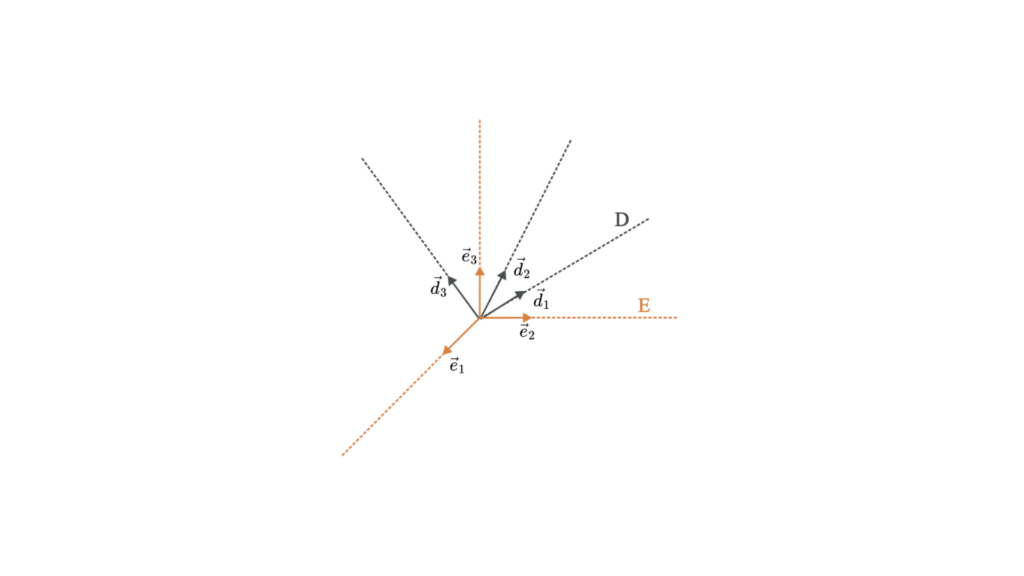
Reprezentacja Matematyczna
Macierz kosinusów kierunkowych 𝐶 to macierz 3×3, która definiuje relację między dwoma układami współrzędnych:
Gdzie elementy cos (⋅) reprezentują cosinus kąta między wektorami dwóch układów współrzędnych.
Opowiedz nam o swoim projekcie