
Le filtre de Kalman étendu (EKF) est un outil puissant utilisé dans les systèmes de navigation et de contrôle pour estimer l'état d'un système qui évolue dans le temps. Il s'agit d'une extension du filtre de Kalman, conçue pour traiter les systèmes non linéaires, ce qui le rend essentiel pour les applications où la relation entre les variables n'est pas linéaire.
Cet algorithme puissant est utilisé pour estimer l'état d'un système dynamique à partir de mesures de capteurs bruitées. Il s'appuie sur le filtre de Kalman standard en s'adaptant aux systèmes non linéaires, qui sont courants dans les scénarios de navigation réels. Alors que le filtre de Kalman traditionnel suppose une dynamique linéaire et un bruit gaussien, l'EKF surmonte ces limitations en linéarisant le système non linéaire autour de l'estimation actuelle. Cela lui permet de fonctionner efficacement dans des environnements réels plus complexes.
Principe de base du filtre de Kalman étendu
À la base, l'EKF met continuellement à jour un vecteur d'état, un ensemble de variables qui décrivent l'état actuel du système, telles que la position, la vitesse et l'orientation dans les contextes de navigation. Il s'appuie sur un modèle de processus pour prédire comment l'état évolue au fil du temps, en intégrant la dynamique du système et les entrées de contrôle. Parallèlement, le modèle de mesure relie les données des capteurs entrants à l'état estimé, et une matrice de covariance représente l'incertitude dans les prédictions et les observations, aidant l'EKF à équilibrer la confiance entre les estimations du modèle et les entrées des capteurs.
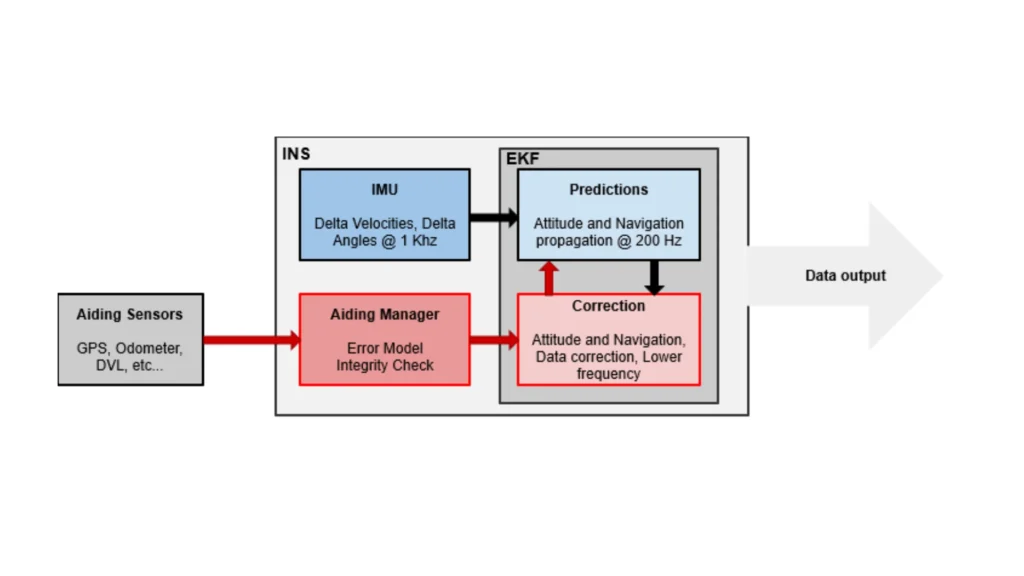
Le filtre fonctionne en deux phases principales : prédiction et mise à jour. Durant la phase de prédiction, il utilise le modèle de processus pour prévoir l'état suivant et prédire l'incertitude associée en mettant à jour la matrice de covariance. Pour gérer la non-linéarité, l'EKF linéarise les modèles de processus et de mesure à l'aide de matrices jacobiennes – des représentations mathématiques qui approximent le comportement du système près de l'estimation actuelle.
Dans la phase de mise à jour, l'EKF intègre de nouvelles mesures de capteurs pour affiner sa prédiction. Il calcule le gain de Kalman, qui détermine le poids à attribuer aux nouvelles mesures par rapport à l'état prédit. Ce gain permet à l'EKF d'ajuster l'estimation de l'état en conséquence et de mettre à jour la covariance pour refléter l'incertitude réduite après la mesure.
Application de l'EKF dans les applications modernes
Le filtre de Kalman étendu (EKF) est largement utilisé dans les systèmes de navigation modernes en raison de sa capacité à fournir des estimations d'état précises en présence de bruit et de complexité du système. Par exemple, les systèmes de navigation inertielle (INS) reposent sur des accéléromètres et des gyroscopes, qui sont sujets à la dérive et au bruit. L'EKF combine les données des capteurs pour fournir des estimations stables de la position, de la vitesse et de l'orientation des plateformes dynamiques. Ces estimations sont essentielles au fonctionnement fiable des véhicules autonomes, des aéronefs et d'autres systèmes mobiles.
Dans la robotique et les systèmes autonomes, l'EKF permet une localisation et une cartographie robustes. Les robots utilisent des capteurs tels que le LiDAR ou des caméras pour estimer la position et mettre à jour les cartes à l'aide d'un filtre de Kalman étendu (EKF). Cela permet une cartographie et une localisation en temps réel, soutenant un fonctionnement sûr et autonome dans des environnements inconnus ou dynamiques.
Dans l'aérospatiale et la défense, l'EKF joue un rôle essentiel dans les systèmes de guidage et de suivi. Il permet aux aéronefs, aux missiles et aux engins spatiaux de maintenir une position et une trajectoire précises, même dans des conditions de mouvement non linéaires. L'EKF continue de fonctionner de manière fiable lorsqu'il est exposé à des perturbations externes qui pourraient autrement dégrader la précision de la navigation.
La technologie derrière l'EKF comprend plusieurs composants essentiels. Les matrices jacobiennes prennent en charge le processus de linéarisation, tandis que la fusion de capteurs intègre les données provenant de plusieurs sources pour garantir la résilience et la précision. Pour prendre en charge le fonctionnement en temps réel, l'EKF dépend d'algorithmes de calcul efficaces pour les opérations matricielles, les mises à jour de covariance et l'intégration des mesures.
En conclusion, le filtre de Kalman étendu (EKF) est un outil essentiel dans les systèmes de navigation avancés. En étendant le filtre de Kalman pour traiter les systèmes non linéaires, vous obtenez une estimation d'état précise et en temps réel. Il prend en charge un large éventail d'applications, notamment la robotique, l'ADAS automobile, l'aérospatiale et les systèmes de défense. La maîtrise des principes et des technologies de l'EKF est essentielle pour développer des solutions de navigation haute performance dans des environnements complexes et dynamiques.
