


Ekinox-D Kompaktowe rozwiązanie INS GNSS z podwójną anteną
Ekinox-D to kompleksowy system nawigacji inercyjnej ze zintegrowanym odbiornikiem RTK GNSS, idealny do zastosowań, w których przestrzeń jest krytyczna. Ten zaawansowany INS/GNSS jest wyposażony w jedną lub dwie anteny i zapewnia orientację, kompensację kołysania (heave) i pozycję z dokładnością do centymetrów, nawet podczas przerw w dostępie do GNSS.
IMU jest podstawowym komponentem tego inercyjnego systemu nawigacyjnego. Wykorzystując technologię MEMS i innowacyjną, autorską integrację, IMU Ekinox-D zapewnia wyjątkową wydajność przy zachowaniu rozsądnych kosztów. Dodatkowo, do Ekinox-D można podłączyć DVL lub odometer jako wejścia wspomagające określanie prędkości.
Odkryj wszystkie funkcje i zastosowania Ekinox-D.
Funkcje Ekinox-D
Ekinox-D zawiera odbiornik GNSS klasy geodezyjnej (L1/L2/L5 GPS, GLONASS, GALILEO, BEIDOU), obsługujący pozycjonowanie SBAS, DGNSS i RTK. Z konfigurowalną częstotliwością odświeżania 5 Hz, odbiornik ten zapewnia najlepszą dokładność i niezawodność w trudnych warunkach GNSS dzięki zaawansowanym algorytmom automatycznej minimalizacji, które wykrywają i eliminują sytuacje związane z odbiciami wielodrożnymi lub zagłuszaniem Inmarsat / Iridium.
Oferuje pozycjonowanie RTK, jak również obsługę danych RAW w standardzie, co zapewnia centymetrową precyzję w czasie rzeczywistym lub w post-processingu. Podwójna antena umożliwia precyzyjne określenie heading w aplikacjach o niskiej dynamice.
Wewnętrzny podwójny demodulator pasma L obsługuje usługi Fugro Marinestar™ PPP, zapewniając globalną dokładność pozycjonowania lepszą niż 10 cm, bez konieczności stosowania specyficznej infrastruktury.
Sprawdź więcej informacji na temat specyfikacji naszego Ekinox-D.




Specyfikacje
Wydajność ruchu i nawigacji
1.2 m Pozycja pionowa Single point
1.2 m Pozycja pozioma RTK
0.01 m + 0.5 ppm Pozycja pionowa RTK
0,015 m + 1 ppm Pozycja pozioma PPK
0.01 m + 0.5 ppm * Wertykalna pozycja PPK
0,015 m + 1 ppm * Pojedynczy punkt roll/pitch
0.02 ° Roll/Pitch RTK
0.015 ° Roll/pitch PPK
0,01 ° * Pojedynczy punkt heading
0.05 ° Heading RTK
0.04 ° Heading PPK
0,03 ° *
Funkcje nawigacyjne
Pojedyncza i podwójna antena GNSS Dokładność kołysania w czasie rzeczywistym
5 cm lub 5 % wysokości fali Okres fali kołysania w czasie rzeczywistym
Od 0 do 20 s Tryb kołysania w czasie rzeczywistym
Automatyczna regulacja Dokładność opóźnionego kołysania
2 cm lub 2% Opóźniony okres fali kołysania
0 do 40 s
Profile ruchu
Statki nawodne, pojazdy podwodne, badania morskie, środowisko morskie i trudne warunki morskie Air
Samoloty, helikoptery, statki powietrzne, UAV Land
Samochody, motoryzacja, pociągi/koleje, ciężarówki, pojazdy dwukołowe, maszyny ciężkie, piesi, plecaki, teren
Wydajność GNSS
Wewnętrzna geodezyjna podwójna antena Zakres częstotliwości
Podwójna częstotliwość Funkcje GNSS
SBAS, SP, RTK, PPK Sygnały GPS
L1, L2, L5, L6 * Sygnały Galileo
E1, E5a, E5b Sygnały Glonass
L1 C/A, L2 C/A, L2P, L3 Sygnały Beidou
B1I, B1C, B2a, B2I,B3I Inne sygnały
Marinestar, CLAS, QZSS, Navic, L-Band * Czas ustalenia pozycji GNSS (time to first fix)
< 45 s Zakłócanie i spoofing
Zaawansowane mechanizmy minimalizacji zakłóceń i wskaźniki, OSNMA
Specyfikacje środowiskowe i zakres roboczy
IP-68 Temperatura pracy
-40 °C do 75 °C Wibracje
3 g RMS – 20 Hz do 2 kHz Wstrząsy
500 g przez 0,3 ms MTBF (obliczony)
50 000 godzin Zgodność z
MIL-STD-810, EN60945
Interfejsy
GNSS, RTCM, licznik przebiegu, DVL Protokoły output
NMEA, Binary sbgECom, TSS, Simrad, Dolog Protokoły Input
NMEA, Trimble, Novatel, Septentrio, Hemisphere, DVL (PD0, PD6, Teledyne, Nortel) Datalogger
8 GB lub 48 h @ 200 Hz Output rate
Do 200 Hz Ethernet
Full duplex (10/100 base-T), zegar główny PTP, NTP, interfejs web, FTP, REST API Porty szeregowe
RS-232/422 do 921 kbps: 3 wyjścia / 5 wejść CAN
1x CAN 2.0 A/B, do 1 Mbps Sync OUT
PPS, trigger do 200 Hz, wirtualny licznik przebiegu – 2 wyjścia Sync IN
PPS, odometer, znacznik zdarzeń do 1 kHz – 5 wejść
Specyfikacje mechaniczne i elektryczne
Od 9 do 36 VDC Pobór mocy
6 W Zasilanie anteny
5 VDC - maks. 150 mA na antenę | Zysk: 17 - 50 dB Waga (g)
600 g Wymiary (dł. x szer. x wys.)
100 mm x 86 mm x 75 mm
Specyfikacje czasowe
< 200 ns Dokładność PTP
< 1 µs Dokładność PPS
< 1 µs (jitter < 1 µs) Dryf w Nawigacji Zliczeniowej
1 ppm

Zastosowania Ekinox-D
Ekinox-D jest zaprojektowana do precyzyjnej nawigacji i monitoringu w czasie rzeczywistym w zastosowaniach lądowych, morskich, podwodnych i powietrznych, zapewniając dokładne dane nawet w najtrudniejszych warunkach.
W zastosowaniach lądowych zapewnia niezawodne pozycjonowanie i orientację dla mobilnego mapowania, pojazdów autonomicznych i operacji taktycznych. W projektach morskich i podwodnych wspiera niezawodną nawigację i kierowanie statkiem, co jest niezbędne dla bezpiecznych i wydajnych operacji. W zastosowaniach lotniczych nasz INS zwiększa stabilność i precyzję dla UAV i załogowych statków powietrznych. Dzięki monitorowaniu wydajności w czasie rzeczywistym, nasz INS zapewnia dokładne, użyteczne informacje w różnych środowiskach.
Poznaj wszystkie zastosowania w różnych sektorach.
Karta katalogowa Ekinox-D
Pobierz wszystkie cechy i specyfikacje czujnika prosto na swoją skrzynkę odbiorczą!
Porównaj Ekinox-D z innymi produktami
Porównaj naszą najbardziej zaawansowaną serię czujników inercyjnych do nawigacji, ruchu i pomiaru kołysania.
Pełne specyfikacje można znaleźć w instrukcji obsługi sprzętu dostępnej na żądanie.
-

Ekinox-D
- Pozycja pozioma RTK
- 0.01 m + 0.5 ppm
- Roll/Pitch RTK
- 0.015 °
- Heading RTK
- 0.04 °
- Odbiornik GNSS
- Wewnętrzna geodezyjna podwójna antena
- Waga (g)
- 600 g
- Wymiary (dł. x szer. x wys.)
- 100 × 86 × 75 mm
-
- Pozycja pozioma RTK
- 0.01 m + 1 ppm
- Roll/Pitch RTK
- 0.05 °
- Heading RTK
- 0.2 °
- Odbiornik GNSS
- Wewnętrzna podwójna antena
- Waga (g)
- 65 g
- Wymiary (dł. x szer. x wys.)
- 46 × 45 × 32 mm
-
- Pozycja pozioma RTK
- 0.01 m + 0.5 ppm
- Roll/Pitch RTK
- 0.015 °
- Heading RTK
- 0.05 °
- Odbiornik GNSS
- Wewnętrzna podwójna antena
- Waga (g)
- 165 g
- Wymiary (dł. x szer. x wys.)
- 42 × 57 × 60 mm
-
- Pozycja pozioma RTK
- 0,015 m + 1 ppm
- Roll/Pitch RTK
- 0.015 °
- Heading RTK
- 0.05 °
- Odbiornik GNSS
- Wewnętrzna podwójna antena
- Waga (g)
- 38 g
- Wymiary (dł. x szer. x wys.)
- 50 × 37 × 23 mm



Kompatybilność Ekinox-D
Dokumentacja i zasoby
Ekinox-D jest dostarczany z obszerną dokumentacją, zaprojektowana, aby wspierać użytkowników na każdym kroku.
Od przewodników instalacji po zaawansowaną konfigurację i rozwiązywanie problemów, nasze jasne i szczegółowe instrukcje zapewniają płynną integrację i działanie.
Nasze studia przypadków
Poznaj rzeczywiste przypadki użycia, pokazujące, jak nasz INS zwiększa wydajność, skraca czas przestoju i poprawia efektywność operacyjną. Dowiedz się, jak nasze zaawansowane sensory i intuicyjne interfejsy zapewniają precyzję i kontrolę potrzebną do osiągnięcia doskonałych wyników w Twoich aplikacjach.

Rozwiązanie ASV integrujące INS firmy SBG Systems i echosondę wielowiązkową
ASV – Autonomiczne pojazdy nawodne
OPSIA rozszerza swoje rozwiązanie dzięki integracji Ekinox INS
Echosonda wielowiązkowa i skaner laserowy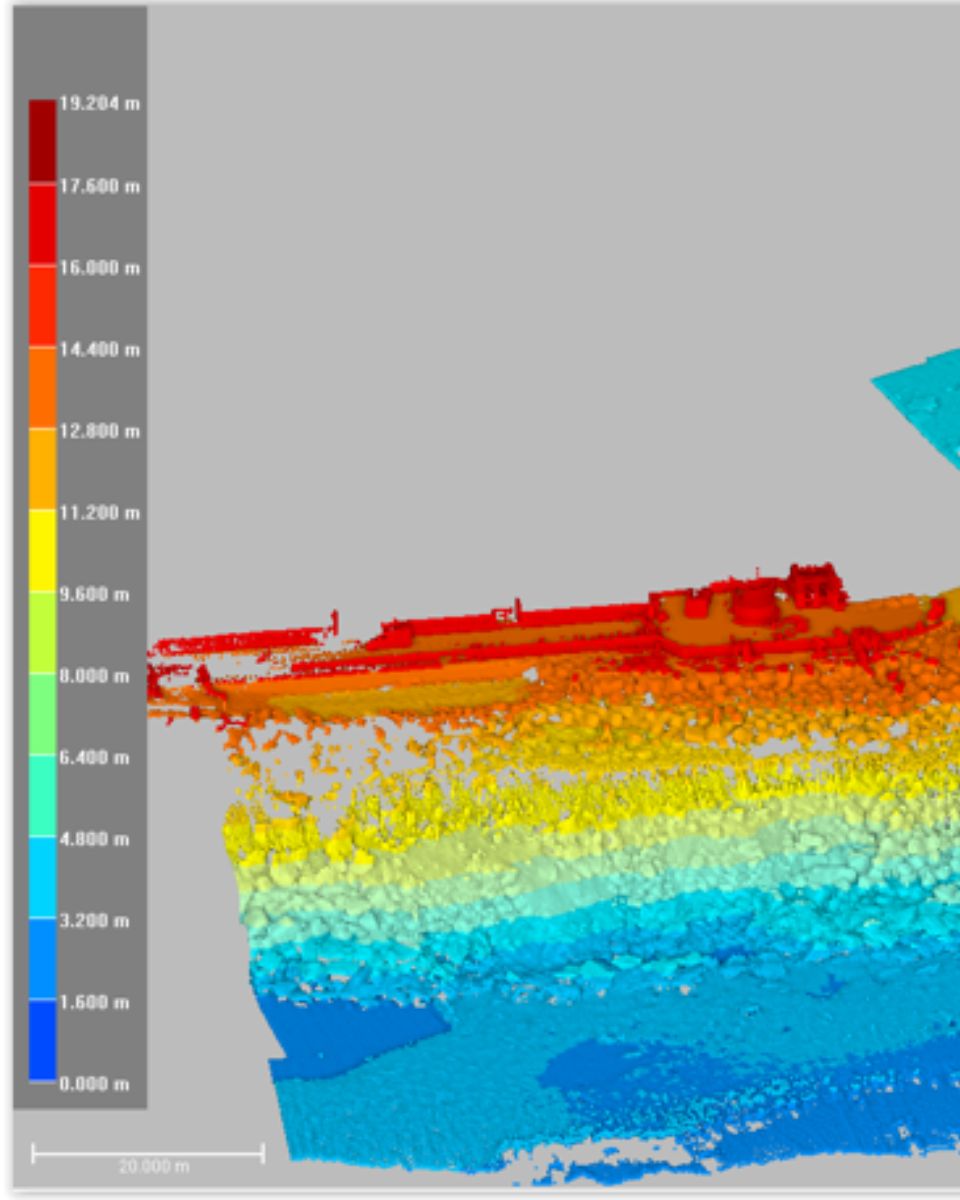
Wykrywanie uszkodzeń szyn przez firmę TREALIS przy użyciuNavsight Apogee Navsight
Pozycjonowanie tramwajów i pociągów


Dodatkowe produkty i akcesoria
Odkryj, jak nasze rozwiązania mogą zrewolucjonizować Twoją działalność, zapoznając się z naszą różnorodną ofertą zastosowań. Dzięki naszym czujnikom ruchu i nawigacji oraz oprogramowaniu uzyskujesz dostęp do najnowocześniejszych technologii, które napędzają sukces i innowacje w Twojej dziedzinie.
Dołącz do nas, aby odblokować potencjał nawigacji inercyjnej i rozwiązań pozycjonowania w różnych branżach.
Qinertia GNSS-INS

Kable

Anteny GNSS
Nasz proces produkcyjny
Odkryj precyzję i wiedzę specjalistyczną, które kryją się za każdym produktem SBG Systems. Poniższy film oferuje wgląd w to, jak skrupulatnie projektujemy, produkujemy i testujemy nasze wysokowydajne systemy nawigacji inercyjnej.
Od zaawansowanej inżynierii po rygorystyczną kontrolę jakości, nasz proces produkcyjny zapewnia, że każdy produkt spełnia najwyższe standardy niezawodności i dokładności.
Obejrzyj teraz, aby dowiedzieć się więcej!

Zapytaj o wycenę
Oni o nas mówią
Prezentujemy doświadczenia i referencje od profesjonalistów z branży i klientów, którzy wykorzystali nasze produkty w swoich projektach. Dowiedz się, jak nasza innowacyjna technologia zmieniła ich działalność, zwiększyła produktywność i zapewniła niezawodne wyniki w różnych zastosowaniach.
Sekcja FAQ
Witamy w naszej sekcji FAQ, w której odpowiadamy na najczęściej zadawane pytania dotyczące naszej najnowocześniejszej technologii i jej zastosowań. Znajdziesz tutaj wyczerpujące odpowiedzi dotyczące funkcji produktu, procesów instalacji, wskazówek dotyczących rozwiązywania problemów i najlepszych praktyk, aby zmaksymalizować swoje doświadczenia.
Znajdź odpowiedzi tutaj!
Co to jest kołysanie wzdłużne, poprzeczne i pionowe?
Surge, sway i heave to trzy ruchy translacyjne, które opisują sposób poruszania się statku lub platformy w oceanie. Stanowią one część sześciu stopni swobody (DOF) ruchu, które obejmują również pitch, roll i yaw (ruchy obrotowe).
- Kołysanie wzdłużne to liniowy ruch jednostki wzdłuż osi podłużnej (do przodu i do tyłu). Na przykład, gdy statek przyspiesza lub zwalnia z powodu fal lub sił napędowych, doświadcza kołysania wzdłużnego.
- Kołysanie poprzeczne to liniowy ruch wzdłuż osi poprzecznej (z boku na bok). Występuje, gdy jednostka dryfuje na boki z powodu prądów, wiatru lub fal nadchodzących z boku.
- Kołysanie pionowe to liniowy ruch wzdłuż osi pionowej (w górę i w dół). Jest ono spowodowane głównie przez fale podnoszące i opuszczające jednostkę.
Kołysanie wzdłużne, poprzeczne i pionowe razem definiują przemieszczenia translacyjne jednostki w przestrzeni trójwymiarowej. Te ruchy są krytyczne w nawigacji, wierceniach podmorskich, dynamicznym pozycjonowaniu i pomiarach morskich, ponieważ bezpośrednio wpływają na stabilność, dokładność i bezpieczeństwo.
Co to jest batymetria?
Batymetria to badanie i pomiar głębokości i kształtu podwodnego terenu, skupiające się przede wszystkim na mapowaniu dna morskiego i innych zanurzonych krajobrazów. Jest to podwodny odpowiednik topografii, dostarczający szczegółowych informacji na temat podwodnych cech oceanów, mórz, jezior i rzek. Batymetria odgrywa kluczową rolę w różnych zastosowaniach, w tym w nawigacji, budownictwie morskim, eksploracji zasobów i badaniach środowiskowych.
Nowoczesne techniki batymetryczne opierają się na systemach sonarowych, takich jak echosondy jedno- i wielowiązkowe, które wykorzystują fale dźwiękowe do pomiaru głębokości wody. Urządzenia te wysyłają Pulse dźwiękowe w kierunku dna morskiego i rejestrują czas powrotu echa, obliczając głębokość na podstawie prędkości dźwięku w wodzie. W szczególności echosondy wielowiązkowe umożliwiają mapowanie szerokich pasów dna morskiego jednocześnie, zapewniając bardzo szczegółowe i dokładne odwzorowania dna morskiego. Często rozwiązanie RTK + INS jest powiązane w celu tworzenia precyzyjnie pozycjonowanych, trójwymiarowych reprezentacji batymetrycznych dna morskiego.
Dane batymetryczne są niezbędne do tworzenia map morskich, które pomagają bezpiecznie nawigować statkom, identyfikując potencjalne zagrożenia podwodne, takie jak zatopione skały, wraki i łachy piaskowe. Odgrywają również istotną rolę w badaniach naukowych, pomagając naukowcom zrozumieć podwodne cechy geologiczne, prądy oceaniczne i ekosystemy morskie.
Co to jest hydrografia?
Hydrografia to proces pomiaru i mapowania fizycznych cech zbiorników wodnych, w tym oceanów, rzek, jezior i obszarów przybrzeżnych. Obejmuje zbieranie danych związanych z głębokością, kształtem i konturami dna morskiego (mapowanie dna morskiego), a także lokalizacją zatopionych obiektów, zagrożeń nawigacyjnych i innych podwodnych elementów (np. rowów wodnych). Hydrografia ma kluczowe znaczenie dla różnych zastosowań, w tym bezpieczeństwa nawigacji, zarządzania wybrzeżem i pomiarów wybrzeża, budownictwa i monitoringu środowiska.
Hydrografia obejmuje kilka kluczowych elementów, począwszy od batymetrii, która mierzy głębokość wody i topografię dna morskiego za pomocą systemów sonarowych, takich jak echosondy jedno- lub wielowiązkowe, które wysyłają Pulse dźwiękowe do dna morskiego i mierzą czas powrotu echa.
Dokładne pozycjonowanie ma kluczowe znaczenie i jest osiągane za pomocą globalnych systemów nawigacji satelitarnej (GNSS) oraz inercyjnych systemów nawigacyjnych (INS), które łączą pomiary głębokości z precyzyjnymi współrzędnymi geograficznymi. Dodatkowo, mierzone są dane dotyczące kolumny wody, takie jak temperatura, zasolenie i prądy, a także zbierane są dane geofizyczne w celu wykrywania obiektów podwodnych, przeszkód lub zagrożeń za pomocą narzędzi takich jak sonar boczny i magnetometry.
Co to jest echosonda wielowiązkowa?
Echosonda wielowiązkowa (MBES) to zaawansowana technika hydrograficzna używana do mapowania dna morskiego i podwodnych elementów z dużą precyzją.
W przeciwieństwie do tradycyjnych echosond jednowiązkowych, które mierzą głębokość w jednym punkcie bezpośrednio pod jednostką, MBES wykorzystuje układ wiązek sonarowych do jednoczesnego rejestrowania pomiarów głębokości na szerokim pasie dna morskiego. Umożliwia to szczegółowe mapowanie terenu podwodnego w wysokiej rozdzielczości, w tym topografii, cech geologicznych i potencjalnych zagrożeń.
Systemy MBES emitują fale dźwiękowe, które przemieszczają się przez wodę, odbijają się od dna morskiego i wracają do jednostki. Analizując czas potrzebny na powrót echa, system oblicza głębokość w wielu punktach, tworząc kompleksową mapę podwodnego krajobrazu.
Technologia ta jest niezbędna do różnych zastosowań, w tym nawigacji, budownictwa morskiego, monitoringu środowiska i eksploracji zasobów, dostarczając krytycznych danych dla bezpiecznych operacji morskich i zrównoważonego zarządzania zasobami morskimi.
Czym są czujniki pomiaru fal?
Czujniki pomiaru fal są niezbędnymi narzędziami do zrozumienia dynamiki oceanów oraz poprawy bezpieczeństwa i wydajności operacji morskich. Dostarczając dokładne i aktualne dane o stanie falowania, pomagają w podejmowaniu decyzji w różnych sektorach, od żeglugi i nawigacji po ochronę środowiska. Boje falowe to urządzenia pływające wyposażone w czujniki do pomiaru parametrów fal, takich jak wysokość, okres i kierunek.
Zazwyczaj wykorzystują akcelerometry lub żyroskopy do wykrywania ruchu fal (np. okres fali) i mogą przesyłać dane w czasie rzeczywistym do obiektów na brzegu w celu analizy.
