
Розширений фільтр Калмана (EKF) — це потужний інструмент, який використовується в системах навігації та керування для оцінювання стану системи, що змінюється з часом. Він є розширенням фільтра Калмана, розробленим для роботи з нелінійними системами, що робить його незамінним для застосувань, де взаємозв’язок між змінними не є лінійним.
Цей потужний алгоритм використовується для оцінки стану динамічної системи на основі вимірювань датчиків, що містять шум. Він базується на стандартному фільтрі Калмана, адаптуючись до нелінійних систем, які є типовими для реальних сценаріїв навігації. Хоча традиційний фільтр Калмана передбачає лінійну динаміку та гаусівський шум, EKF долає ці обмеження шляхом лінеаризації нелінійної системи навколо поточної оцінки. Це дозволяє йому ефективно працювати в більш складних, реальних умовах.
Основний принцип роботи розширеного фільтра Калмана
В основі EKF лежить безперервне оновлення вектора стану — набору змінних, що описують поточний стан системи, таких як положення, швидкість та орієнтація в контексті навігації. Система спирається на модель процесу для прогнозування того, як стан змінюється з часом, враховуючи динаміку системи та вхідні сигнали управління. Тим часом модель вимірювання пов'язує вхідні дані датчиків з оціненим станом, а матриця коваріації відображає невизначеність як у прогнозах, так і в спостереженнях, допомагаючи EKF збалансувати впевненість між оцінками моделі та вхідними даними датчиків.
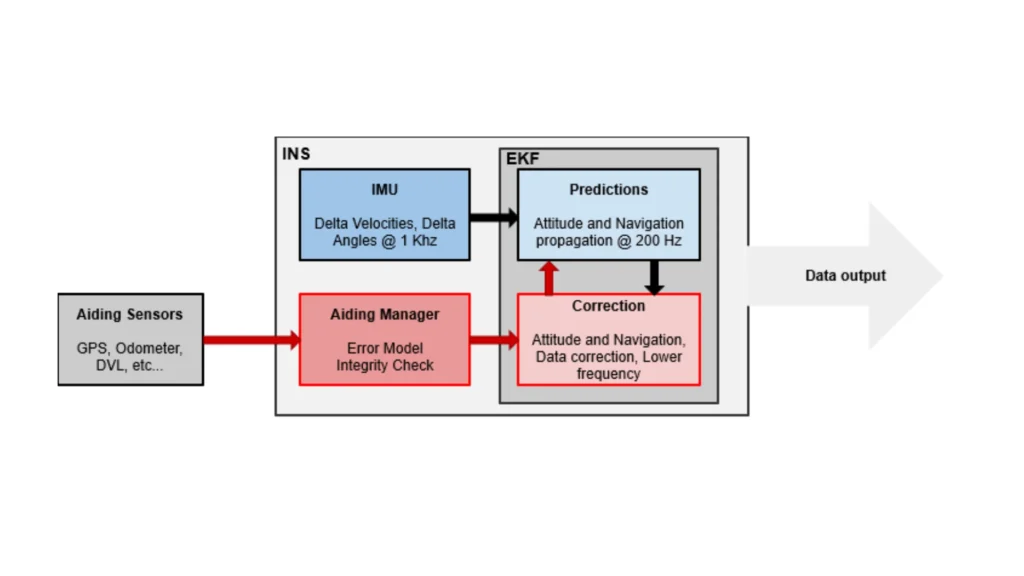
Фільтр працює у двох основних фазах: прогнозування та оновлення. Під час фази прогнозування він використовує модель процесу для прогнозування наступного стану та оцінки пов’язаної з ним невизначеності шляхом оновлення матриці коваріації. Для врахування нелінійності EKF лінеаризує як модель процесу, так і модель вимірювання за допомогою матриць Якобі — математичних представлень, що апроксимують поведінку системи поблизу поточної оцінки.
На етапі оновлення EKF враховує нові вимірювання датчиків для уточнення свого прогнозу. Він обчислює коефіцієнт Калмана, який визначає, яку вагу слід присвоїти новим вимірюванням порівняно з прогнозованим станом. Цей коефіцієнт дозволяє EKF відповідно скоригувати оцінку стану та оновити коваріацію, щоб відобразити зменшену невизначеність після вимірювання.
Застосування ЕКФ у сучасних системах
ЕКФ широко застосовується в сучасних навігаційних системах завдяки своїй здатності забезпечувати точні оцінки стану в умовах наявності шуму та складності системи. Наприклад, інерційні навігаційні системи (INS) базуються на акселерометрах і гіроскопах, які схильні до дрейфу та впливу шуму. ЕКФ об’єднує дані датчиків, щоб забезпечити стабільні оцінки положення, швидкості та орієнтації для динамічних платформ. Ці оцінки мають вирішальне значення для надійної роботи автономних транспортних засобів, літаків та інших мобільних систем.
У галузі робототехніки та автономних систем розширений фільтр Калмана (EKF) забезпечує надійну локалізацію та картографування. Роботи використовують такі датчики, як LiDAR або камери, для визначення свого положення та оновлення карт за допомогою розширеного фільтра Калмана (EKF). Це дозволяє здійснювати картографування та локалізацію в режимі реального часу, забезпечуючи безпечну та автономну роботу в незнайомих або мінливих умовах.
У авіакосмічній та оборонній галузях ЕКФ відіграє ключову роль у системах наведення та стеження. Він дозволяє літакам, ракетам і космічним апаратам підтримувати точне положення та траєкторію руху навіть за умов нелінійного руху. ЕКФ продовжує надійно працювати навіть під впливом зовнішніх збурень, які в іншому випадку могли б знизити точність навігації.
Технологія, на якій базується EKF, включає кілька ключових компонентів. Матриці Якобі забезпечують процес лінеаризації, тоді як сенсорна фузія інтегрує дані з різних джерел, щоб гарантувати стійкість і точність. Для забезпечення роботи в режимі реального часу EKF використовує ефективні обчислювальні алгоритми для матричних операцій, оновлення коваріації та інтеграції вимірювань.
Підсумовуючи, розширений фільтр Калмана (EKF) є незамінним інструментом у сучасних навігаційних системах. Завдяки розширенню можливостей фільтра Калмана для роботи з нелінійними системами можна отримати точну оцінку стану в режимі реального часу. Він застосовується в широкому спектрі галузей, зокрема в робототехніці, автомобільних системах ADAS, аерокосмічній галузі та системах оборони. Володіння принципами та технологіями EKF є ключовим фактором для розробки високоефективних навігаційних рішень у складних і динамічних середовищах.
