Mobile Mapping basato su SLAM
Il vMS3D è un sistema di mobile mapping che combina il meglio delle tecnologie inerziali, GNSS e SLAM.
“Ellipse INS fornisce dati di velocità molto, molto precisi.” | Sig. Ninot, Fondatore di VIAMETRIS

VIAMETRIS è un precursore nello sviluppo di soluzioni basate su SLAM. Due anni fa, l'azienda ha rilasciato l'iMS3D, un sistema di mappatura per interni basato sulla tecnologia SLAM.
Capitalizzando questa esperienza, l'azienda ha appena lanciato una nuova soluzione: il vMS3D, un sistema di mobile mapping che combina il meglio delle tecnologie inerziali, GNSS e SLAM per offrire una soluzione innovativa con un interessante rapporto performance/prezzo.
Il sistema di mappatura mobile più intelligente
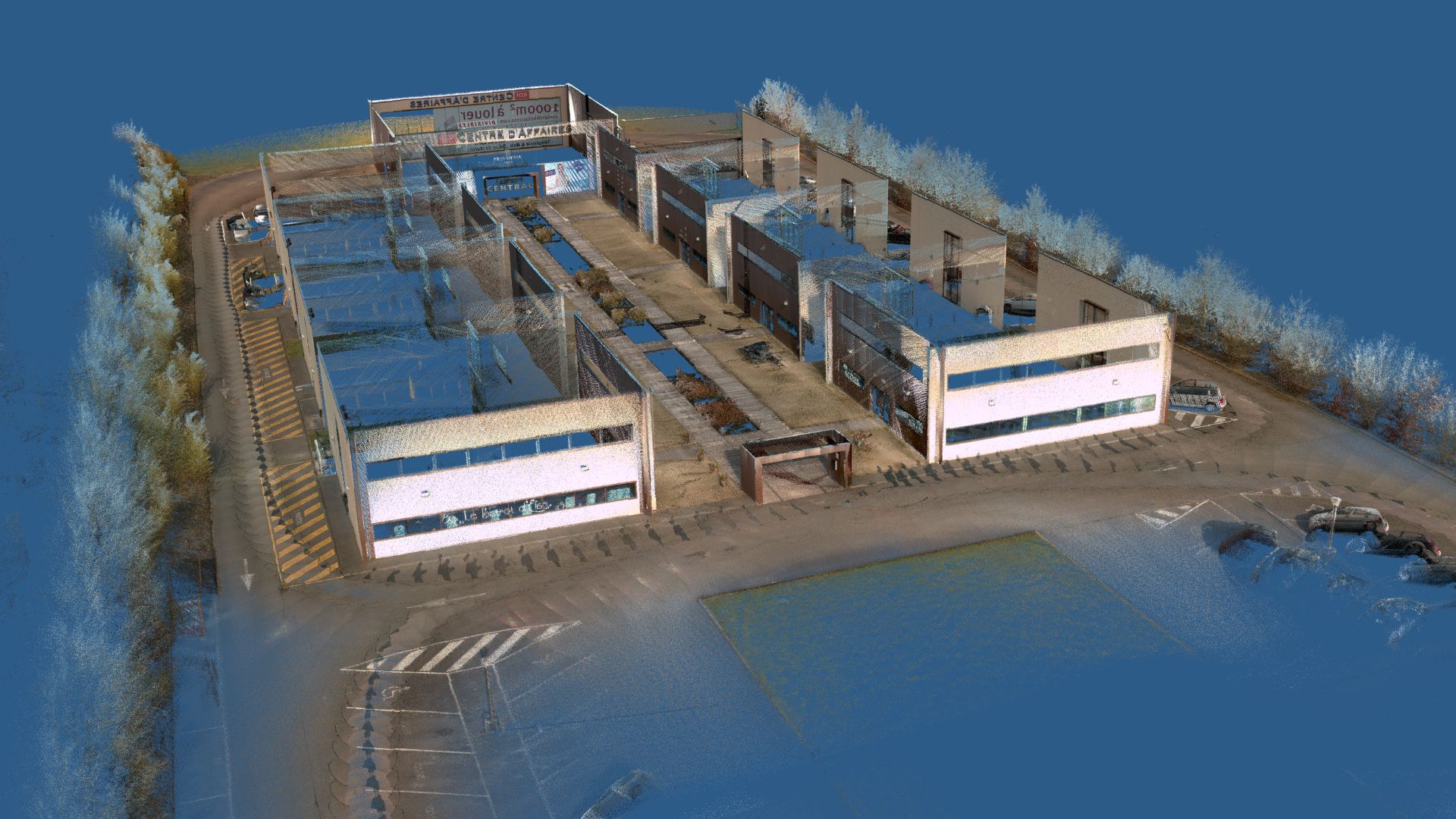
vMS3D si presenta come un classico sistema di Mobile Mapping (MMS). Integra una telecamera a 360°, un LiDAR rotante, un sistema di navigazione interno con ricevitore GNSS.
Il semplice flusso di lavoro automatico non mostra il calcolo interno sottile e tuttavia sofisticato che lo rende unico. Infatti, il vMS3D è dotato di un LiDAR aggiuntivo utilizzato per il calcolo SLAM.
Dopo l'acquisizione, il software di post-elaborazione - denominato PPiMMS - analizza automaticamente le situazioni in cui il GNSS è sufficiente, dove è preferibile l'inerziale o dove è richiesto lo SLAM.
Il meglio di GNSS, Inerziale e SLAM
La soluzione vMS3D tiene conto dei vantaggi e degli svantaggi di ciascuna tecnologia, a seconda delle loro condizioni d'uso:
- GNSS: quando il ricevitore GNSS fornisce dati affidabili, ad esempio in un ambiente a cielo aperto, la soluzione si basa sulla sua posizione. Se si verifica un'interruzione o un disturbo del GNSS, il sistema sceglie tra dati inerziali o basati su SLAM
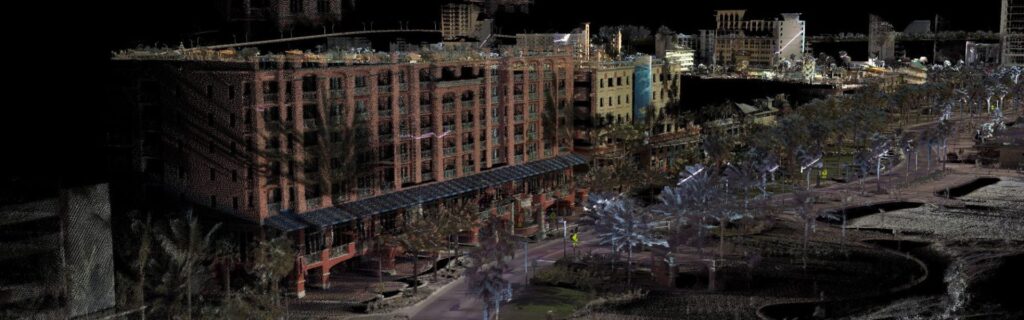
- SLAM: La posizione calcolata tramite SLAM è preferibile in ambienti densi dove gli oggetti circostanti sono molto diversi e vicini, come in canyon urbani o foreste. Le capacità SLAM sono limitate in ambienti in cui gli oggetti sono troppo distanti o non distinguibili.
- Inerziale: Le informazioni su velocità e orientamento fornite dal sistema di navigazione inerziale (INS) sono in grado di assistere la navigazione in tutti i casi in cui GNSS e SLAM sono limitati. Il sistema di navigazione inerziale fornisce rollio e beccheggio per vincolare tutti i dati LiDAR, in modo che la nuvola di punti sia riferita al livello del suolo. Anche i tassi di virata sono molto utili, specialmente quando si verifica un brusco cambio di direzione. Infatti, la compensazione dell'orientamento è necessaria tra due scansioni quando il LiDAR è in movimento.
Ellipse-D, la scelta intelligente di VIAMETRIS
Già molto soddisfatto del Ellipse per il suo iMS3D indoor, Jérôme Ninot, fondatore di VIAMETRIS, non ha dovuto cercare molto per scegliere un INS il suo nuovo progetto innovativo.
"Ellipse INS dati di velocità molto, molto precisi", afferma Ninot.
L'innovativo calcolo SLAM consente a VIAMETRIS di affidarsi a sensori inerziali miniaturizzati ed economici, mentre altri sistemi presenti sul mercato richiedono sistemi inerziali con una precisione maggiore. Ellipse garantiscono un'accuratezza di 0,1°.
Il Sig. Ninot ha scelto anche il modello Ellipse-D per il suo fattore di forma all-in-one e miniaturizzato, e per il ricevitore GNSS RTK integrato.
“Con un INS integrato come l'Ellipse-D, che offre un'unica interfaccia di comunicazione e una sincronizzazione integrata con GNSS e LiDAR, siamo stati in grado di concentrarci sulla nostra esperienza SLAM” aggiunge il CEO, prima di menzionare che meno cavi sono sempre una buona scelta.
Ellipse-D, un partner per molti compiti
Integrato in questa soluzione innovativa, l' Ellipse-D svolge diversi compiti. In primo luogo, fornisce rollio e beccheggio per vincolare tutti i dati LiDAR, quindi la nuvola di punti è referenziata a livello del suolo.
In secondo luogo, le velocità di virata dell' Ellipse-D sono molto utili, soprattutto quando si verifica un brusco cambio di direzione. Infatti, è necessaria la compensazione dell'orientamento tra due scansioni quando il LiDAR è in movimento.
Infine, l' Ellipse-D fonde in tempo reale le informazioni inerziali e GNSS per fornire eccellenti misurazioni della velocità, che sono anche molto importanti per assistere continuamente gli algoritmi interni del vMS3D.

Ellipse-D
L'Ellipse-D è un sistema di navigazione inerziale che integra una doppia antenna e un GNSS RTK a doppia frequenza compatibile con il nostro software di post-elaborazione Qinertia.
Progettato per applicazioni robotiche e geospaziali, può fondere l'input dell'odometro con Pulse o CAN OBDII per una maggiore accuratezza della navigazione stimata.

Richiedi un preventivo per Ellipse-D
Ha delle domande?
Benvenuti nella nostra sezione FAQ! Qui troverete le risposte alle domande più comuni sulle applicazioni che presentiamo. Se non trovate quello che state cercando, non esitate a contattarci direttamente!
Come posso combinare sistemi inerziali con un LIDAR per la mappatura con droni?
La combinazione dei sistemi inerziali di SBG Systems con LiDAR per la mappatura con droni migliora l'accuratezza e l'affidabilità nell'acquisizione di dati geospaziali precisi.
Ecco come funziona l'integrazione e come apporta vantaggi alla mappatura basata su drone:
- Un metodo di telerilevamento che utilizza impulsi laser per misurare le distanze dalla superficie terrestre, creando una mappa 3D dettagliata del terreno o delle strutture.
- L'INS di SBG Systems combina una Inertial Measurement Unit (IMU) con dati GNSS per fornire posizionamento, orientamento (beccheggio, rollio, imbardata) e velocità precisi, anche in ambienti privi di GNSS.
Il sistema inerziale di SBG è sincronizzato con i dati LiDAR. L'INS traccia con precisione la posizione e l'orientamento del drone, mentre il LiDAR cattura i dettagli del terreno o degli oggetti sottostanti.
Conoscendo l'orientamento preciso del drone, i dati LiDAR possono essere posizionati accuratamente nello spazio 3D.
Il componente GNSS fornisce il posizionamento globale, mentre l'IMU offre dati di orientamento e movimento in tempo reale. Questa combinazione garantisce che, anche quando il segnale GNSS è debole o non disponibile (ad esempio, vicino a edifici alti o foreste dense), l'INS possa continuare a tracciare la traiettoria e la posizione del drone, consentendo una mappatura LiDAR coerente.
Cos'è il Multibeam Echo Sounding?
L'ecoscandaglio multibeam (MBES) è una tecnica avanzata di rilevamento idrografico utilizzata per mappare il fondale marino e le caratteristiche sottomarine con elevata precisione.
A differenza dei tradizionali ecoscandagli a fascio singolo che misurano la profondità in un singolo punto direttamente sotto l'imbarcazione, MBES utilizza una serie di fasci sonar per acquisire simultaneamente misurazioni della profondità su un'ampia porzione del fondale marino. Ciò consente una mappatura dettagliata ad alta risoluzione del terreno sottomarino, inclusi la topografia, le caratteristiche geologiche e i potenziali pericoli.
I sistemi MBES emettono onde sonore che viaggiano attraverso l'acqua, rimbalzando sul fondale marino e tornando all'imbarcazione. Analizzando il tempo impiegato dagli echi per tornare, il sistema calcola la profondità in più punti, creando una mappa completa del paesaggio sottomarino.
Questa tecnologia è essenziale per varie applicazioni, tra cui la navigazione, le costruzioni marittime, il monitoraggio ambientale e l'esplorazione delle risorse, fornendo dati critici per operazioni marittime sicure e la gestione sostenibile delle risorse marine.
Qual è la differenza tra RTK e PPK?
Il Real-Time Kinematic (RTK) è una tecnica di posizionamento in cui le correzioni GNSS vengono trasmesse in tempo quasi reale, tipicamente utilizzando un flusso di correzione in formato RTCM. Tuttavia, possono esserci delle sfide nell'assicurare le correzioni GNSS, in particolare la loro completezza, disponibilità, copertura e compatibilità.
Il vantaggio principale del PPK rispetto al post-processing RTK è che le attività di elaborazione dei dati possono essere ottimizzate durante il post-processing, inclusa l'elaborazione in avanti e all'indietro, mentre nell'elaborazione in tempo reale, qualsiasi interruzione o incompatibilità nelle correzioni e nella loro trasmissione porterà a un posizionamento di minore accuratezza.
Un primo vantaggio chiave del post-processing GNSS (PPK) rispetto al tempo reale (RTK) è che il sistema utilizzato sul campo non necessita di un datalink/radio per alimentare le correzioni RTCM provenienti dal CORS nel sistema INS/GNSS.
La principale limitazione all'adozione del post-processing è il requisito che l'applicazione finale agisca sull'ambiente. D'altra parte, se la tua applicazione può sopportare il tempo di elaborazione aggiuntivo necessario per produrre una traiettoria ottimizzata, migliorerà notevolmente la qualità dei dati per tutti i tuoi deliverable.
