
In der Navigation bezieht sich die Lage auf die Ausrichtung eines Fahrzeugs oder Objekts relativ zu einem festen Bezugssystem, das typischerweise durch drei Drehachsen definiert wird: Nick-, Roll- und Gierachse.
Diese Achsen beschreiben die Winkelposition und Bewegung des Fahrzeugs im dreidimensionalen Raum. Das Nicken bezieht sich auf die Auf- oder Abwärtsneigung der Fahrzeugnase, das Rollen stellt die seitliche Neigung des Fahrzeugs entlang seiner Längsachse dar und das Gieren bezeichnet die Links- oder Rechtsdrehung um seine vertikale Achse. Zusammengenommen definieren diese Parameter, wie ein Fahrzeug in seiner Umgebung positioniert und manövriert wird.
Die Lage ist entscheidend für die Aufrechterhaltung der Stabilität, die Gewährleistung einer präzisen Steuerung und die Ermöglichung einer genauen Navigation in verschiedenen Bereichen. In der Luftfahrt beispielsweise hilft die Lage Piloten oder Autopilotsystemen, einen horizontalen Flug aufrechtzuerhalten, Kurven auszuführen und sich an Turbulenzen anzupassen.
In ähnlicher Weise stellt die Lageregelung in der maritimen Navigation sicher, dass ein Schiff trotz der Herausforderungen durch Wellen und Strömungen aufrecht und auf Kurs bleibt.
In Raumfahrzeugen spielt die Lage eine entscheidende Rolle bei der Ausrichtung von Antennen, Sonnenkollektoren oder wissenschaftlichen Instrumenten in die richtige Richtung, insbesondere wenn keine externen visuellen Hinweise verfügbar sind.
Zur Messung und Steuerung der Lage werden Systeme wie Gyroskope, Beschleunigungsmesser und Magnetometer eingesetzt, die oft in ein Inertialnavigationssystem (INS) integriert sind. Diese Systeme arbeiten mit externen Datenquellen wie GNSS oder Sternenfolgern zusammen, um eine genaue Ausrichtung aufrechtzuerhalten.
Das Verständnis und die Steuerung der Lage ist besonders wichtig in dynamischen Umgebungen, in denen externe Kräfte wie Wind, Wellen oder Gravitationsanomalien die Flugbahn eines Fahrzeugs beeinflussen können.
Eine effektive Lageregelung gewährleistet daher eine sichere und effiziente Fahrt, sodass Fahrzeuge ihre Navigationsziele präzise erreichen können.
GNSS-Lagebestimmungslösungen
GNSS-Lagebestimmungslösungen liefern die Roll-, Nick- und Gierwinkel (Roll, Pitch und Yaw), die die Ausrichtung eines Objekts im Raum beschreiben. Diese drei Komponenten sind unerlässlich, um die Lage des Objekts relativ zur Erdoberfläche oder einem Bezugssystem zu verstehen.
- Roll bezieht sich auf die Drehung um die Vorwärtsachse, die die Neigung des Objekts nach links und rechts beeinflusst.
- Nicken ist die Drehung um die Querachse, die die Auf- und Abwärtsneigung bestimmt.
- Yaw ist die Drehung um die vertikale Achse, die die Richtung definiert, in die das Objekt zeigt.
Diese Lösungen kombinieren Daten von GNSS-Empfängern mit zusätzlichen Sensoren wie Beschleunigungsmessern und Gyroskopen, um hochgenaue und zuverlässige Lageinformationen zu liefern.
Dieser Ansatz ist besonders wertvoll in Umgebungen, in denen eine präzise Orientierung entscheidend ist, wie z. B. in Navigationssystemen für Flugzeuge, Schiffe und autonome Fahrzeuge. Durch die Integration dieser verschiedenen Sensoreingaben stellt das System eine optimale Leistung auch unter schwierigen Bedingungen sicher.
Lagedarstellungen
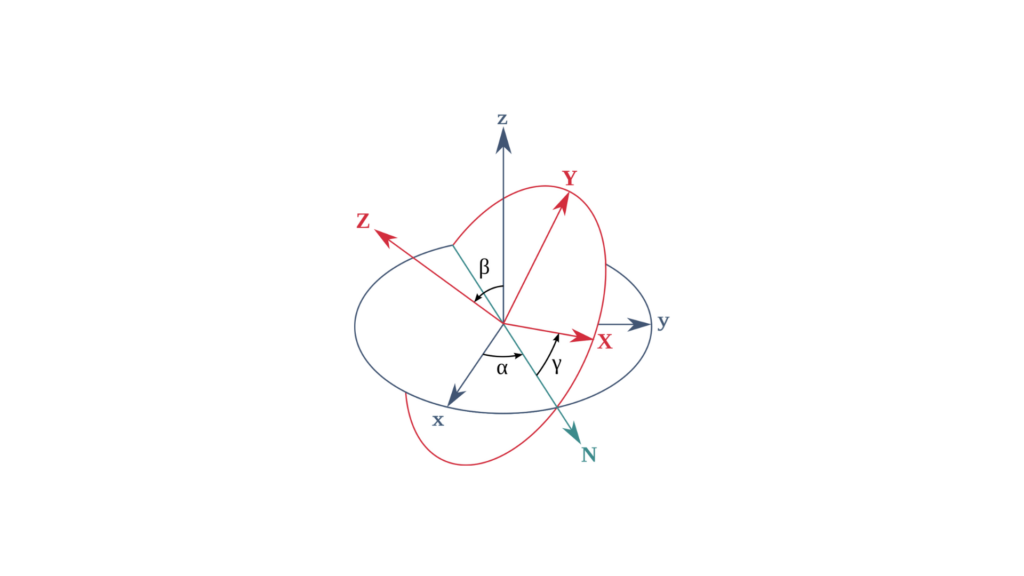
Die Lage beschreibt die Orientierung oder Drehung eines Objekts relativ zu einem Referenzrahmen, wie z.B. der Erdoberfläche. In Navigationssystemen ist dieses Konzept entscheidend für die Bestimmung der räumlichen Orientierung des Objekts, was für Flugzeuge, UAVs, Schiffe oder andere autonome Systeme relevant sein kann. Es gibt verschiedene Möglichkeiten, die Lage mathematisch und visuell darzustellen.
1 – Euler-Winkel (Roll, Pitch, Yaw)
Euler-Winkel stellen die Orientierung eines Objekts durch drei Drehungen dar: Roll, Pitch und Yaw. Diese Winkel beschreiben Drehungen um drei Achsen in einer bestimmten Reihenfolge, wie z. B.:
Roll (φ): Drehung um die Vorwärts-Rückwärts-Achse.
Pitch (θ): Drehung um die Querachse.
Yaw (ψ): Drehung um die vertikale Achse.
Mathematische Darstellung
Euler-Winkel können als 3×3-Drehmatrix dargestellt werden, wobei:
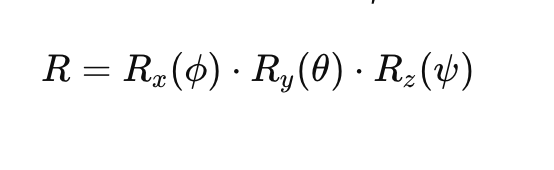
Hier:
- Rx(ϕ)R_x(\phi)Rx(ϕ) ist die Rotationsmatrix für Rollen.
- Ry(θ)R_y(\theta)Ry(θ) ist die Rotationsmatrix für Nicken.
- Rz(ψ)R_z(\psi)Rz(ψ) ist die Rotationsmatrix für Gieren.
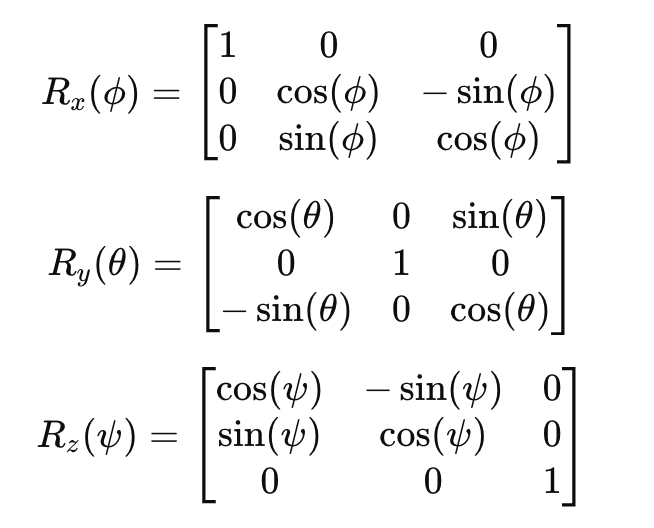
Jede Rotationsmatrix ist gegeben als:
2 – Rotationsmatrizen
Rotationsmatrizen bieten eine alternative Möglichkeit, die Lage darzustellen. Bei dieser Methode beschreibt eine 3x3-Matrix die Orientierung eines Objekts im 3D-Raum relativ zu einem festen Koordinatensystem. Diese Matrizen sind orthogonal, d. h. die Zeilen und Spalten sind Einheitsvektoren. Folglich ist die Inverse der Matrix einfach ihre Transponierte.
Mathematische Darstellung
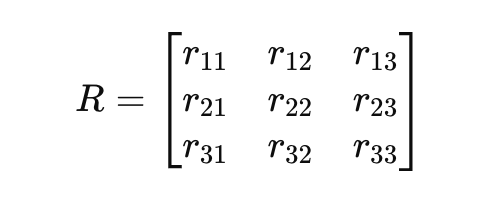
Sie können eine allgemeine Rotationsmatrix 𝑅 wie folgt schreiben:
3 – Quaternionen
Quaternionen bieten eine kompaktere und numerisch stabilere Darstellung der Rotation. Sie vermeiden Singularitäten und Gimbal-Lock-Probleme, die mit Euler-Winkeln verbunden sind. Ein Quaternion 𝑞 ist ein 4-dimensionaler Vektor:
Wobei 𝑞0 der skalare Teil ist und [𝑞1, 𝑞2, 𝑞3] die Vektorkomponenten sind. Die Quaterniondarstellung einer Rotation kann wie folgt geschrieben werden:

Hier:
- θ ist der Drehwinkel.
- [vx,vy,vz] ist der Einheitsvektor, der die Drehachse darstellt.
- i, j, k sind die fundamentalen Quaternionseinheiten.
Vorteile von Quaternionen:
- Vermeidet Gimbal Lock und Singularitäten.
- Rechentechnisch effizienter für die Interpolation.
4 – Richtungskosinusmatrizen (DCM)
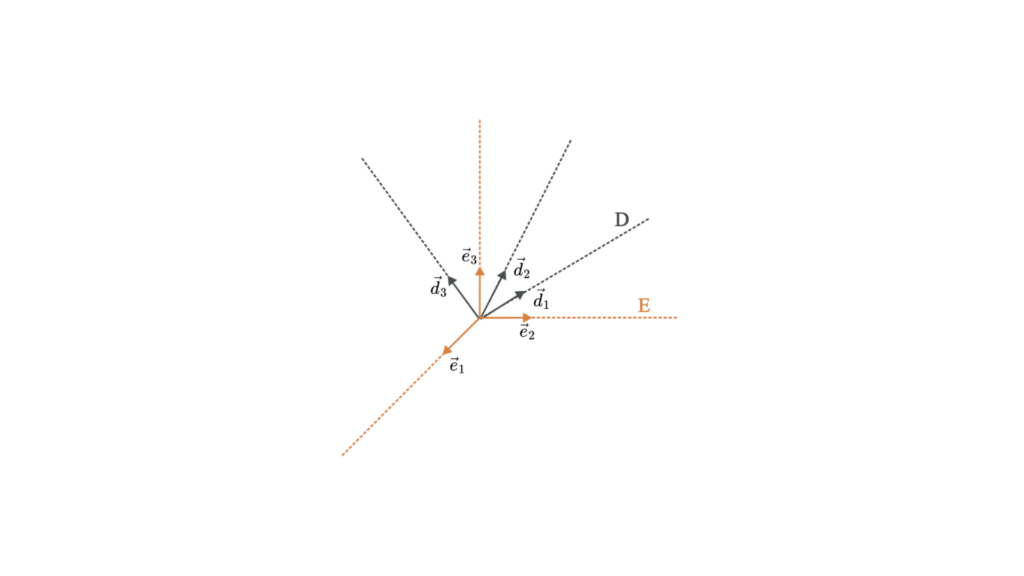
Eine Richtungskosinusmatrix ist ähnlich einer Rotationsmatrix und beschreibt ebenfalls die Orientierung eines Objekts. Die DCM bezieht die Koordinaten eines Vektors in einem Frame auf die Koordinaten desselben Vektors in einem anderen Frame.
Mathematische Darstellung
Eine Richtungskosinusmatrix 𝐶 ist eine 3×3-Matrix, die die Beziehung zwischen zwei Koordinatensystemen definiert:
Wobei die Elemente cos (⋅) den Kosinus des Winkels zwischen den Vektoren der beiden Koordinatensysteme darstellen.
Erzählen Sie uns von Ihrem Projekt