Cimiteri militari americani digitalizzati per una missione solenne
“Abbiamo scelto l'Ellipse-D per la sua soluzione GNSS e inerziale all-in-one, racchiusa in un dispositivo compatto e a basso consumo energetico.” | Matthew R. Staley, scienziato del supporto per l'ingegneria militare e il rilevamento presso l'US Army Geospatial Center
L'Army Geospatial Center (AGC) ha applicato l'innovazione per aiutare i visitatori dei cimiteri militari americani a trovare i propri cari.
I metodi di rilevamento GPS tradizionali e la digitalizzazione della mappatura 3D sono stati integrati e montati su uno zaino appositamente costruito per la fase di raccolta di questo progetto.
Un'interfaccia web che funge da front-end per i dati raccolti fornisce un'interfaccia semplice per i visitatori per trovare i propri parenti e accedere alle informazioni ampliate memorizzate nel database GIS.
Un progetto pilota per una missione solenne
Trovare una particolare lapide in un cimitero nazionale americano spesso richiede approfondite e lunghe revisioni dei registri da parte degli amministratori.
Per aiutare i visitatori a trovare facilmente i propri cari, l'Army Geospatial Center (AGC) in collaborazione con l'Arlington National Cemetery (ANC) ha completato un progetto pilota che include i cimiteri di Corozal (Panama) e Normandia (Francia) che, insieme, comprendono più di 15.000 tombe.
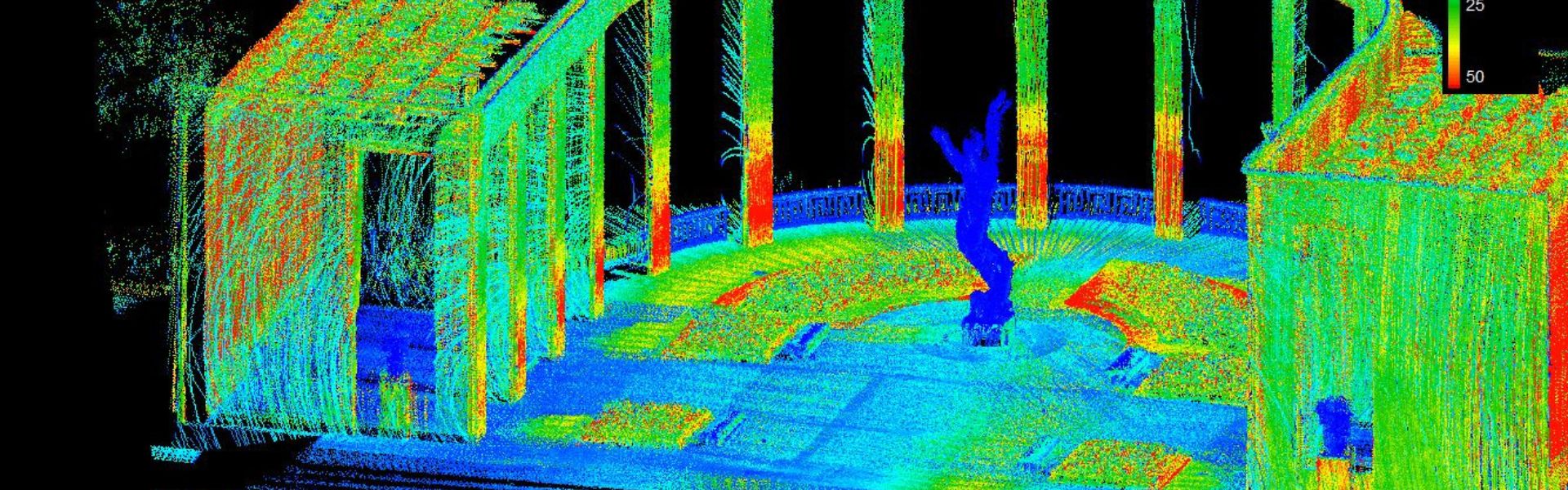
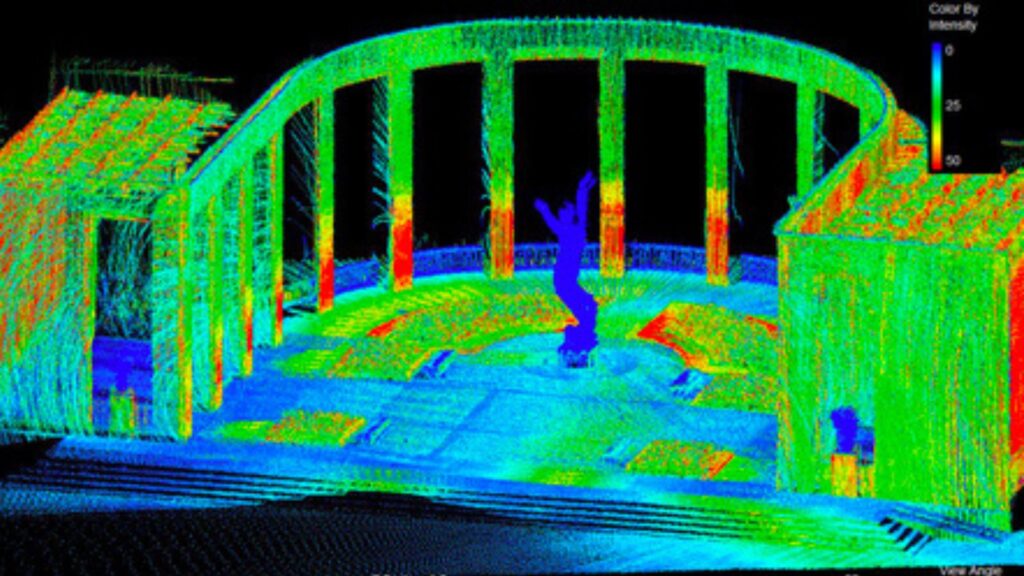
Questo imponente progetto combina metodi di rilevamento tradizionali e tecnologie moderne per creare modelli virtuali di entrambi i cimiteri.
I modelli includono non solo il terreno sottostante e le coordinate GPS per ogni lapide o monumento commemorativo, ma anche elementi come strade, marciapiedi, alberi, cordoli, grondaie, monumenti e molte altre strutture artificiali con una precisione stimata di 10 cm (3,9 pollici).
Fotografie geolocalizzate del fronte e del retro di ogni lapide per facilitarne l'identificazione hanno completato la soluzione di raccolta.
I dati raccolti sono stati elaborati e integrati sul laptop ENFIRE. Grazie a queste innovazioni, i visitatori possono accedere ai dati del cimitero, cercare i propri cari o trovare tombe di importanza storica utilizzando i chioschi presso le strutture che eseguono il programma ANC Explorer.
I visitatori virtuali hanno identiche funzionalità utilizzando il programma sul proprio computer di casa o dispositivo mobile.
Metodo di Mappatura Mobile Basato su Zaino
Per mappare i cimiteri nella loro interezza con il massimo dei dettagli, Matthew R. Staley, Scienziato del Supporto all'Ingegneria Militare e al Rilevamento presso l'US Army Geospatial Center, ha sviluppato una soluzione di mobile mapping basata su zaino.
L'impiego dell'attrezzatura riduce al minimo i costi diminuendo i tempi di raccolta e fornendo dati in formati facili da gestire. Sfrutta gli strumenti utilizzati dai Servizi di Rilevamento Militare degli Stati Uniti chiamati ENFIRE e GPS-S.
“Ho abbinato un LiDAR di Velodyne con il sistema di Navigazione Inerziale (INS) Ellipse-D con GPS RTK integrato di SBG Systems” spiega Matthew R. Staley.
Ha scelto l'Ellipse-D per la sua soluzione GNSS e Inerziale tutto in uno, racchiusa in un dispositivo compatto e a basso consumo energetico.
L'INS/GNSS fornisce la compensazione del movimento e la georeferenziazione della nuvola di punti. Inoltre, una stazione base Real Time Kinematic (RTK) è stata installata nel cimitero per la massima precisione. In aggiunta, il software Hypack ha gestito in modo efficiente la nuvola di punti generata.
Regolazione della declinazione magnetica
Una delle sfide era la calibrazione del magnetometro, influenzata dal contenuto di ferro della località. La variazione della declinazione magnetica dipende dalla posizione; pertanto, la spedizione dello zaino dagli Stati Uniti alla Francia ha modificato la declinazione magnetica.
La National Oceanographic and Atmospheric Agency (NOAA) americana aggiorna ogni 5 anni una mappa globale del campo magnetico terrestre.
Questa mappa può essere utilizzata, data una posizione e una data specifiche, per determinare la declinazione magnetica in quel luogo specifico.
SBG Systems integra questa mappa nei propri sistemi di navigazione inerziale, consentendo l'orientamento automatico verso il Nord Vero durante l'utilizzo di magnetometri.
Rilevamento intorno agli alberi
Un'altra sfida è stata il rilevamento in prossimità di alcuni tipi di alberi che influiscono notevolmente sulla ricezione satellitare. Il Sig. Staley ha modificato la procedura di raccolta dei dati per compensare questo problema e sta continuando la ricerca su modi che mitighino ulteriormente l'effetto della vegetazione sulla ricezione.
Inoltre, la riduzione della portata del LiDAR per ottenere una migliore precisione (+/- 5 cm complessivi) sarà studiata come un modo per mitigare gli artefatti di imbardata.
“Testerò presto il software di post-elaborazione Qinertia di SBG, potrebbe aiutare a mantenere una precisione robusta in tutte le condizioni” aggiunge l'ingegnere militare statunitense.
Il software Post Processing Kinematic (PPK) come Qinertia fornisce accesso alle correzioni RTK offline e migliora le prestazioni dei sistemi di navigazione inerziale post-elaborando i dati inerziali con le osservabili GNSS grezze utilizzando un calcolo chiamato Forward-Backward-Merge.
Recentemente rilasciato, il software Qinertia è stato progettato per essere intuitivo e facile da usare ed è stato caratterizzato in modo indipendente come il software di post-elaborazione più veloce sul mercato.
Quali sono i prossimi passi?
La missione principale era acquisire dati relativi alle sepolture e confermare l'applicabilità dei set di strumenti ENFIRE, GPS-S e LiDAR per l'operatività e la gestione dell'Arlington National Cemetery.
Hanno realizzato la capacità di verificare i terreni, aggiornare i registri e valutare le costruzioni utilizzando i dati LiDAR raccolti.
Inoltre, hanno sviluppato piani strategici che hanno migliorato l'efficienza nei loro processi aziendali.
Ora che la fase pilota si è conclusa, l'Army Geospatial Center sta collaborando strettamente con l'Arlington National Cemetery e l'American Battle Monuments Commission per valutare i risultati e determinare una strategia per futuri miglioramenti e innovazioni.
I risultati iniziali hanno dimostrato che i costi sono stati minimizzati rispetto agli sforzi precedenti. Inoltre, diverse comunità hanno realizzato un eccellente ritorno sull'investimento complessivo.


Ellipse-D
L'Ellipse-D è un sistema di navigazione inerziale che integra una doppia antenna e un GNSS RTK a doppia frequenza compatibile con il nostro software di post-elaborazione Qinertia.
Progettato per applicazioni robotiche e geospaziali, può fondere l'input dell'odometro con Pulse o CAN OBDII per una maggiore accuratezza della navigazione stimata.

Richiedi un preventivo per Ellipse-D
Ha delle domande?
Benvenuti nella nostra sezione FAQ! Qui troverete le risposte alle domande più comuni sulle applicazioni che presentiamo. Se non trovate quello che state cercando, non esitate a contattarci direttamente!
L'INS accetta input da sensori di ausilio esterni?
I sistemi di navigazione inerziale della nostra azienda accettano input da sensori di ausilio esterni, come sensori di dati aerei, magnetometri, odometri, DVL e altri.
Questa integrazione rende l'INS altamente versatile e affidabile, specialmente in ambienti privi di GNSS.
Questi sensori esterni migliorano le prestazioni complessive e la precisione dell'INS fornendo dati complementari.
Qual è la differenza tra AHRS e INS?
La principale differenza tra un Attitude and Heading Reference System (AHRS) e un Inertial Navigation System (INS) risiede nella loro funzionalità e nella portata dei dati che forniscono.
AHRS fornisce informazioni sull'orientamento, in particolare, l'assetto (beccheggio, rollio) e l'heading (imbardata) di un veicolo o dispositivo. In genere utilizza una combinazione di sensori, tra cui giroscopi, accelerometri e magnetometri, per calcolare e stabilizzare l'orientamento. L'AHRS restituisce la posizione angolare su tre assi (beccheggio, rollio e imbardata), consentendo a un sistema di comprendere il proprio orientamento nello spazio. Viene spesso utilizzato in aviazione, UAV, robotica e sistemi marini per fornire dati accurati di assetto e heading, fondamentali per il controllo e la stabilizzazione del veicolo.
Un INS non solo fornisce dati di orientamento (come un AHRS) ma traccia anche la posizione, la velocità e l'accelerazione di un veicolo nel tempo. Utilizza sensori inerziali per stimare il movimento nello spazio 3D senza fare affidamento su riferimenti esterni come il GNSS. Combina i sensori presenti negli AHRS (giroscopi, accelerometri) ma può anche includere algoritmi più avanzati per il tracciamento di posizione e velocità, spesso integrandosi con dati esterni come il GNSS per una maggiore precisione.
In sintesi, l'AHRS si concentra sull'orientamento (assetto e prua), mentre l'INS fornisce una suite completa di dati di navigazione, inclusi posizione, velocità e orientamento.
Qual è la differenza tra IMU e INS?
La differenza tra un'unità di misura inerziale (IMU) e un sistema di navigazione inerziale (INS) risiede nella loro funzionalità e complessità.
IMU unità di misura inerziale) fornisce dati grezzi sull'accelerazione lineare e sulla velocità angolare del veicolo, misurati da accelerometri e giroscopi. Fornisce informazioni su rollio, beccheggio, imbardata e movimento, ma non calcola la posizione né i dati di navigazione. IMU progettata specificamente per trasmettere dati essenziali sul movimento e sull'orientamento affinché vengano elaborati esternamente per determinare la posizione o la velocità.
D'altra parte, un INS sistema di navigazione inerziale) combina IMU con algoritmi avanzati per calcolare la posizione, la velocità e l'orientamento di un veicolo nel tempo. Incorpora algoritmi di navigazione come il filtro di Kalman per la fusione e l'integrazione dei sensori. Un INS dati di navigazione in tempo reale, tra cui posizione, velocità e orientamento, senza fare affidamento su sistemi di posizionamento esterni come GNSS.
Questo sistema di navigazione viene tipicamente utilizzato in applicazioni che richiedono soluzioni di navigazione complete, in particolare in ambienti GNSS, come UAV militari, navi e sottomarini.
Cos'è GNSS rispetto a GPS?
GNSS sta per Global Navigation Satellite System e GPS per Global Positioning System. Questi termini sono spesso usati in modo intercambiabile, ma si riferiscono a concetti diversi all'interno dei sistemi di navigazione satellitare.
GNSS è un termine collettivo per tutti i sistemi di navigazione satellitare, mentre il GPS si riferisce specificamente al sistema statunitense. Include diversi sistemi che forniscono una copertura globale più completa, mentre il GPS è solo uno di questi sistemi.
Si ottiene una maggiore accuratezza e affidabilità con GNSS, integrando i dati provenienti da più sistemi, mentre il solo GPS potrebbe avere delle limitazioni a seconda della disponibilità dei satelliti e delle condizioni ambientali.
