Prestazioni superiori in condizioni di bassa dinamicità
I sistemi di mobile mapping con IMU integrate forniscono dati in tempo reale, offrendo approfondimenti critici sulle dinamiche ambientali.
Questi sistemi consentono la creazione di mappe ad alta definizione (HD maps) per veicoli autonomi, migliorano l'accuratezza e riducono il rischio di lacune nei dati, rendendoli essenziali per applicazioni come la mappatura delle infrastrutture, i rilievi stradali e l'analisi ambientale.
Con l'integrazione avanzata di GNSS e sistemi inerziali, i sistemi di mobile mapping offrono una configurazione rapida e un'inizializzazione veloce, minimizzando i tempi di inattività e consentendo una rapida raccolta dati. Ciò è particolarmente prezioso in scenari sensibili al tempo, come i rilievi mobili delle infrastrutture o la mappatura per la risposta alle emergenze, dove un rapido dispiegamento è cruciale.
In ambienti a bassa dinamica, come veicoli che si muovono lentamente in aree urbane o al chiuso, i sistemi inerziali ad alte prestazioni mantengono dati precisi di posizionamento e orientamento. Mentre i sistemi GPS tradizionali possono avere difficoltà in tali condizioni, un INS integrato con GNSS assicura dati continui e affidabili, anche in ambienti privi di GNSS.
Questi sistemi garantiscono prestazioni costanti e forniscono modelli 3D accurati, mappe topografiche e prodotti geospaziali in qualsiasi ambiente. Mantengono l'accuratezza indipendentemente dalla velocità di movimento o dalla complessità ambientale.

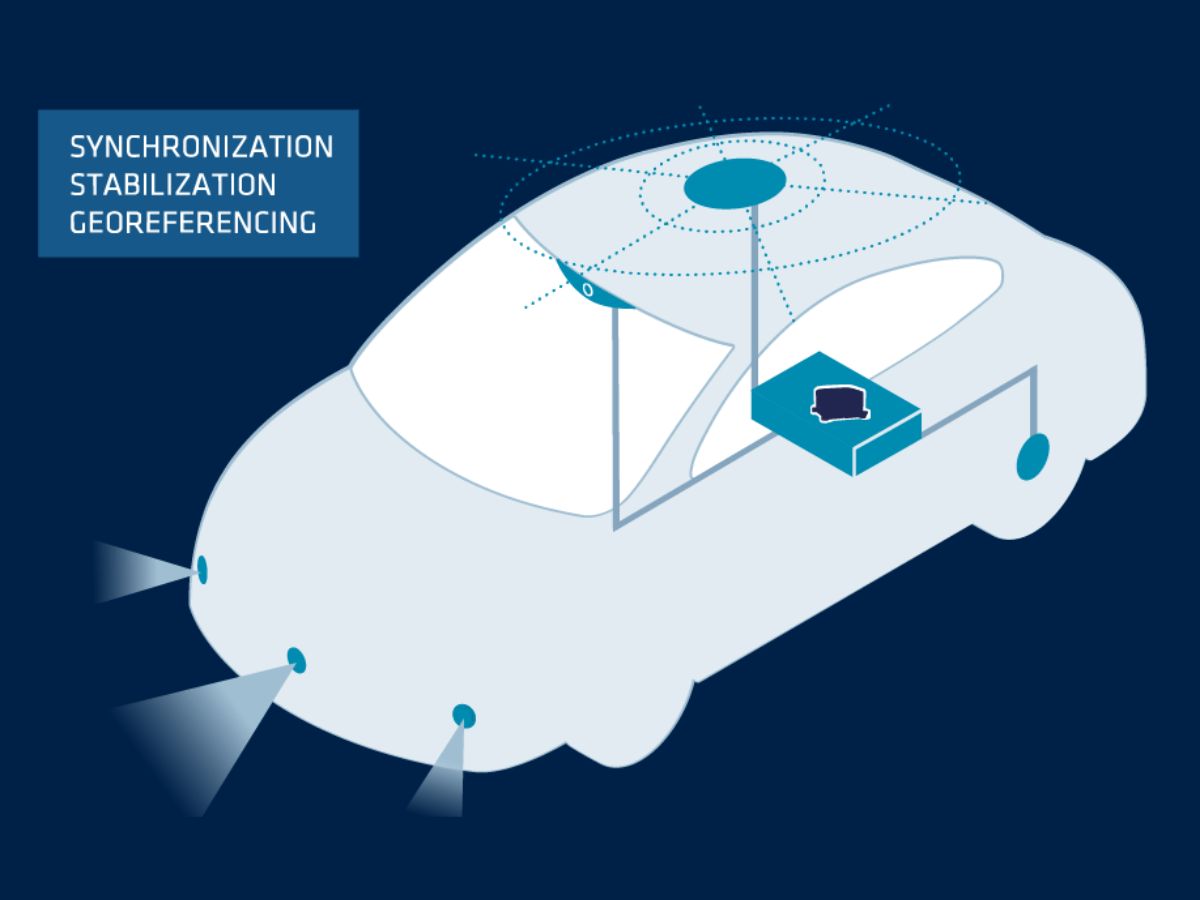
Interfaccia di comunicazione singola con sincronizzazione integrata
I nostri sistemi inerziali supportano un processo di integrazione semplificato con un'unica interfaccia di comunicazione. L'INS può fungere da hub centrale per i dati provenienti sia dai sensori GNSS che LiDAR. Utilizzando protocolli di comunicazione standard del settore, Ethernet o CAN bus, è possibile interfacciare l'INS con il ricevitore GNSS e il sistema LiDAR mobile, minimizzando la complessità hardware ed evitando la necessità di più collegamenti di comunicazione.
Le nostre soluzioni INS sono dotate di capacità di sincronizzazione integrate che garantiscono una fusione dati senza soluzione di continuità tra GNSS, LiDAR e dati inerziali.
L'INS può fungere da master clock PTP, sincronizzando i timestamp di tutti i sensori, il che è fondamentale per le operazioni SLAM. Utilizza le funzionalità di orologio in tempo reale (RTC) e la capacità di gestire la temporizzazione GNSS e i segnali di trigger esterni. L'INS garantirà che i dati GNSS e LiDAR siano allineati correttamente per un'accurata elaborazione SLAM.
Funzionalità in tempo reale e di post-elaborazione
I Sistemi di Mobile Mapping (MMS) offrono capacità sia in tempo reale che di post-elaborazione, consentendo agli utenti di accedere ai dati immediati e di affinare i risultati in seguito per una maggiore accuratezza.
L'acquisizione di dati in tempo reale permette a ingegneri o geometri di effettuare valutazioni sul posto, mentre il software di post-elaborazione assicura che il risultato finale sia il più accurato possibile. I sistemi inerziali contribuiscono in modo significativo a questo processo mantenendo dati di posizione coerenti e affidabili, anche quando i segnali satellitari non sono disponibili o sono degradati.
Le piattaforme di mobile mapping dotate di sistemi inerziali offrono flessibilità nella raccolta e nell'analisi dei dati. Gli operatori possono regolare i parametri al volo, assicurando che i loro progetti di mappatura soddisfino gli standard richiesti di accuratezza e precisione.
Offriamo Qinertia, un potente software di post-elaborazione che affina i dati GNSS e INS per una maggiore accuratezza della traiettoria. Qinertia completa i workflow di mappatura basati su SLAM migliorando precisione e affidabilità.

Scoprite le nostre soluzioni per il mobile mapping
I nostri sistemi di navigazione inerziale (INS) sono progettati specificamente per i mercati del rilevamento, offrendo alte prestazioni e facilità d'uso. Basati su sensori inerziali avanzati, integrano algoritmi all'avanguardia e tecnologia GNSS per fornire dati precisi di navigazione e posizionamento. I nostri sistemi sono altamente adattabili, con componenti configurabili per soddisfare specifiche esigenze applicative.

Ekinox-D

Apogee-D

Navsight Land-Air
Brochure sulle applicazioni di mappatura
Riceva la nostra brochure direttamente nella sua casella di posta!
Casi di studio
SBG Systems collabora con aziende leader per fornire soluzioni inerziali ad alte prestazioni per il mobile mapping.
I nostri case study evidenziano progetti di successo in cui la nostra tecnologia ha migliorato l'acquisizione e l'analisi dei dati.






Parlano di noi
Ascolta in prima persona gli innovatori e i clienti che hanno adottato la nostra tecnologia.
Le loro testimonianze e storie di successo illustrano il notevole impatto che i nostri sensori hanno nelle applicazioni pratiche dei veicoli autonomi.
Scopri altre applicazioni di rilevamento
SBG Systems fornisce sistemi di navigazione inerziale e sensori di movimento ad alte prestazioni per rilievi terrestri, marini e aerei. Le nostre soluzioni inerziali consentono ai professionisti del settore geospaziale di raccogliere dati precisi di posizione, orientamento e movimento in qualsiasi ambiente.
Esplorate le nostre applicazioni di rilevamento.
Ha delle domande?
La nostra sezione FAQ risponde alle domande più comuni sui sistemi di mobile mapping e sulle tecnologie che li supportano. Spiega anche le migliori pratiche e mostra come integrare i nostri prodotti nelle vostre soluzioni.
Cosa significa SLAM?
SLAM, che sta per Simultaneous Localization and Mapping (Localizzazione e Mappatura Simultanea), è una tecnica computazionale utilizzata nella robotica e nella visione artificiale per costruire una mappa di un ambiente sconosciuto, tenendo contemporaneamente traccia della posizione di un agente all'interno di tale ambiente. Questo è particolarmente utile in scenari in cui il GNSS non è disponibile, come indoor o in aree urbane dense.
I sistemi SLAM determinano la posizione e l'orientamento dell'agente in tempo reale. Ciò comporta il tracciamento del movimento del robot o del dispositivo mentre naviga nell'ambiente. Mentre l'agente si muove, il sistema SLAM crea una mappa dell'ambiente. Questa può essere una rappresentazione 2D o 3D, che cattura la disposizione, gli ostacoli e le caratteristiche dell'ambiente circostante.
Questi sistemi utilizzano spesso più sensori, come telecamere, LiDAR o unità di misura inerziale (IMU), per raccogliere dati sull'ambiente. Questi dati vengono combinati per migliorare l'accuratezza sia della localizzazione che della mappatura.
Gli algoritmi SLAM elaborano i dati in ingresso per aggiornare continuamente la mappa e la posizione dell'agente. Ciò comporta complessi calcoli matematici, comprese tecniche di filtraggio e ottimizzazione.
Cos'è il Real Time Kinematic?
Il Real-Time Kinematic (RTK) è una tecnica di navigazione satellitare precisa utilizzata per migliorare l'accuratezza dei dati di posizione derivati dalle misurazioni del Global Navigation Satellite System (GNSS). È ampiamente utilizzato in applicazioni quali il rilevamento, l'agricoltura e la navigazione di veicoli autonomi.
Utilizzando una stazione base che riceve i segnali GNSS e calcola la sua posizione con elevata precisione. Quindi trasmette i dati di correzione a uno o più ricevitori mobili (rover) in tempo reale. I rover utilizzano questi dati per regolare le loro letture GNSS, migliorando la loro precisione di posizionamento.
RTK fornisce un'accuratezza a livello di centimetro correggendo i segnali GNSS in tempo reale. Questo è significativamente più preciso del posizionamento GNSS standard, che in genere offre un'accuratezza entro pochi metri.
I dati di correzione provenienti dalla stazione base vengono inviati ai rover tramite vari metodi di comunicazione, come radio, reti cellulari o Internet. Questa comunicazione in tempo reale è fondamentale per mantenere la precisione durante le operazioni dinamiche.
Cos'è il Precise Point Positioning?
Il Precise Point Positioning (PPP) è una tecnica di navigazione satellitare che offre un posizionamento ad alta precisione correggendo gli errori del segnale satellitare. A differenza dei metodi GNSS tradizionali, che spesso si basano su stazioni di riferimento a terra (come in RTK), il PPP utilizza dati satellitari globali e algoritmi avanzati per fornire informazioni accurate sulla posizione.
Il PPP funziona ovunque nel mondo senza la necessità di stazioni di riferimento locali. Questo lo rende adatto per applicazioni in ambienti remoti o difficili dove mancano infrastrutture a terra. Utilizzando dati precisi sull'orbita e sull'orologio dei satelliti, insieme a correzioni per gli effetti atmosferici e multipath, il PPP minimizza gli errori GNSS comuni e può raggiungere un'accuratezza a livello di centimetro.
Mentre il PPP può essere utilizzato per il posizionamento post-processato, che implica l'analisi dei dati raccolti a posteriori, può anche fornire soluzioni di posizionamento in tempo reale. Il PPP in tempo reale (RTPPP) è sempre più disponibile, consentendo agli utenti di ricevere correzioni e determinare la loro posizione in tempo reale.
Cos'è un real time clock?
Un Real Time Clock (RTC) è un dispositivo elettronico progettato per tenere traccia dell'ora e della data correnti, anche quando è spento. Ampiamente utilizzati in applicazioni che richiedono un cronometraggio preciso, gli RTC svolgono diverse funzioni chiave.
In primo luogo, mantengono un conteggio accurato di secondi, minuti, ore, giorni, mesi e anni, spesso incorporando calcoli per gli anni bisestili e il giorno della settimana per una precisione a lungo termine. Gli RTC operano a bassa potenza e possono funzionare con una batteria di backup, consentendo loro di continuare a mantenere l'ora durante le interruzioni di corrente. Forniscono inoltre timestamp per le voci di dati e i log, garantendo una documentazione accurata.
Inoltre, gli RTC possono attivare operazioni programmate, consentendo ai sistemi di riattivarsi da stati a basso consumo energetico o di eseguire attività a orari specifici. Essi svolgono un ruolo cruciale nella sincronizzazione di più dispositivi (ad es. GNSS/INS), garantendo che operino in modo coeso.
Gli RTC sono parte integrante di vari dispositivi, dai computer alle apparecchiature industriali fino ai dispositivi IoT, migliorando la funzionalità e garantendo una gestione affidabile del tempo in molteplici applicazioni.
Come funziona il GPS?
Il GPS (Global Positioning System) funziona utilizzando una costellazione di satelliti, una temporizzazione precisa e la trilaterazione per determinare la posizione ovunque sulla Terra.
Ecco la spiegazione più semplice e chiara:
1 – I satelliti trasmettono segnali
Circa 30 satelliti GPS orbitano attorno alla Terra, ciascuno trasmettendo continuamente:
– La sua posizione esatta nello spazio
– L'ora esatta in cui il segnale è stato inviato (utilizzando orologi atomici)
Questi segnali viaggiano alla velocità della luce.
2 – Il ricevitore misura il tempo di propagazione
Un ricevitore GPS (nel telefono, drone, INS, ecc.) riceve segnali da più satelliti.
Misurando il tempo impiegato da ciascun segnale per arrivare, calcola la distanza:
distanza = velocità della luce × tempo di percorrenza
3 – La trilaterazione calcola la posizione
Per trovare la propria posizione, il ricevitore utilizza la trilaterazione (non la triangolazione):
- Con 1 satellite → potresti trovarti in qualsiasi punto di una sfera
- Con 2 satelliti → i cerchi si intersecano
- Con 3 satelliti → due punti possibili
- Con 4 satelliti → la tua posizione 3D esatta + correzione dell'orologio
Il suo ricevitore non dispone di un orologio atomico, quindi è necessario il quarto satellite per risolvere gli errori di temporizzazione.
4 – Le correzioni migliorano la precisione
Il GPS grezzo presenta errori dovuti a:
- Atmosfera (ionosfera, troposfera)
- Deriva dell'orologio satellitare
- Errori di previsione dell'orbita
- Riflessioni multipath (segnali che rimbalzano sugli edifici)
Per migliorare la precisione:
- SBAS (ad es. WAAS, EGNOS) fornisce correzioni in tempo reale
- Le tecniche RTK e PPP correggono gli errori fino al livello centimetrico
- L'accoppiamento INS (IMU + GPS) uniforma e colma le lacune durante la perdita di segnale
6 – Output finale
Il ricevitore combina tutti i dati per stimare:
- Latitudine
- Longitudine
- Altitudine
- Velocità
- Tempo preciso
I moderni ricevitori GPS lo fanno decine o centinaia di volte al secondo.
Cos'è la navigazione inerziale?
La navigazione inerziale è un metodo per determinare la posizione, l'orientamento e il movimento di un veicolo utilizzando solo sensori interni, senza fare affidamento su segnali esterni come il GPS. Fondamentalmente, un sistema di navigazione inerziale (INS) misura il movimento di un oggetto tracciando continuamente la sua accelerazione e rotazione in tre dimensioni. Utilizza una Inertial Measurement Unit (IMU), che contiene accelerometri per rilevare l'accelerazione lineare e giroscopi per misurare la velocità angolare. Integrando matematicamente queste misurazioni nel tempo, il sistema calcola velocità, assetto e, infine, posizione rispetto a un punto di partenza noto.
Essendo completamente autonomo, il sistema di navigazione inerziale funziona in qualsiasi ambiente — sottoterra, sott'acqua, nello spazio o in condizioni di assenza di GPS — rendendolo indispensabile per applicazioni come missili, aeromobili, sottomarini, veicoli autonomi e robotica. Le moderne soluzioni INS spesso combinano sensori inerziali con fonti di ausilio aggiuntive, come ricevitori GNSS, magnetometri, barometri o Doppler velocity logs, per ridurre la deriva e migliorare la precisione a lungo termine. Gli INS ad alte prestazioni si basano su una calibrazione precisa dei sensori, algoritmi di filtraggio avanzati e una modellazione robusta degli errori per fornire dati di navigazione stabili e affidabili anche negli ambienti più esigenti.
