Hochpräzise Navigation für autonome Fahrzeuge
Inertial Navigation Systems (INS) bieten zahlreiche Vorteile für autonome Fahrzeuganwendungen. Durch die Verwendung von Sensoren wie Beschleunigungsmessern und Gyroskopen liefern INS-Lösungen kontinuierliche und genaue Navigationsdaten, ohne auf externe Signale angewiesen zu sein.
Unsere INS liefern Echtzeit-Updates zur Position, Geschwindigkeit und Orientierung des Fahrzeugs und gewährleisten so eine genaue Navigation auch in GNSS-verweigerten Umgebungen. Wir haben fortschrittliche Algorithmen entwickelt, um Fehler im Laufe der Zeit zu minimieren und die Genauigkeit der Fahrzeugpositionierung aufrechtzuerhalten.

Robustheit in anspruchsvollen Umgebungen
Unser INS arbeitet zuverlässig in GNSS-kritischen Gebieten, einschliesslich Tunneln, städtischen Schluchten und dichtem Blätterdach. Es schützt vor Signalstörungen und Spoofing und ergänzt GNSS, um die Navigationssicherheit zu erhöhen.
Das System liefert sofortiges Feedback zur Fahrzeugbewegung und ermöglicht so eine schnelle Entscheidungsfindung und adaptive Reaktionen. Ohne auf externe Signale angewiesen zu sein, funktioniert unser INS kontinuierlich und ist ideal für dynamische Umgebungen. Es generiert präzise Daten für fortschrittliche Algorithmen wie Pfadplanung, Hindernisvermeidung und Routenoptimierung. Folglich erreichen autonome Systeme einen reibungsloseren und effizienteren Betrieb.
Darüber hinaus behält es eine konstante Leistung unabhängig von Wetter, Gelände oder Signalstörungen bei. Im Wesentlichen stärkt unser INS die Autonomie, gewährleistet eine zuverlässige Navigation und ermöglicht es Fahrzeugen, unter allen Bedingungen sicher und effizient zu arbeiten.

Echtzeitdaten und Sensorfusion
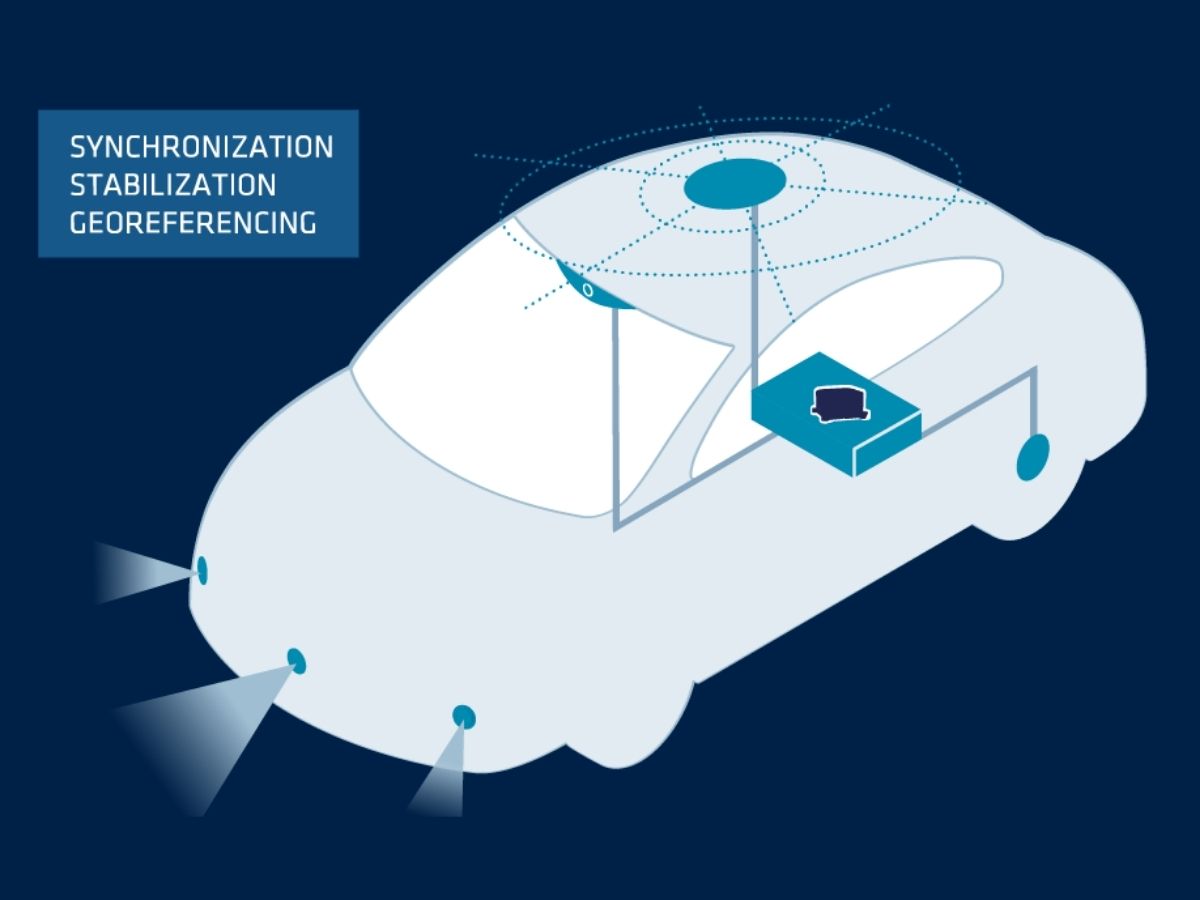
Unsere Sensoren liefern Echtzeit-Bewegungs- und Orientierungsdaten, sodass autonome Fahrzeuge sofortige Anpassungen an Lenkung, Beschleunigung und Bremsen vornehmen können, um auf Veränderungen in Gelände, Straßenbedingungen oder Verkehr zu reagieren. Es hilft auch, Stabilität und Kontrolle zu erhalten.
In Kombination mit anderen Navigationshilfen (z. B. GNSS, LiDAR, Kameras) verbessern sie die Gesamtgenauigkeit und -zuverlässigkeit. Diese Sensordatenfusion verbessert das Situationsbewusstsein und die Entscheidungsfindung. Durch die Integration von Daten aus mehreren Sensoren können unsere INS helfen, Ungenauigkeiten zu korrigieren, die durch externe Faktoren verursacht werden, und so eine zuverlässigere Navigation gewährleisten.
Entdecken Sie unsere Lösungen für autonome Fahrzeuge
Unsere Lösungen lassen sich nahtlos in UGV-Plattformen integrieren, um selbst unter schwierigsten Bedingungen eine zuverlässige Leistung zu erzielen.

Ellipse-D

Ekinox Micro

Ekinox-D
Broschüre für autonome Anwendungen
Erhalten Sie unsere Broschüre direkt in Ihren Posteingang!
Fallstudien
Erfahren Sie in unseren Fallstudien, wie die Inertiallösungen von SBG Systems die Technologie autonomer Fahrzeuge revolutionieren. Diese Erfolgsgeschichten aus der Praxis zeigen, wie unsere fortschrittlichen Trägheitssensoren eine präzise Navigation und Zuverlässigkeit in anspruchsvollen Umgebungen gewährleisten. Von der Verbesserung der Fahrzeugsicherheit im urbanen Umfeld bis zur Optimierung der Leistung in GNSS-verweigernden Szenarien ermöglichen unsere Lösungen autonomen Fahrzeugen einen Betrieb mit unübertroffener Genauigkeit und Kontrolle.
Jede Fallstudie bietet wertvolle Einblicke in die innovativen Wege, wie unsere Technologie die Zukunft des autonomen Transports vorantreibt.






Sie reden über uns
Hören Sie aus erster Hand von den Innovatoren und Kunden, die unsere Technologie übernommen haben.
Ihre Erfahrungsberichte und Erfolgsgeschichten verdeutlichen den bedeutenden Einfluss unserer Sensoren in praktischen Anwendungen für autonome Fahrzeuge.
Weitere Anwendungen mit autonomen Trägheitssystemen erkunden
Entdecken Sie, wie autonome Trägheitssysteme den Betrieb in verschiedenen Branchen verändern. Von Robotik und industrieller Automatisierung bis hin zu Bergbau und Logistik liefern unsere Hochleistungslösungen präzise Navigations-, Orientierungs- und Bewegungsdaten—auch in GNSS-ungünstigen Umgebungen. Entdecken Sie neue Möglichkeiten, die durch zuverlässige Autonomie ermöglicht werden.
Haben Sie Fragen?
Hier finden Sie Antworten auf die häufigsten Fragen zu den von uns vorgestellten Anwendungen. Sollten Sie nicht finden, was Sie suchen, zögern Sie bitte nicht, sich direkt an uns zu wenden, um Unterstützung zu erhalten.
Was sind die Autonomiegrade von autonomen Fahrzeugen?
Die Autonomiestufen autonomer Fahrzeuge werden von der Society of Automotive Engineers (SAE) in sechs Stufen (Stufe 0 bis Stufe 5) eingeteilt, die den Grad der Automatisierung im Fahrzeugbetrieb definieren. Hier ist eine Aufschlüsselung:
- Level 0: Keine Automatisierung – Der menschliche Fahrer steuert das Fahrzeug jederzeit vollständig, wobei nur passive Systeme wie Warnmeldungen und Warnungen vorhanden sind.
- Level 1: Fahrerassistenz – Das Fahrzeug kann entweder beim Lenken oder beim Beschleunigen/Verlangsamen helfen, aber der menschliche Fahrer muss die Kontrolle behalten und die Umgebung überwachen (z. B. adaptive Geschwindigkeitsregelung).
- Level 2: Teilautomation – Das Fahrzeug kann sowohl Lenkung als auch Beschleunigung/Verzögerung gleichzeitig steuern, aber der Fahrer muss jederzeit aufmerksam bleiben und bereit sein, die Kontrolle zu übernehmen (z. B. Tesla Autopilot, GM Super Cruise).
- Level 3: Bedingte Automatisierung – Das Fahrzeug kann alle Aspekte des Fahrens unter bestimmten Bedingungen übernehmen, aber der menschliche Fahrer muss bereit sein, einzugreifen, wenn er vom System dazu aufgefordert wird (z. B. Autobahnfahrt). Der Fahrer muss nicht aktiv überwachen, muss aber aufmerksam bleiben.
- Level 4: Hohe Automatisierung – Das Fahrzeug kann alle Fahraufgaben innerhalb spezifischer Bedingungen oder Umgebungen (wie Stadtgebiete oder Autobahnen) ohne menschliches Zutun autonom ausführen. In anderen Umgebungen oder unter besonderen Umständen kann es jedoch erforderlich sein, dass ein Mensch fährt.
- Level 5: Vollständige Automatisierung – Das Fahrzeug ist vollkommen autonom und kann alle Fahraufgaben unter allen Bedingungen ohne menschliches Zutun bewältigen. Es ist kein Fahrer erforderlich, und das Fahrzeug kann überall und unter allen Bedingungen eingesetzt werden.
Diese Stufen helfen, die Entwicklung der autonomen Fahrzeugtechnologie zu definieren, von der grundlegenden Fahrerassistenz bis zur vollständigen Autonomie.
Was ist ein Wegstreckenzähler?
Ein Kilometerzähler ist ein Instrument zur Messung der von einem Fahrzeug zurückgelegten Strecke. Er liefert wichtige Informationen darüber, wie weit ein Fahrzeug gefahren ist, was für verschiedene Zwecke nützlich ist, z. B. für die Wartungsplanung, die Berechnung des Kraftstoffverbrauchs und die Bewertung des Wiederverkaufswerts.
Odometers messen die Entfernung basierend auf der Anzahl der Umdrehungen der Fahrzeugräder. Ein Kalibrierungsfaktor, basierend auf der Reifengröße, wandelt die Radumdrehungen in eine Entfernung um.
In vielen Navigationsanwendungen, insbesondere in Fahrzeugen, können Odometriedaten mit INS-Daten integriert werden, um die Gesamtgenauigkeit zu verbessern. Dieser Prozess, der als Sensorfusion bezeichnet wird, kombiniert die Stärken beider Systeme.
Was bedeuten Jamming und Spoofing?
Jamming und Spoofing sind zwei Arten von Störungen, die die Zuverlässigkeit und Genauigkeit von satellitengestützten Navigationssystemen wie GNSS erheblich beeinträchtigen können.
Jamming bezieht sich auf die absichtliche Störung von Satellitensignalen durch das Senden von Störsignalen auf denselben Frequenzen, die von GNSS-Systemen verwendet werden. Diese Interferenz kann die legitimen Satellitensignale überlagern oder übertönen, wodurch GNSS-Empfänger die Informationen nicht mehr genau verarbeiten können. Jamming wird häufig bei Militäroperationen eingesetzt, um die Navigationsfähigkeiten von Gegnern zu stören, und kann auch zivile Systeme beeinträchtigen, was zu Navigationsausfällen und betrieblichen Herausforderungen führt.
Spoofing hingegen beinhaltet die Übertragung gefälschter Signale, die echte GNSS-Signale imitieren. Diese täuschenden Signale können GNSS-Empfänger dazu verleiten, falsche Positionen oder Zeiten zu berechnen. Spoofing kann verwendet werden, um Navigationssysteme in die Irre zu führen oder falsch zu informieren, was möglicherweise dazu führt, dass Fahrzeuge oder Flugzeuge vom Kurs abkommen oder falsche Standortdaten liefern. Im Gegensatz zu Jamming, das lediglich den Signalempfang behindert, täuscht Spoofing den Empfänger aktiv, indem es falsche Informationen als legitim darstellt.
Sowohl Jamming als auch Spoofing stellen erhebliche Bedrohungen für die Integrität GNSS-abhängiger Systeme dar, was fortschrittliche Gegenmaßnahmen und robuste Navigationstechnologien erforderlich macht, um einen zuverlässigen Betrieb in umkämpften oder herausfordernden Umgebungen zu gewährleisten.
Was ist Koppelnavigation?
Koppelnavigation ist eine Navigationsmethode, die die aktuelle Position eines Fahrzeugs durch kontinuierliche Fortschreibung einer bekannten früheren Position unter Verwendung gemessener Bewegungsinformationen bestimmt, ohne auf externe Signale wie GPS angewiesen zu sein.
In der Praxis beginnt das System an einem Referenzpunkt – oft die letzte bekannte genaue Position – und verwendet bordeigene Sensoren wie Beschleunigungsmesser, Gyroskope, Raddistanzmessung oder Geschwindigkeitslogger, um abzuschätzen, wie sich das Fahrzeug im Laufe der Zeit bewegt hat. Durch die Integration dieser Bewegungsmessungen berechnet die Koppelnavigation Änderungen in Geschwindigkeit, Ausrichtung und Verschiebung und erstellt schrittweise eine aktualisierte Positionsschätzung. Sie bietet zwar eine vollständig autonome Navigation, selbst in GPS-verweigerten oder beeinträchtigten Umgebungen, aber die Koppelnavigation unterliegt von Natur aus einer Fehlerakkumulation: kleine Sensorabweichungen, Skalenfaktorfehler oder Umwelteinflüsse nehmen im Laufe der Zeit zu, wodurch die geschätzte Trajektorie von der Realität abweicht.
Um diese Abweichung zu mindern, wird die Koppelnavigation oft mit externen Hilfsmitteln wie GNSS, Magnetometern, Barometern oder Geländeanpassungstechniken in modernen inertialen Navigationssystemen kombiniert. Trotz ihrer Einschränkungen bleibt die Koppelnavigation ein grundlegendes Prinzip in der Navigation, da sie eine kontinuierliche Echtzeit-Positionierung gewährleistet, selbst wenn absolute Referenzen nicht verfügbar sind.
Was ist ein Inertialnavigationssystem?
Ein INS ist eine autonome Navigationslösung, die die Position, Geschwindigkeit und Orientierung einer beweglichen Plattform durch kontinuierliche Messung ihrer Bewegung mittels Trägheitssensoren bestimmt. Im Kern basiert ein INS auf einem Triad von Beschleunigungsmessern, um lineare Beschleunigungen entlang dreier senkrechter Achsen zu erfassen, und einem Triad von Gyroskopen, um Winkelgeschwindigkeiten um dieselben Achsen zu messen. Durch die Integration dieser Messungen über die Zeit berechnet das System, wie sich Geschwindigkeit, Lage und Position der Plattform von einem bekannten Startpunkt aus entwickeln.
Da ein INS nicht von externen Signalen wie GPS, Funkfeuern oder visuellen Referenzen abhängt, kann es zuverlässig in Umgebungen betrieben werden, in denen externe Navigationshilfen nicht verfügbar, verweigert oder beeinträchtigt sind – z. B. unter Wasser, in Innenräumen, unterirdisch oder in militärischen GNSS-Jamming-Szenarien.
Moderne INS integrieren typischerweise ausgeklügelte Filteralgorithmen, meist einen Kalman-Filter, um Rohsensordaten zu fusionieren, Drift zu mindern und den genauesten Navigationszustand zu schätzen. In vielen Anwendungen ist die INS mit GNSS gekoppelt, mit Odometern, Doppler Velocity Logs oder Magnetometern, um Langzeitdrift zu begrenzen und eine hochstabile Navigation zu liefern. Das Ergebnis ist eine robuste Navigationslösung mit hoher Aktualisierungsrate, die unerlässlich ist für Flugzeuge, UAVs, Raketen, autonome Fahrzeuge, Schiffe, AUVs und eine Vielzahl industrieller Systeme, die eine präzise, kontinuierliche Erfassung von Bewegung und Orientierung erfordern.
