Wyższa wydajność przy niskiej dynamice
Mobilne systemy mapowania ze zintegrowanymi jednostkami IMU dostarczają dane w czasie rzeczywistym, zapewniając krytyczny wgląd w dynamikę środowiska.
Systemy te umożliwiają tworzenie map o wysokiej rozdzielczości (map HD) dla pojazdów autonomicznych, zwiększają dokładność i zmniejszają ryzyko luk w danych, co czyni je niezbędnymi w zastosowaniach takich jak mapowanie infrastruktury, badania drogowe i analiza środowiska.
Dzięki zaawansowanej integracji GNSS i inercyjnej, mobilne systemy mapowania oferują szybką konfigurację i szybką inicjalizację, minimalizując przestoje i umożliwiając szybkie gromadzenie danych. Jest to szczególnie cenne w scenariuszach, w których liczy się czas, takich jak mobilne badania infrastruktury lub mapowanie w sytuacjach awaryjnych, gdzie szybkie wdrożenie ma kluczowe znaczenie.
W środowiskach o niskiej dynamice, takich jak pojazdy poruszające się powoli po obszarach miejskich lub w pomieszczeniach, wysokowydajne systemy inercyjne utrzymują precyzyjne dane pozycjonowania i orientacji. Podczas gdy tradycyjne systemy GPS mogą mieć trudności w takich warunkach, INS zintegrowany z GNSS zapewnia ciągłe, wiarygodne dane, nawet w środowiskach ograniczenia GNSS.
Systemy te zapewniają stałą wydajność i dostarczają dokładne modele 3D, mapy topograficzne i produkty geoprzestrzenne w każdym środowisku. Zachowują dokładność niezależnie od prędkości ruchu lub złożoności środowiska.

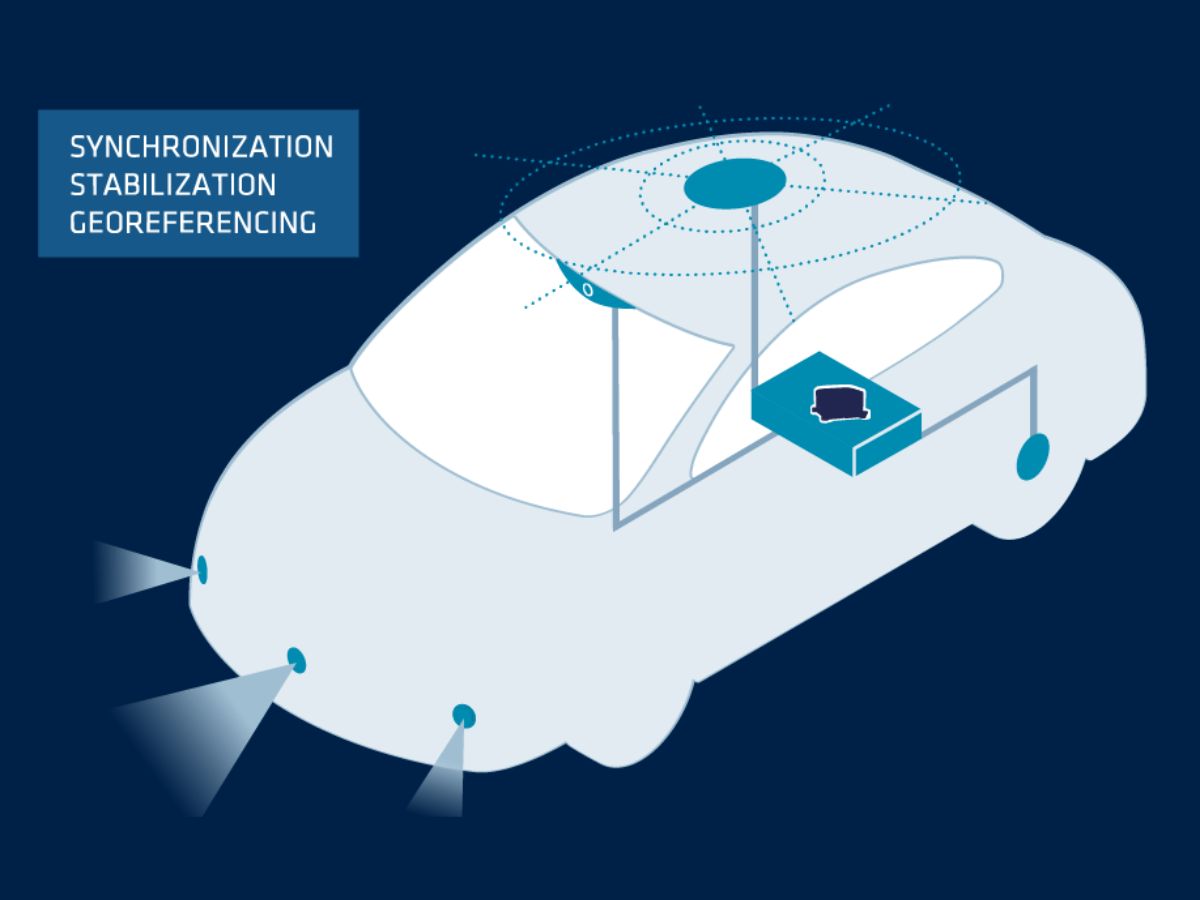
Pojedynczy interfejs komunikacyjny z wbudowaną synchronizacją
Nasze systemy inercyjne obsługują usprawniony proces integracji za pomocą jednego interfejsu komunikacyjnego. INS może służyć jako centralny węzeł danych zarówno z czujników GNSS, jak i LiDAR. Korzystając ze standardowych protokołów komunikacyjnych, Ethernet lub magistrali CAN, można połączyć INS z odbiornikiem GNSS i mobilnym systemem LiDAR, minimalizując złożoność sprzętu i unikając potrzeby stosowania wielu łączy komunikacyjnych.
Nasze rozwiązania INS są wyposażone we wbudowane funkcje synchronizacji, które zapewniają bezproblemową fuzję danych między GNSS, LiDAR i danymi inercyjnymi.
INS może służyć jako zegar główny PTP, synchronizując znaczniki czasu ze wszystkich czujników, co jest krytyczne dla operacji SLAM. Wykorzystuje funkcje zegara czasu rzeczywistego (RTC) i możliwość obsługi sygnałów czasowych GNSS i zewnętrznych sygnałów wyzwalających. INS zapewni prawidłowe wyrównanie danych GNSS i LiDAR w celu dokładnego przetwarzania SLAM.
Możliwości pracy w czasie rzeczywistym i postprocessingu
Mobilne systemy mapowania (MMS) zapewniają możliwości post-processing w czasie rzeczywistym, jak i po zakończeniu akwizycji, umożliwiając użytkownikom natychmiastowy dostęp do danych, a jednocześnie późniejsze doprecyzowanie wyników w celu zwiększenia dokładności.
Pozyskiwanie danych w czasie rzeczywistym umożliwia inżynierom i specjalistom pomiarowym dokonywanie ocen na miejscu, natomiast oprogramowanie do post-processingu zapewnia, że końcowe wyniki są tak dokładne, jak to tylko możliwe. Systemy inercyjne w znaczący sposób przyczyniają się do tego procesu, utrzymując spójne i niezawodne dane pozycyjne, nawet gdy sygnały satelitarne są niedostępne lub zakłócone.
Mobilne platformy mapujące wyposażone w systemy inercyjne oferują elastyczność w zakresie gromadzenia i analizy danych. Operatorzy mogą na bieżąco dostosowywać parametry, zapewniając, że ich projekty mapowania spełniają wymagane standardy dokładności i precyzji.
Oferujemy Qinertia, zaawansowane oprogramowanie do post-processingu, które poprawia dane GNSS i INS, zapewniając większą dokładność trajektorii. Qinertia uzupełnia przepływy pracy mapowania oparte na SLAM, zwiększając precyzję i niezawodność.

Odkryj nasze rozwiązania dla mobilnego mapowania
Nasze inercyjne systemy nawigacyjne (INS) są zaprojektowane specjalnie dla rynków pomiarowych, oferując wysoką wydajność i łatwość użytkowania. Zbudowane na zaawansowanych czujnikach inercyjnych, integrują najnowocześniejsze algorytmy i technologię GNSS, aby dostarczać precyzyjne dane nawigacyjne i pozycjonujące. Nasze systemy są wysoce adaptowalne, z konfigurowalnymi komponentami, aby spełnić specyficzne potrzeby aplikacji.

Ekinox-D

Apogee-D

Navsight Land-Air
Broszura o zastosowaniach mapowania
Otrzymaj naszą broszurę prosto na swoją skrzynkę odbiorczą!
Studia przypadków
SBG Systems współpracuje z wiodącymi firmami, dostarczając wysokowydajne rozwiązania inercyjne do mobilnego mapowania.
Nasze studia przypadków podkreślają udane projekty, w których nasza technologia poprawiła akwizycję i analizę danych.






Oni o nas mówią
Posłuchaj z pierwszej ręki innowatorów i klientów, którzy wdrożyli naszą technologię.
Ich referencje i historie sukcesu ilustrują znaczący wpływ, jaki nasze czujniki mają w praktycznych zastosowaniach w pojazdach autonomicznych.
Odkryj więcej zastosowań w geodezji
SBG Systems dostarcza wysokowydajne inercyjne systemy nawigacyjne i czujniki ruchu do zastosowań lądowych, morskich i powietrznych. Nasze rozwiązania inercyjne umożliwiają specjalistom z dziedziny geodezji precyzyjny pomiar pozycji, orientacji i ruchu w każdym środowisku.
Zapoznaj się z naszymi aplikacjami geodezyjnymi.
Masz pytania?
W sekcji FAQ znajdziesz odpowiedzi na często zadawane pytania dotyczące systemów mobilnego mapowania i technologii, które za nimi stoją. Wyjaśniono w niej również najlepsze praktyki i pokazano, jak zintegrować nasze produkty z Twoimi rozwiązaniami.
Co oznacza SLAM?
SLAM, czyli Simultaneous Localization and Mapping (jednoczesna lokalizacja i mapowanie), to technika obliczeniowa stosowana w robotyce i wizji komputerowej do tworzenia mapy nieznanego otoczenia przy jednoczesnym śledzeniu położenia obiektu w tym otoczeniu. Jest to szczególnie przydatne w scenariuszach, w których system GNSS jest niedostępny, na przykład w pomieszczeniach zamkniętych lub na obszarach o gęstej zabudowie miejskiej.
Systemy SLAM określają pozycję i orientację agenta w czasie rzeczywistym. Polega to na śledzeniu ruchu robota lub urządzenia podczas nawigacji w środowisku. Gdy agent się porusza, system SLAM tworzy mapę środowiska. Może to być reprezentacja 2D lub 3D, odwzorowująca układ, przeszkody i cechy otoczenia.
Systemy te często wykorzystują wiele czujników, takich jak kamery, LiDAR lub inercyjne jednostki pomiarowe (IMU), do zbierania danych o otoczeniu. Dane te są łączone w celu poprawy dokładności zarówno lokalizacji, jak i mapowania.
Algorytmy SLAM przetwarzają napływające dane w celu ciągłego aktualizowania mapy i położenia obiektu. Obejmuje to złożone obliczenia matematyczne, w tym techniki filtrowania i optymalizacji.
Co to jest Real Time Kinematic?
Real-Time Kinematic (RTK) to precyzyjna technika nawigacji satelitarnej, stosowana w celu zwiększenia dokładności danych pozycyjnych uzyskanych z pomiarów Globalnego Systemu Nawigacji Satelitarnej (GNSS). Jest szeroko stosowana w takich zastosowaniach, jak geodezja, rolnictwo i nawigacja pojazdów autonomicznych.
Wykorzystuje stację bazową, która odbiera sygnały GNSS i oblicza swoje położenie z dużą dokładnością. Następnie przesyła dane korekcyjne do jednego lub większej liczby odbiorników ruchomych (roverów) w czasie rzeczywistym. Rovery wykorzystują te dane do korygowania odczytów GNSS, zwiększając dokładność pozycjonowania.
RTK zapewnia dokładność na poziomie centymetrów dzięki korygowaniu sygnałów GNSS w czasie rzeczywistym. Jest to znacznie bardziej precyzyjne niż standardowe pozycjonowanie GNSS, które zazwyczaj oferuje dokładność w granicach kilku metrów.
Dane korekcyjne ze stacji bazowej są przesyłane do roverów za pośrednictwem różnych metod komunikacji, takich jak radio, sieci komórkowe lub Internet. Ta komunikacja w czasie rzeczywistym ma kluczowe znaczenie dla utrzymania dokładności podczas dynamicznych operacji.
Co to jest Precise Point Positioning?
Precise Point Positioning (PPP) to technika nawigacji satelitarnej, która oferuje bardzo precyzyjne pozycjonowanie dzięki korygowaniu błędów sygnału satelitarnego. W przeciwieństwie do tradycyjnych metod GNSS, które często opierają się na naziemnych stacjach referencyjnych (jak w RTK), PPP wykorzystuje globalne dane satelitarne i zaawansowane algorytmy, aby zapewnić dokładne informacje o położeniu.
PPP działa w dowolnym miejscu na świecie bez potrzeby korzystania z lokalnych stacji referencyjnych. Dzięki temu nadaje się do zastosowań w odległych lub wymagających środowiskach, gdzie brakuje infrastruktury naziemnej. Wykorzystując precyzyjne dane dotyczące orbity i zegara satelity, wraz z poprawkami dotyczącymi wpływu atmosfery i odbioru wielodrożnego, PPP minimalizuje typowe błędy GNSS i może osiągnąć dokładność na poziomie centymetrów.
Podczas gdy PPP może być wykorzystywane do pozycjonowania po przetworzeniu, które polega na analizie zebranych danych po fakcie, może również dostarczać rozwiązania do pozycjonowania w czasie rzeczywistym. PPP w czasie rzeczywistym (RTPPP) jest coraz szerzej dostępne, umożliwiając użytkownikom otrzymywanie poprawek i określanie swojej pozycji w czasie rzeczywistym.
Co to jest zegar czasu rzeczywistego?
Zegar czasu rzeczywistego (RTC) to urządzenie elektroniczne zaprojektowane do śledzenia bieżącego czasu i daty, nawet gdy jest wyłączone. Powszechnie stosowane w aplikacjach wymagających precyzyjnego pomiaru czasu, RTC pełnią kilka kluczowych funkcji.
Po pierwsze, precyzyjnie odliczają sekundy, minuty, godziny, dni, miesiące i lata, często uwzględniając obliczenia lat przestępnych i dni tygodnia dla długoterminowej precyzji. RTC działają przy niskim poborze mocy i mogą być zasilane z baterii podtrzymującej, co pozwala im na dalsze odmierzanie czasu podczas przerw w zasilaniu. Zapewniają również znaczniki czasu dla wpisów danych i logów, co gwarantuje dokładną dokumentację.
Dodatkowo, RTC mogą wyzwalać zaplanowane operacje, umożliwiając systemom wybudzanie się ze stanów niskiego poboru mocy lub wykonywanie zadań o określonych godzinach. Odgrywają kluczową rolę w synchronizacji wielu urządzeń (np. GNSS/INS), zapewniając ich spójne działanie.
Układy RTC są integralną częścią różnych urządzeń, od komputerów i sprzętu przemysłowego po urządzenia IoT, zwiększając funkcjonalność i zapewniając niezawodne zarządzanie czasem w wielu zastosowaniach.
Jak działa GPS?
GPS (Global Positioning System) funkcjonuje, wykorzystując konstelację satelitów, precyzyjne taktowanie oraz trilaterację do wyznaczania pozycji w dowolnym miejscu na Ziemi.
Oto najprostsze, jasne wyjaśnienie:
1 – Sygnały nadawane przez satelity
Około 30 satelitów GPS krąży wokół Ziemi, każdy z nich nieustannie transmituje:
– Swoją dokładną pozycję w przestrzeni
– Dokładny czas wysłania sygnału (przy użyciu zegarów atomowych)
Sygnały te przemieszczają się z prędkością światła.
2 – Twój odbiornik mierzy czas przesyłu
Odbiornik GPS (w telefonie, dronie, INS itp.) odbiera sygnały z wielu satelitów.
Mierząc czas dotarcia każdego sygnału, oblicza odległość:
odległość = prędkość światła × czas podróży
3 – Trilateracja oblicza Twoją lokalizację
Aby znaleźć swoją pozycję, odbiornik wykorzystuje trilaterację (nie triangulację):
- Przy 1 satelicie → możesz być w dowolnym miejscu na sferze
- Przy 2 satelitach → okręgi się przecinają
- Przy 3 satelitach → dwa możliwe punkty
- Przy 4 satelitach → Twoja dokładna pozycja 3D + korekta zegara
Twój odbiornik nie posiada zegara atomowego, dlatego czwarty satelita jest potrzebny do rozwiązania problemów z synchronizacją czasu.
4 – Korekcje poprawiają dokładność
Surowe dane GPS zawierają błędy pochodzące z:
- Atmosfera (jonosfera, troposfera)
- Dryf zegara satelitarnego
- Błędy w przewidywaniu orbity
- Odbicia wielotorowe (sygnały odbijające się od budynków)
Aby poprawić dokładność:
- SBAS (np. WAAS, EGNOS) zapewnia korekcje w czasie rzeczywistym
- Techniki RTK i PPP korygują błędy do poziomu centymetra
- Sprzężenie INS (IMU + GPS) wygładza i wypełnia luki podczas utraty sygnału
6 – Wynik końcowy
Odbiornik łączy wszystkie dane w celu oszacowania:
- Szerokość geograficzna
- Długość geograficzna
- Wysokość
- Prędkość
- Precyzyjny czas
Nowoczesne odbiorniki GPS robią to dziesiątki lub setki razy na sekundę.
Czym jest nawigacja inercyjna?
Nawigacja inercyjna to metoda określania pozycji, orientacji i ruchu pojazdu wyłącznie za pomocą czujników wewnętrznych, bez polegania na sygnałach zewnętrznych, takich jak GPS. Zasadniczo, system nawigacji inercyjnej (INS) mierzy ruch obiektu poprzez ciągłe śledzenie jego przyspieszenia i rotacji w trzech wymiarach. Wykorzystuje jednostkę pomiaru inercyjnego (IMU), która zawiera akcelerometry do wykrywania przyspieszenia liniowego oraz żyroskopy do pomiaru prędkości kątowej. Poprzez matematyczne całkowanie tych pomiarów w czasie, system oblicza prędkość, orientację i ostatecznie pozycję względem znanego punktu początkowego.
Ponieważ jest całkowicie autonomiczna, nawigacja inercyjna działa w każdym środowisku — pod ziemią, pod wodą, w przestrzeni kosmicznej lub w warunkach braku sygnału GPS — co czyni ją niezbędną w zastosowaniach takich jak pociski, samoloty, łodzie podwodne, pojazdy autonomiczne i robotyka. Nowoczesne rozwiązania INS często łączą czujniki inercyjne z dodatkowymi źródłami wspomagającymi, takimi jak odbiorniki GNSS, magnetometry, barometry lub logi prędkości Dopplera, aby redukować dryf i poprawiać długoterminową dokładność. Wysokowydajne systemy INS opierają się na precyzyjnej kalibracji czujników, zaawansowanych algorytmach filtrowania i solidnym modelowaniu błędów, aby dostarczać stabilne, niezawodne dane nawigacyjne nawet w najbardziej wymagających środowiskach.
