低ダイナミクス下でのより高い性能
IMUを統合したモバイルマッピングシステムは、リアルタイムデータを提供し、環境のダイナミクスに関する重要な洞察を提供します。
これらのシステムにより、自動運転車用の高解像度マップ(HDマップ)を作成し、精度を高め、データギャップのリスクを軽減できるため、インフラストラクチャマッピング、道路調査、環境分析などの用途に不可欠です。
高度なGNSSと慣性統合により、モバイルマッピングシステムは迅速なセットアップと初期化を提供し、ダウンタイムを最小限に抑え、迅速なデータ収集を可能にします。これは、インフラストラクチャのモバイル調査や緊急対応マッピングなど、迅速な展開が重要な時間的制約のあるシナリオで特に役立ちます。
都市部または屋内をゆっくりと移動する車両など、低ダイナミック環境では、高性能慣性システムが正確な位置と方向データを維持します。従来のGPSシステムはこのような状況では苦労する可能性がありますが、GNSSと統合されたINSは、GNSSが利用できない環境でも、継続的で信頼性の高いデータを保証します。
これらのシステムは、一貫したパフォーマンスを保証し、あらゆる環境で正確な3Dモデル、地形図、および地理空間製品を提供します。移動速度や環境の複雑さに関係なく、精度を維持します。

組み込み同期機能を備えたシングル通信インターフェース
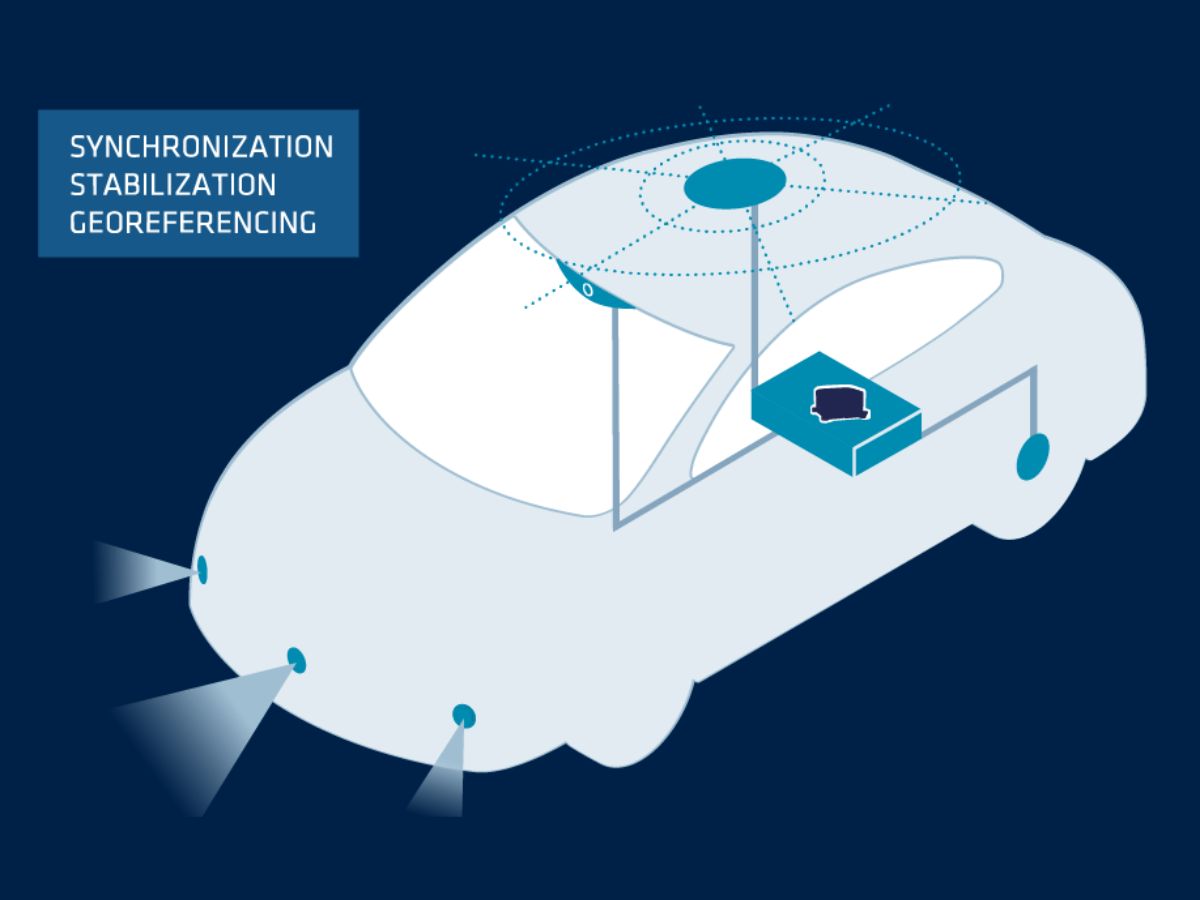
当社の慣性システムは、単一の通信インターフェースによる合理化された統合プロセスをサポートします。INSは、GNSSとLiDARセンサーの両方からのデータの中央ハブとして機能できます。業界標準の通信プロトコル、イーサネット、またはCANバスを使用することにより、GNSS受信機およびモバイルLiDARシステムとINSをインターフェース接続し、ハードウェアの複雑さを最小限に抑え、複数の通信リンクの必要性を回避できます。
当社のINSソリューションには、GNSS、LiDAR、および慣性データ間のシームレスなデータ融合を保証する組み込みの同期機能が付属しています。
INSは、PTPマスタークロックとして機能し、すべてのセンサーからのタイムスタンプを同期します。これは、SLAM操作に不可欠です。リアルタイムクロック(RTC)機能と、GNSSタイミングおよび外部トリガー信号を処理する機能を備えています。INSは、正確なSLAM処理のためにGNSSおよびLiDARデータが適切に調整されるようにします。
リアルタイムおよび後処理機能
モバイルマッピングシステム(MMS)は、リアルタイムおよび後処理機能を提供し、ユーザーは即時データにアクセスできると同時に、後で結果を改良して精度を高めることができます。
リアルタイムデータ取得により、エンジニアまたは測量技師はその場で評価を行うことができ、後処理ソフトウェアは、最終的な出力が可能な限り正確であることを保証します。慣性システムは、衛星信号が利用できない、または劣化している場合でも、一貫性のある信頼性の高い位置データを維持することにより、このプロセスに大きく貢献します。
慣性システムを搭載したモバイルマッピングプラットフォームは、データ収集と分析に柔軟性をもたらします。オペレーターは、パラメーターをその場で調整して、マッピングプロジェクトが必要な精度と精度の基準を満たすようにすることができます。
より高い軌道精度を実現するために、GNSSとINSデータを改良する強力な後処理ソフトウェアであるQinertiaを提供しています。Qinertiaは、精度と信頼性を高めることにより、SLAMベースのマッピングワークフローを補完します。

モバイルマッピングのためのSBG Systemsのソリューションをご覧ください
当社の慣性航法システム(INS)は、測量市場向けに特別に設計されており、高性能と使いやすさを提供します。高度な慣性センサーをベースに、最先端のアルゴリズムとGNSS技術を統合し、正確なナビゲーションおよび位置データを提供します。当社のシステムは適応性が高く、特定のアプリケーションニーズに合わせて構成可能なコンポーネントを備えています。

Ekinox-D

Apogee-D

Navsight Land-Air
マッピングアプリケーションのパンフレット
パンフレットを直接受信箱に届けます。
事例紹介
SBG Systemsは、主要企業と提携して、モバイルマッピング用の高性能慣性ソリューションを提供しています。
SBG Systemsのケーススタディでは、当社のテクノロジーがデータ取得と分析を強化した成功したプロジェクトを紹介しています。






SBG Systemsについて
SBG Systemsの技術を採用したイノベーターやクライアントからの直接の声をお聞きください。
当社のセンサーが、実際の自律走行車アプリケーションに大きな影響を与えていることは、お客様の声や成功事例が物語っています。
その他の測量アプリケーションを見る
SBG Systemsは、陸、海、および航空測量用の高性能慣性航法システムおよびモーションセンサーを提供しています。当社の慣性ソリューションにより、地理空間の専門家は、あらゆる環境で正確な位置、姿勢、およびモーションデータを収集できます。
SBG Systemsの測量アプリケーションをご覧ください。
ご質問はありますか?
SBG SystemsのFAQセクションでは、モバイルマッピングシステムとその背後にあるテクノロジーに関する一般的な質問に回答しています。また、ベストプラクティスについて説明し、SBG Systemsの製品をお客様のソリューションに統合する方法を示します。
SLAMとはどういう意味ですか?
SLAM(Simultaneous Localization and Mapping)とは、ロボット工学やコンピュータビジョンで使用される計算技術で、未知の環境の地図を作成しながら、その環境内でのエージェントの位置を追跡します。これは、屋内や密集した都市部など、GNSSが利用できないシナリオで特に役立ちます。
SLAMシステムは、エージェントの位置と姿勢をリアルタイムで特定します。これには、ロボットやデバイスが環境内を移動する際の動きを追跡することが含まれます。エージェントが移動する間、SLAMシステムは環境のマップを作成します。これは、周囲のレイアウト、障害物、特徴を捉えた2Dまたは3Dの表現となり得ます。
これらのシステムは、多くの場合、カメラ、LiDAR、慣性計測ユニット(IMU)などの複数のセンサーを利用して、環境に関するデータを収集します。このデータを組み合わせることで、ローカリゼーションとマッピングの両方の精度が向上します。
SLAMアルゴリズムは、入力データを処理して、地図とエージェントの位置を継続的に更新します。これには、フィルタリングや最適化技術を含む、複雑な数学的計算が含まれます。
Real Time Kinematicとは?
リアルタイムキネマティック(RTK)は、全地球航法衛星システム(GNSS)の測定から得られた位置データの精度を高めるために使用される、精密な衛星航法技術です。測量、農業、自律走行車のナビゲーションなどのアプリケーションで広く使用されています。
GNSS 信号を受信し、その位置を高精度で計算する基地局を使用します。次に、補正データを 1 つまたは複数の移動受信機(ローバー)にリアルタイムで送信します。ローバーはこのデータを使用して GNSS の読み取り値を調整し、位置精度を高めます。
RTK は、GNSS 信号をリアルタイムで補正することにより、センチメートルレベルの精度を提供します。これは、通常数メートル以内の精度を提供する標準的な GNSS 測位よりも大幅に正確です。
基地局からの補正データは、無線、セルラーネットワーク、インターネットなど、さまざまな通信方法を介してローバーに送信されます。このリアルタイム通信は、動的な作業中の精度を維持するために非常に重要です。
Precise Point Positioningとは?
Precise Point Positioning(PPP)は、衛星信号誤差を修正することにより、高精度測位を提供する衛星ナビゲーション技術です。従来のGNSS方式(RTKなど)とは異なり、PPPはグローバル衛星データと高度なアルゴリズムを利用して、正確な位置情報を提供します。
PPPは、ローカルリファレンスステーションを必要とせずに、世界のどこでも機能します。これにより、地上インフラストラクチャが不足している遠隔地や困難な環境でのアプリケーションに適しています。正確な衛星軌道およびクロックデータを使用し、大気およびマルチパス効果の補正とともに、PPPは一般的なGNSS誤差を最小限に抑え、センチメートルレベルの精度を達成できます。
PPPは、収集したデータを事後に分析する後処理測位に利用できる一方で、リアルタイム測位ソリューションも提供可能です。リアルタイムPPP(RTPPP)は利用が拡大しており、ユーザーはリアルタイムで補正を受信し、自己位置を決定できます。
リアルタイムクロックとは何ですか?
リアルタイムクロック(RTC)は、電源がオフの場合でも現在の日時を追跡するように設計された電子デバイスです。正確な計時を必要とするアプリケーションで広く利用されており、RTCはいくつかの重要な機能を果たします。
まず、RTCは秒、分、時、日、月、年を正確にカウントし、長期的な精度を確保するために閏年や曜日計算を組み込むことがよくあります。RTCは低消費電力で動作し、バッテリーバックアップで稼働できるため、停電時でも時刻を維持し続けることが可能です。また、データ入力やログにタイムスタンプを提供し、正確な記録を保証します。
さらに、RTCはスケジュールされた操作をトリガーできるため、システムは低電力状態から復帰したり、指定された時間にタスクを実行したりできます。これらは、複数のデバイス(例:GNSS/INS)を同期させ、それらが連携して動作するようにする上で重要な役割を果たします。
RTCは、コンピュータや産業機器からIoTデバイスまで、さまざまなデバイスに不可欠であり、機能性を高め、複数のアプリケーションにわたって信頼性の高い時間管理を保証します。
GPSの仕組み
GPS(全地球測位システム)は、衛星群、精密なタイミング、および三辺測量を利用して、地球上のどこでも位置を特定します。
最もわかりやすい説明は以下のとおりです:
1 – 衛星が信号を送信
約30個のGPS衛星が地球を周回しており、それぞれが以下の情報を継続的に送信しています:
– 宇宙空間における正確な位置
– 信号が送信された正確な時刻(原子時計を使用)
これらの信号は光の速度で伝わります。
2 – 受信機が伝搬時間を計測
GPS受信機(携帯電話、ドローン、INSなど)は、複数の衛星からの信号を受信します。
各信号の到達にかかった時間を測定することで、距離を計算します。
距離 = 光速 × 伝播時間
3 – 三辺測量で位置を計算
受信機が自分の位置を特定するために、三辺測量(三角測量ではない)を使用します。
- 1 つの衛星を使用 → 球体のどこにでもいる可能性があります
- 2 つの衛星を使用 → 円が交差する
- 3 つの衛星を使用 → 2 つの可能な点
- 4 つの衛星を使用 → 正確な 3D 位置 + 時計補正
受信機には原子時計が搭載されていないため、4つ目の衛星を使用してタイミング誤差を解決する必要があります。
4 – 補正により精度が向上
生のGPSには次の誤差があります:
- 大気 (電離層、対流圏)
- 衛星のクロックドリフト
- 軌道予測誤差
- マルチパス反射(建物から反射する信号)
精度を向上させるには:
- SBAS(例:WAAS、EGNOS)はリアルタイム補正を提供します。
- RTKおよびPPP技術は、誤差をセンチメートルレベルまで補正します。
- INS coupling (IMU + GPS) は、信号損失中のギャップを平滑化し、補完します。
6 – 最終出力
受信機はすべてのデータを組み合わせて以下を推定します。
- 緯度
- 経度
- 高度
- 速度
- 正確な時間
最新のGPS受信機は、これを1秒間に数十回から数百回行います。
慣性航法とは?
慣性航法とは、GPSのような外部信号に依存せず、内部センサーのみを用いて車両の位置、姿勢、運動を決定する手法です。その中核をなす慣性航法システム (INS) は、物体の3次元における加速度と回転を継続的に追跡することで、その動きを測定します。IMU(慣性計測ユニット)を使用しており、これには線形加速度を検出する加速度計と、角速度を測定するジャイロスコープが含まれています。これらの測定値を時間積分することで、システムは速度、姿勢、そして最終的には既知の出発点を基準とした位置を算出します。
完全に自己完結型であるため、慣性航法は、地下、水中、宇宙空間、またはGPSが利用できない環境など、あらゆる環境で機能します。これにより、ミサイル、航空機、潜水艦、自律走行車、ロボット工学などの用途に不可欠なものとなっています。現代のINSソリューションは、ドリフトを低減し、長期的な精度を向上させるために、慣性センサーとGNSS受信機、磁力計、気圧計、またはドップラー速度ログなどの追加の補助情報源を組み合わせることがよくあります。高性能INSは、最も要求の厳しい環境においても、安定した信頼性の高い航法データを提供するために、精密なセンサー校正、高度なフィルタリングアルゴリズム、および堅牢な誤差モデリングに依存しています。
