
У цій першій статті з нашої серії «Опанування точності» ми розглянемо глобальні навігаційні супутникові системи (GNSS) та їхню автономну точність з урахуванням джерел похибок GNSS
Що таке GNSS ?
Супутникові системи позиціонування, такі як GPS, стали невід’ємною частиною нашого життя, допомагаючи нам орієнтуватися під час поїздок на автомобілі та піших прогулянок. Вони також відіграють важливу роль у таких різноманітних сферах, як безпілотні транспортні засоби, сільське господарство та геодезія.
Однак важливо перейти від терміна «GPS» до більш широкого поняттяGNSS(Глобальна навігаційна супутникова система), яке охоплює всі супутникові групи, а не лише GPS.
Наразі функціонують чотири глобальні супутникові системи (GPS, ГЛОНАСС, ГАЛІЛЕО, БЕЙДУ). Крім того, існують допоміжні системи, що обслуговують окремі регіони, наприклад індійська IRNSS, або доповнюють глобальні системи, як-от японська QZSS.
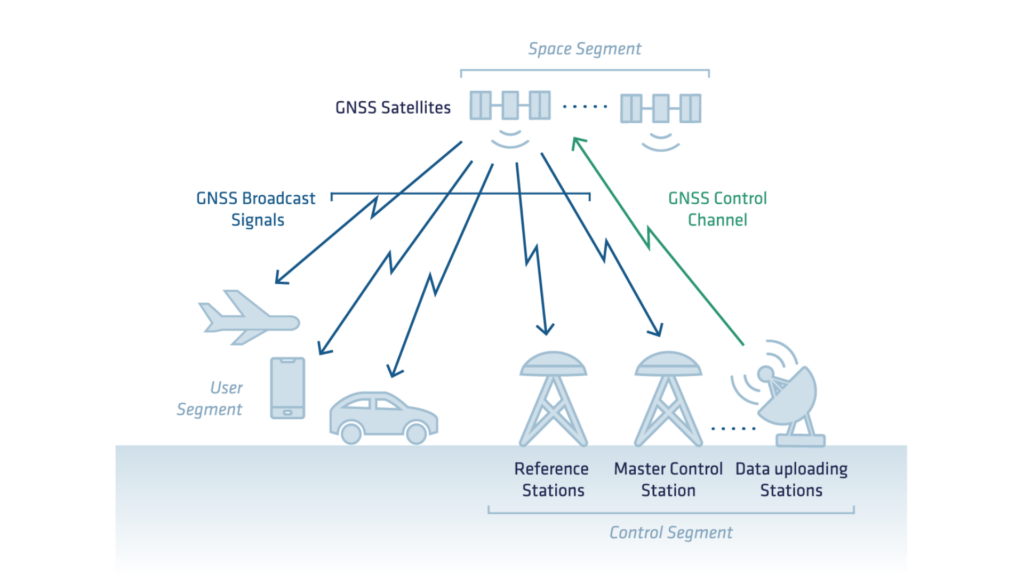
Окрім супутників, GNSS складається з інших важливих сегментів:
- Супутниковий сегмент, що складається з супутникової групи.
- Сегмент управління, що складається з наземних станцій управління та обладнання. Вони відповідають за моніторинг супутникових груп, визначення положення супутників та забезпечення їх безперебійної та коректної роботи.
- Сегмент користувачів, що включає обладнання, яке використовується для визначення координат на основі сигналів, отриманих від супутників.
GNSS принцип GNSS : трилатерація
GNSS положення та час приймача за допомогою трилатерації, використовуючи сигнали від декількох супутників.
Для обчислення положення система повинна визначити чотири величини: широту, довготу, висоту та час. Цей процес вимагає принаймні чотирьох супутників, хоча додаткові супутники підвищують точність і надійність.
На наступному зображенні показано, як працює трилатерація. Кожен супутник визначає сферу навколо себе, що представляє можливі відстані до приймача.
Другий супутник звужує можливі рішення до перетину цих двох сфер. Третій супутник ще більше уточнює рішення, дозволяючи системі точно визначити одне місце розташування. У реальних застосуваннях система також повинна враховувати час, що вимагає наявності четвертого супутника.
Сигнал, що випромінюється супутниками
GNSS передають сигнали в різних частотних діапазонах, таких як L1, L2, L5 та інших. GNSS складаються з трьох основних компонентів:
- Навігаційні дані (низькочастотні): обчислюються контрольним сегментом; ці дані містять важливу інформацію, таку як ефемериди (кеплерівські орбітальні параметри, необхідні для обчислення координат супутників), дані про корекцію годинника та додаткову інформацію. Вони завантажуються на супутник і транслюються по всьому світу на GNSS .
- Псевдовипадковий код (PRN-код): Кожен супутник передає унікальний псевдовипадковий код (PRN-код) — високочастотну детерміновану послідовність нулів і одиниць, побудовану за передбачуваним алгоритмом, щоб приймач міг її відтворити. Головною перевагою додавання PRN-коду є те, що він дозволяє декільком супутникам одночасно передавати сигнали на одній частоті, і приймач може їх розпізнати. Ця техніка, відома як кодовий множинний доступ (CDMA), призначає кожному супутнику унікальний псевдовипадковий код. Тільки Glonass використовує FDMA (частотний множинний доступ), де кожен супутник має дещо іншу частоту.
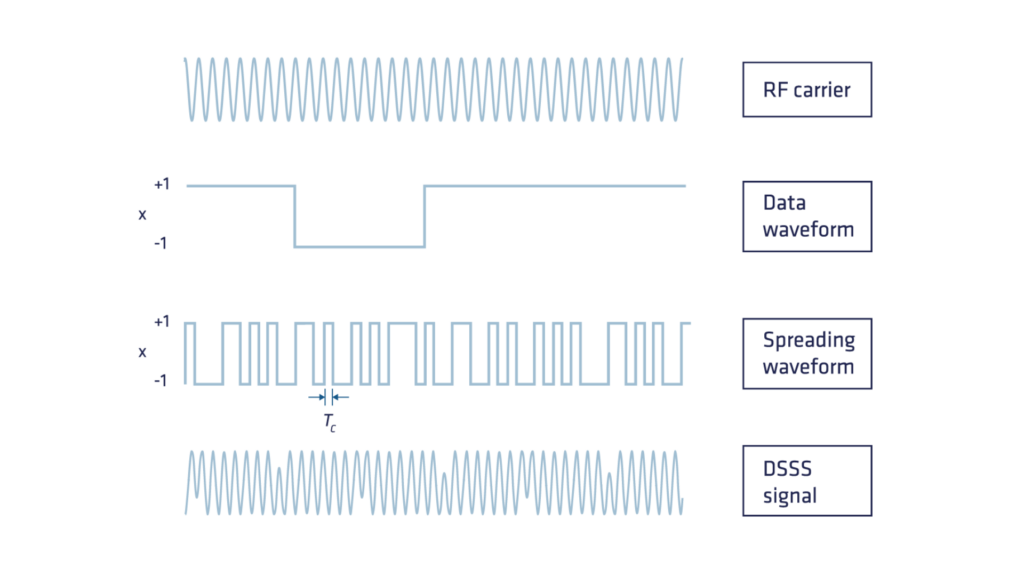
- Радіочастотна несуча хвиля: синусоїдальний сигнал, спочатку призначений для передачі комбінованого сигналу, що складається з навігаційних даних та коду PRN. Пізніше ми побачимо, як ця складова еволюціонує і стає основою GNSS , забезпечуючи точність позиціонування на рівні сантиметрів.
Вимірювання відстані до супутника: код і фаза несучої
Спочатку система GPS була розроблена таким чином, що приймач використовував копію коду PRN та методи автокореляції для обчислення відстані від супутника до приймача з точністю до декількох сантиметрів. Однак несуча хвиля, спочатку призначена для передачі коду PRN, виявилася цінним ресурсом.
Вимірювання фази несучої хвилі, хоча й є більш точним, призвело до появи неоднозначності у визначенні відстані між супутником і приймачем. Нижче наведено детальніший огляд обох методів вимірювання.
Обчислення дальності зв'язку між супутником і приймачем за допомогою коду PRN
GNSS використовує процес, який називається «контуром фіксації затримки» (Delay Lock Loop), для визначення часової затримки між переданим і прийнятим кодом. Ця часова затримка, що відповідає часу поширення сигналу, потім перетворюється на відстань шляхом множення на швидкість світла.
Однак через відсутність синхронізації годинників приймача та супутника отримана відстань називається псевдодалечістю. Окрім помилки синхронізації годинників, на псевдодальність впливають кілька інших помилок, пов'язаних із середовищем поширення (атмосфера, апаратне забезпечення тощо), про що йтиметься далі в статті.
Покращення дальності зв'язку «супутник-приймач»: вимірювання фази несучої
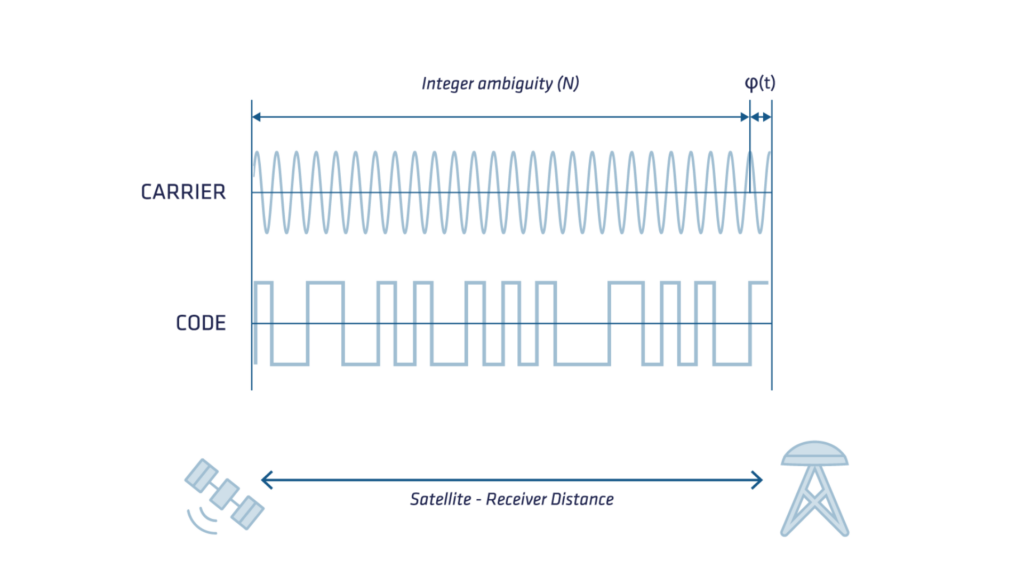
Відстань між супутником і приймачем також можна визначити, підрахувавши кількість фазових циклів, що минули між моментом випромінювання сигналу та моментом його прийому, і помноживши це значення на довжину хвилі несучої.
Це вимірювання є на два порядки точнішим, ніж кодове, але на його абсолютну точність впливає невідоме ціле число циклів (також відоме як неоднозначність). Щоб визначити точну еволюцію фази несучої хвилі, GNSS накопичує доплерівські зсуви частоти в несучій хвилі, спричинені відносним рухом супутника до приймача.
У разі переривання сигналу цей процес накопичення не може врахувати фактичний рух, і в вимірюванні можуть спостерігатися різкі стрибки, також відомі як «циклові зсуви».
Правильне поводження з циклічними зсувами та неоднозначністю є складними та ключовими аспектами методів точного позиціонування, таких як кінематика в реальному часі (RTK) та точне точкове позиціонування (PPP).
На наступній діаграмі показано несучу хвилю сигналу, код та їхні відповідні роздільні здатності.
Джерела похибок у GNSS
Спочатку точність GPS для широкого загалу (невійськового використання) становила приблизно 100 м. Після багаторічного розвитку (скасування функції «селективної доступності», розгортання нових супутникових груп та систем SBAS, запуску нових супутників і використання нових частот) точність автономної GNSS зараз GNSS від 5 м для GNSS початкового рівня до 1 м для приймачів високого класу.
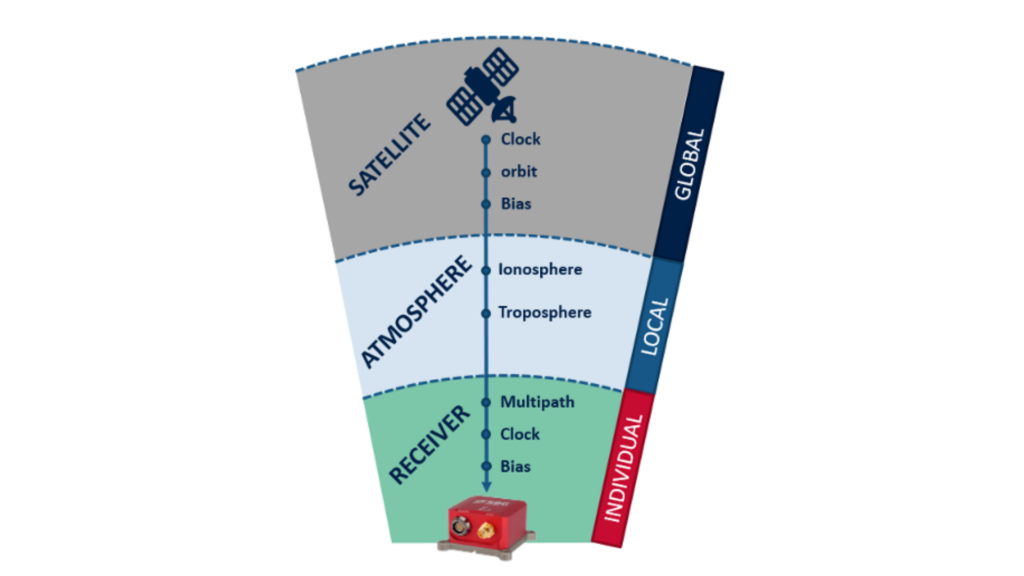
Помилки супутника
- Похибки годинника: Хоча атомні годинники на GNSS мають високу точність, вони все ж піддаються незначному дрейфу. На жаль, навіть незначне відхилення в роботі супутникового годинника може призвести до суттєвої похибки в розрахунковому положенні, визначеному приймачем. Наприклад, похибка годинника всього в 10 наносекунд призводить до похибки в визначенні положення на 3 метри при вимірюванні відстані!
- Похибки орбіти: хоча GNSS рухаються по надзвичайно точним і добре задокументованим орбітам, ці орбіти зазнають незначних відхилень, подібно до годинників супутників. Як і у випадку з неточностями годинників, навіть незначна зміна орбіти супутника може спричинити значну похибку в обчисленій позиції. Залишкові похибки орбіти зберігаються, що призводить до потенційних похибок у визначенні позиції до ±2,5 метрів.
Помилки, пов’язані з атмосферними умовами
- Іоносферна затримка: Іоносфера, що розташована на висоті від 50 до 1000 км над поверхнею Землі, містить заряджені іони, які впливають на передачу радіосигналів, спричиняючи похибки у визначенні координат (зазвичай ±5 метрів, а під час підвищеної іоносферної активності — більше). Іоносферна затримка залежить від сонячної активності, часу доби, пори року та місцезнаходження, що ускладнює прогнозування.
- Тропосферна затримка: У найнижчому шарі атмосфери Землі, тропосфері, спостерігаються коливання затримки, зумовлені змінами вологості, температури та атмосферного тиску.
Помилки приймача
Внутрішній годинник приймача, який є менш точним порівняно з атомним годинником супутника, а також інші апаратні та програмні помилки додають до вимірювань шум і похибку.
| Затримка | Походження | Величина |
|---|---|---|
| Похибка положення | Супутник | 5m |
| Зсув годинника | Супутник | 0–300 км |
| Інструментальна затримка | Супутник | 1–10 м |
| Релятивістський ефект | Супутник | 10 m |
| Іоносферна затримка | Маршрут (50–1000 км) | 2–50 м |
| Тропосферна затримка | Маршрут (0–12 км) | 2–10 м |
| Інструментальна затримка | Приймач | 1–10 м |
| Зсув часу | Приймач | 0–300 км |
Для забезпечення оптимальної навігації система повинна враховувати ці похибки, зменшувати їх за допомогою спеціальної моделі похибок або оцінювати їх за допомогою навігаційного фільтра.
При обчисленні координат також слід враховувати багато інших джерел похибок, не зазначених у цій статті, таких як припливні ефекти та релятивістські ефекти.
Різні джерела похибок впливають на ефективність GNSS , яка забезпечує високу точність визначення координат, навігації та синхронізації.
Такі фактори, як атмосферні затримки, похибки годинника супутника та ефемерид, багатопроменеві перешкоди та шум приймача, можуть погіршувати точність. Хоча сучасні методи корекції (диференціальна GNSS, RTK та PPP) допомагають зменшити вплив GNSS їх джерел похибок, розуміння їх походження залишається важливим для оптимізації GNSS .
У міру розвитку технологій обробки сигналів, об'єднання даних датчиків та машинного навчання GNSS ставатимуть ще більш надійними, забезпечуючи вищу надійність у різноманітних сферах застосування.
