Вища продуктивність за умов низької динаміки
Мобільні картографічні системи з вбудованими інерційними вимірювальними блоками (IMU) надають дані в режимі реального часу, забезпечуючи важливу інформацію про динаміку навколишнього середовища.
Ці системи дозволяють створювати карти високої чіткості (HD-карти) для автономних транспортних засобів, підвищують точність і зменшують ризик виникнення прогалин у даних, що робить їх незамінними для таких застосувань, як картографування інфраструктури, обстеження доріг та аналіз навколишнього середовища.
Завдяки вдосконаленій інтеграції GNSS інерційних систем мобільні картографічні системи забезпечують швидке налаштування та швидку ініціалізацію, мінімізуючи час простою та забезпечуючи швидкий збір даних. Це особливо цінно в ситуаціях, де час має вирішальне значення, таких як мобільні обстеження інфраструктури або картографування для реагування на надзвичайні ситуації, де швидке розгортання має вирішальне значення.
У середовищах з низькою динамікою, таких як транспортні засоби, що повільно рухаються міськими районами або в приміщеннях, високопродуктивні інерційні системи забезпечують точні дані про положення та орієнтацію. Хоча традиційні системи GPS можуть мати труднощі в таких умовах, INS з GNSS безперервність та надійність даних навіть уdenied .
Ці системи забезпечують стабільну продуктивність та надають точні 3D-моделі, топографічні карти та геопросторові продукти в будь-якому середовищі. Вони зберігають точність незалежно від швидкості руху або складності навколишнього середовища.

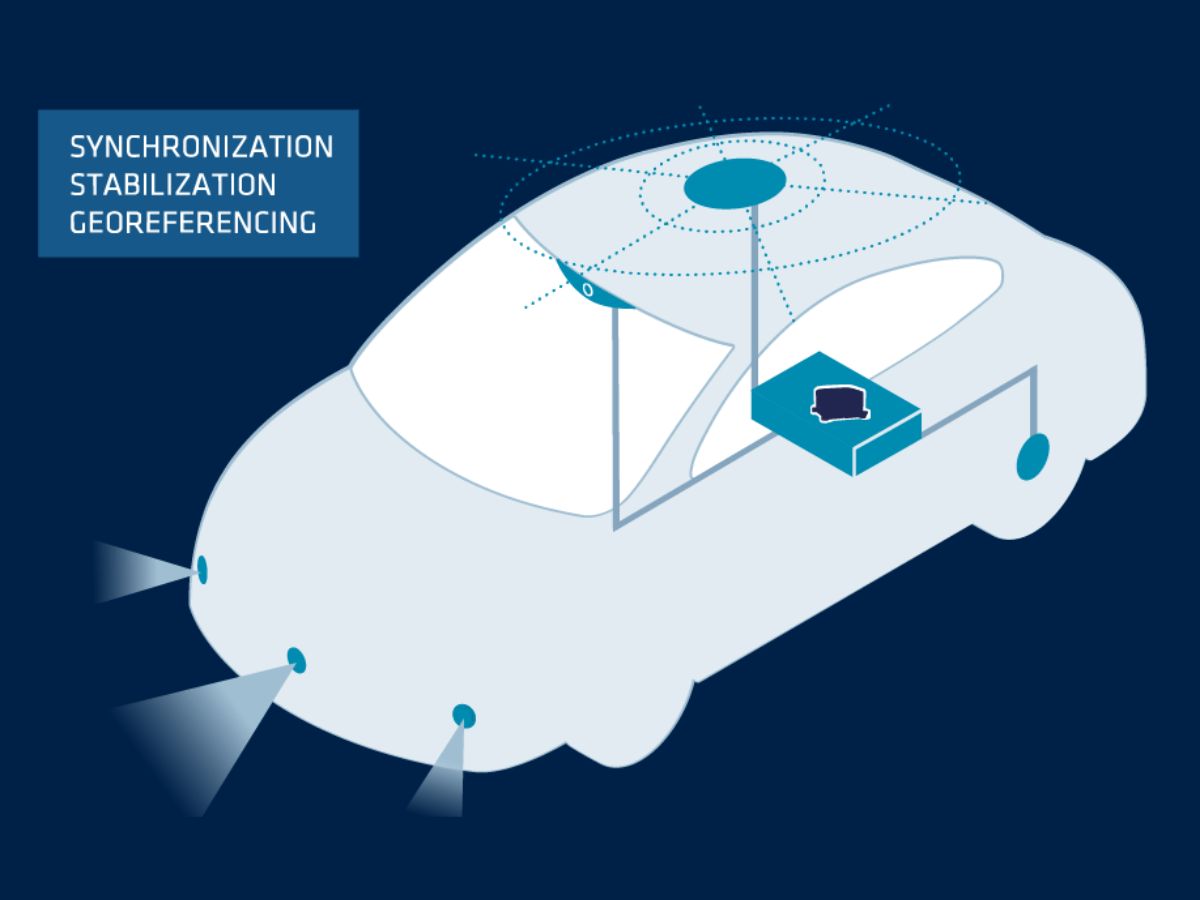
Єдиний інтерфейс зв'язку з вбудованою функцією синхронізації
Наші інерційні системи забезпечують спрощений процес інтеграції завдяки єдиному інтерфейсу зв’язку. INS слугувати центральним вузлом для даних як від датчиків GNSS від датчиків LiDAR. Використовуючи стандартні протоколи зв’язку, Ethernet або шину CAN, ви можете підключити INS вашого GNSS та мобільної системи LiDAR, мінімізуючи складність апаратного забезпечення та уникаючи необхідності використання декількох каналів зв’язку.
Наші INS мають вбудовані функції синхронізації, що забезпечують безперебійне об'єднання даних GNSS, LiDAR та інерційних даних.
INS слугувати головним годинником PTP, синхронізуючи часові мітки з усіх датчиків, що є критично важливим для роботи SLAM. Він використовує функції годинника реального часу (RTC) та здатність обробляти GNSS і зовнішні тригерні сигнали. INS правильне узгодження даних GNSS LiDAR для точної обробки SLAM.
Можливості обробки даних у реальному часі та подальшої обробки
Системи мобільного картографування (MMS) забезпечують як можливості роботи в режимі реального часу, так і можливості постобробки, що дозволяє користувачам отримувати доступ до даних миттєво, а також уточнювати результати пізніше для підвищення точності.
Збір даних у режимі реального часу дозволяє інженерам або геодезистам проводити оцінку безпосередньо на місці, тоді як програмне забезпечення для постобробки гарантує максимальну точність кінцевого результату. Інерційні системи роблять значний внесок у цей процес, забезпечуючи стабільність і надійність даних про місцезнаходження навіть у випадках, коли супутникові сигнали недоступні або їхня якість погіршена.
Мобільні картографічні платформи, оснащені інерційними системами, забезпечують гнучкість у зборі та аналізі даних. Оператори можуть налаштовувати параметри на ходу, гарантуючи, що їхні картографічні проекти відповідають необхідним стандартам точності та прецизійності.
Ми пропонуємо Qinertia — потужне програмне забезпечення для постобробки, яке вдосконалює INS GNSS INS для більшої точності траєкторії. Qinertia доповнює картографічні робочі процеси на основі SLAM, підвищуючи точність та надійність.

Ознайомтеся з нашими рішеннями для мобільної картографії
Наші інерційні навігаційні системи (INS) розроблені спеціально для ринку геодезії та топографії й відрізняються високою продуктивністю та простотою у використанні. Створені на базі сучасних інерційних датчиків, вони поєднують у собі передові алгоритми та GNSS , забезпечуючи точні дані навігації та позиціонування. Наші системи мають високу адаптивність і оснащені настроюваними компонентами, що дозволяє задовольнити конкретні потреби користувачів

Ekinox-D

Apogee-D

Navsight
Брошура про картографічні додатки
Отримайте нашу брошуру прямо на свою електронну пошту!
Приклади застосування
SBG Systems з провідними підприємствами з метою надання високоефективних інерційних рішень для мобільної картографії.
У наших прикладах з практики наведено успішні проекти, в яких наша технологія сприяла покращенню збору та аналізу даних.
Ідеальна точність та ефективність картографування за допомогою LiDAR із Quanta Micro
LiDAR картографування

Мобільне картографування на основі технології SLAM із використанням інерційної навігаційної системи RTK
Мобільне картографування



Про нас говорять
Послухайте безпосередньо від новаторів та клієнтів, які вже використовують нашу технологію.
Їхні відгуки та історії успіху свідчать про значний вплив наших датчиків на практичне застосування в автономних транспортних засобах.
Дізнайтеся більше про програми для геодезії
SBG Systems високопродуктивні інерційні навігаційні системи та датчики руху для наземної, морської та повітряної зйомки. Наші інерційні рішення дають змогу фахівцям у галузі геопросторових даних збирати точні дані про місцезнаходження, орієнтацію та рух у будь-яких умовах.
Ознайомтеся з нашими програмами для геодезії.
У вас є питання?
У розділі «Часті запитання» ви знайдете відповіді на типові запитання щодо систем мобільного картографування та технологій, на яких вони базуються. Також тут описано найкращі практики та показано, як інтегрувати наші продукти у ваші рішення.
Що означає SLAM?
SLAM (Simultaneous Localization and Mapping) — це обчислювальна технологія, що застосовується в робототехніці та комп'ютерному зорі для побудови карти невідомого середовища з одночасним відстеженням місцезнаходження агента в цьому середовищі. Це особливо корисно в ситуаціях, коли GNSS , наприклад, у приміщеннях або в густонаселених міських районах.
Системи SLAM визначають положення та орієнтацію агента в режимі реального часу. Це передбачає відстеження руху робота або пристрою під час його переміщення по навколишньому середовищу. Під час руху агента система SLAM створює карту навколишнього середовища. Це може бути двовимірне або тривимірне зображення, що відображає планування, перешкоди та особливості оточення.
Ці системи часто використовують декілька датчиків, таких як камери, LiDAR або інерційні вимірювальні блоки (IMU), для збору даних про навколишнє середовище. Ці дані об’єднуються для підвищення точності як локалізації, так і картографування.
Алгоритми SLAM обробляють вхідні дані, щоб постійно оновлювати карту та місцезнаходження агента. Це передбачає складні математичні обчислення, зокрема застосування методів фільтрації та оптимізації.
Що таке кінематика в реальному часі?
«Кінематика в реальному часі» (RTK) — це технологія точної супутникової навігації, яка використовується для підвищення точності даних про місцезнаходження, отриманих на основі вимірювань Глобальної навігаційної супутникової системи (GNSS). Вона широко застосовується в таких сферах, як геодезія, сільське господарство та навігація автономних транспортних засобів.
За допомогою базової станції, яка приймає GNSS і з високою точністю обчислює своє місцезнаходження. Потім вона в режимі реального часу передає поправні дані одному або декільком мобільним приймачам (роверам). Ровери використовують ці дані для коригування своїх GNSS , підвищуючи точність визначення свого місцезнаходження.
Технологія RTK забезпечує точність на рівні сантиметрів завдяки корекції GNSS у режимі реального часу. Це значно точніше, ніж стандартне GNSS , яке зазвичай забезпечує точність у межах декількох метрів.
Корекційні дані з базової станції передаються на пересувні станції різними способами зв’язку, такими як радіозв’язок, мережі мобільного зв’язку або Інтернет. Цей зв’язок у режимі реального часу має вирішальне значення для забезпечення точності під час динамічних операцій.
Що таке точне позиціонування?
Точне позиціонування (PPP) — це технологія супутникової навігації, яка забезпечує високу точність позиціонування завдяки корекції похибок супутникового сигналу. На відміну від традиційних GNSS , які часто базуються на наземних опорних станціях (як, наприклад, у RTK), технологія PPP використовує дані глобальної супутникової мережі та сучасні алгоритми для надання точної інформації про місцезнаходження.
Система PPP працює в будь-якій точці світу без необхідності використання місцевих опорних станцій. Це робить її придатною для застосування у віддалених або складних умовах, де відсутня наземна інфраструктура. Завдяки використанню точних даних про орбіту супутників та час, а також поправкам на атмосферні ефекти та ефекти багатопроменевого поширення, система PPP мінімізує типові GNSS і дозволяє досягти точності на рівні сантиметрів.
Хоча PPP можна використовувати для постпроцесорного позиціонування, яке передбачає аналіз зібраних даних після завершення вимірювання, ця технологія також може забезпечувати рішення для позиціонування в режимі реального часу. Послуги PPP у режимі реального часу (RTPPP) стають дедалі доступнішими, що дозволяє користувачам отримувати поправки та визначати своє місцезнаходження в режимі реального часу.
Що таке годинник реального часу?
Годинник реального часу (RTC) — це електронний пристрій, призначений для відстеження поточного часу та дати навіть у вимкненому стані. RTC широко застосовуються в системах, що вимагають точного відліку часу, і виконують кілька ключових функцій.
По-перше, вони забезпечують точний облік секунд, хвилин, годин, днів, місяців і років, часто враховуючи високосні роки та дні тижня для забезпечення довгострокової точності. РТС споживають мало енергії та можуть працювати від резервного акумулятора, що дозволяє їм продовжувати відстежувати час під час перебоїв у електропостачанні. Вони також генерують часові мітки для записів даних і журналів, забезпечуючи точність документації.
Крім того, RTC можуть запускати заплановані операції, що дозволяє системам виходити зі станів енергозбереження або виконувати завдання у визначений час. Вони відіграють ключову роль у синхронізації декількох пристроїв (наприклад, INS), забезпечуючи їхню узгоджену роботу.
Генератори реального часу (RTC) є невід'ємною частиною різноманітних пристроїв — від комп'ютерів і промислового обладнання до пристроїв Інтернету речей (IoT) — розширюючи їхні функціональні можливості та забезпечуючи надійне управління часом у різних додатках.
Як працює GPS?
GPS (Глобальна система позиціонування) використовує супутникову групу, точний хронометраж та трилатерацію для визначення вашого місцезнаходження в будь-якій точці Землі.
Ось найпростіше і зрозуміле пояснення:
1 – Супутники передають сигнали
Навколо Землі обертається близько 30 супутників GPS, кожен з яких безперервно передає:
– своє точне положення в просторі
– точний час відправлення сигналу (за допомогою атомних годинників)
Ці сигнали поширюються зі швидкістю світла.
2 – Ваш приймач вимірює час проходження сигналу
GPS-приймач (у вашому телефоні, дроні, INS тощо) приймає сигнали від декількох супутників.
Вимірюючи час, за який кожен сигнал доходить до приймача, система обчислює відстань:
відстань = швидкість світла × час проходження
3 – Трилатерація визначає ваше місцезнаходження
Щоб визначити своє місцезнаходження, приймач використовує метод трилатерації (а не триангуляції):
- Маючи 1 супутник → ви можете перебувати в будь-якій точці на земній кулі
- При наявності 2 супутників → кола перетинаються
- З 3 супутниками → дві можливі точки
- Завдяки 4 супутникам → ваше точне 3D-положення + корекція часу
Ваш приймач не має атомного годинника, тому для усунення помилок синхронізації потрібен четвертий супутник.
4 – Виправлення підвищують точність
У необроблених даних GPS містяться похибки, що виникають через:
- Атмосфера (іоносфера, тропосфера)
- Зсув супутникового годинника
- Похибки прогнозування орбіти
- Багатопроменеві відбиття (сигнали, що відбиваються від будівель)
Щоб підвищити точність:
- Система SBAS (наприклад, WAAS, EGNOS) забезпечує поправки в режимі реального часу
- Технології RTK та PPP дозволяють коригувати похибки з точністю до сантиметра
- INS (IMU GPS) згладжує коливання та заповнює прогалини під час втрати сигналу
6 – Кінцевий результат
Приймач об'єднує всі дані для розрахунку:
- Широта
- Довгота
- Висота над рівнем моря
- Швидкість
- Точний час
Сучасні GPS-приймачі роблять це десятки або сотні разів на секунду.
Що таке інерційна навігація?
Інерційна навігація — це метод визначення положення, орієнтації та руху транспортного засобу з використанням виключно внутрішніх датчиків, без опори на зовнішні сигнали, такі як GPS. В основі інерційної навігаційної системи (INS) лежить вимірювання руху об'єкта шляхом безперервного відстеження його прискорення та обертання у трьох вимірах. Вона використовує інерційний вимірювальний блок (IMU), який містить акселерометри для вимірювання лінійного прискорення та гіроскопи для вимірювання кутової швидкості. Шляхом математичної інтеграції цих вимірювань у часі система обчислює швидкість, орієнтацію та, зрештою, положення відносно відомої початкової точки.
Оскільки інерційна навігація є повністю автономною, вона працює в будь-яких умовах — під землею, під водою, у космосі або вdenied — що робить її незамінною для таких застосувань, як ракети, літаки, підводні човни, автономні транспортні засоби та робототехніка. Сучасні INS часто поєднують інерційні датчики з додатковими допоміжними джерелами, такими як GNSS , магнітометри, барометри або доплерівські датчики швидкості, щоб зменшити дрейф і підвищити довгострокову точність. Високоефективні INS базуються на точній калібруванні датчиків, передових алгоритмах фільтрації та надійному моделюванні похибок, щоб забезпечувати стабільні та надійні навігаційні дані навіть у найскладніших умовах.
