


Ekinox-E Zapewnia dane dotyczące orientacji, kołysania i nawigacji
Ekinox-E należy do serii Ekinox, linii bardzo wydajnych systemów inercyjnych opartych na technologii MEMS, które osiągają wyjątkowe parametry orientacji i nawigacji w kompaktowej i przystępnej cenowo obudowie.
Jest to system nawigacji inercyjnej (INS), który dostarcza dane dotyczące orientacji i nawigacji nawet podczas przerw w dostawie sygnału GNSS. Aby poprawić dokładność orientacji, podłącz Ekinox-E do zewnętrznego urządzenia wspomagającego, takiego jak odbiorniki GNSS, 1xDVL lub odometer. Opracowaliśmy specjalne kable “split”, aby uprościć integrację z urządzeniami zewnętrznymi.
Odkryj wszystkie funkcje i zastosowania.
Funkcje Ekinox-E
Odkryj zaawansowane możliwości Ekinox-E, gdzie nasz podstawowy IMU łączy najnowocześniejszą technologię MEMS z autorską integracją, zapewniając wyjątkową wydajność w przystępnej cenie.
IMU Ekinox integruje trzy pojemnościowe akcelerometry MEMS, ulepszone dzięki zaawansowanym technikom filtrowania, zapewniając dokładność na poziomie kwarcowym. Dzięki wyjątkowo niskiemu VRE akcelerometry te utrzymują wysoką wydajność nawet w trudnych, intensywnie wibracyjnych warunkach.
Uzupełnia to zestaw trzech wysokiej klasy taktycznych żyroskopów MEMS, próbkowanych z częstotliwością 2,3 kHz. Dzięki unikalnej integracji i zaawansowanemu przetwarzaniu sygnałów — w tym filtrom FIR — żyroskopy te zapewniają doskonałą wydajność w dynamicznych środowiskach.
Poznaj wyjątkowe funkcje i specyfikacje Ekinox-E, aby zobaczyć, jak może on podnieść jakość Twojego projektu.




Specyfikacje
Wydajność ruchu i nawigacji
1.2 m Pozycja pionowa Single point
1.2 m Pozycja pozioma RTK
0.01 m + 0.5 ppm * Pozycja pionowa RTK
0,015 m + 1 ppm * Pozycja pozioma PPK
0,01 m + 0,5 ppm ** Wertykalna pozycja PPK
0,015 m + 1 ppm ** Pojedynczy punkt roll/pitch
0.02 ° Roll/Pitch RTK
0,015 ° * Roll/pitch PPK
0,01 ° ** Pojedynczy punkt heading
0.05 ° Heading RTK
0,04 ° * Heading PPK
0,03 ° **
Funkcje nawigacyjne
Pojedyncza i podwójna antena GNSS Dokładność kołysania w czasie rzeczywistym
5 cm lub 5 % wysokości fali Okres fali kołysania w czasie rzeczywistym
Od 0 do 20 s Tryb kołysania w czasie rzeczywistym
Automatyczna regulacja Dokładność opóźnionego kołysania
2 cm lub 2% Okres fali opóźnionego kołysania
0 do 40 s
Profile ruchu
Statki nawodne, pojazdy podwodne, badania morskie, środowisko morskie i trudne warunki morskie Air
Samoloty, helikoptery, statki powietrzne, UAV Land
Samochody, motoryzacja, pociągi/koleje, ciężarówki, pojazdy dwukołowe, maszyny ciężkie, piesi, plecaki, teren
Wydajność GNSS
Zewnętrzny (niedostarczony) Zakres częstotliwości
Zależnie od zewnętrznego odbiornika GNSS Funkcje GNSS
Zależnie od zewnętrznego odbiornika GNSS Sygnały GPS
Zależnie od zewnętrznego odbiornika GNSS Sygnały Galileo
Zależnie od zewnętrznego odbiornika GNSS Sygnały Glonass
Zależnie od zewnętrznego odbiornika GNSS Sygnały Beidou
Zależnie od zewnętrznego odbiornika GNSS Inne sygnały
Zależnie od zewnętrznego odbiornika GNSS Czas ustalenia pozycji GNSS (time to first fix)
Zależnie od zewnętrznego odbiornika GNSS Zakłócanie i spoofing
Zależnie od zewnętrznego odbiornika GNSS
Specyfikacje środowiskowe i zakres roboczy
IP-68 Temperatura pracy
-40 °C do 75 °C Wibracje
3 g RMS – 20 Hz do 2 kHz Wstrząsy
500 g przez 0,3 ms MTBF (obliczony)
50 000 godzin Zgodność z
MIL-STD-810, EN60945
Interfejsy
GNSS, RTCM, licznik przebiegu, DVL Protokoły output
NMEA, Binary sbgECom, TSS, Simrad, Dolog Protokoły Input
NMEA, Trimble, Novatel, Septentrio, Hemisphere, DVL (PD0, PD6, Teledyne, Nortel) Datalogger
8 GB lub 48 h @ 200 Hz Output rate
Do 200 Hz Ethernet
Full duplex (10/100 base-T), zegar główny PTP, NTP, interfejs web, FTP, REST API Porty szeregowe
RS-232/422 do 921 kbps: 3 wyjścia / 5 wejść CAN
1x CAN 2.0 A/B, do 1 Mbps Sync OUT
PPS, trigger do 200 Hz, wirtualny licznik przebiegu – 2 wyjścia Sync IN
PPS, licznik przebiegu, znacznik zdarzeń do 1 kHz – 5 wejść
Specyfikacje mechaniczne i elektryczne
Od 9 do 36 VDC Pobór mocy
3 W Zasilanie anteny
5 VDC - maks. 150 mA na antenę | Zysk: 17 - 50 dB * Waga (g)
400 g Wymiary (dł. x szer. x wys.)
100 mm x 86 mm x 58 mm
Specyfikacje czasowe
< 200 ns Dokładność PTP
< 1 µs Dokładność PPS
< 1 µs (jitter < 1 µs) Dryf w Nawigacji Zliczeniowej
1 ppm

Zastosowania Ekinox-E
Ekinox został zaprojektowana zapewnić precyzyjną nawigację i orientację w różnych branżach, gwarantując stałą wysoką wydajność nawet w trudnych warunkach. Łatwo integruje się z zewnętrznymi GNSS , umożliwiając wszystkim GNSS dostarczanie niezbędnych danych dotyczących prędkości i pozycji. Gwarantujemy bezpłatne i dożywotnie aktualizacje oprogramowania układowego tego produktu.
Systemy z podwójną anteną zapewniają dodatkową zaletę w postaci dokładności True Heading, a GNSS RTK GNSS mogą być wykorzystywane do znacznego zwiększenia precyzji pozycjonowania.
Poznaj precyzję i wszechstronność Ekinox oraz odkryj jego zastosowania.
Karta katalogowa Ekinox-E
Pobierz wszystkie cechy i specyfikacje czujnika prosto na swoją skrzynkę odbiorczą!
Porównaj Ekinox-E z innymi produktami
Porównaj naszą najbardziej zaawansowaną serię czujników inercyjnych do nawigacji, ruchu i pomiaru kołysania.
Pełne specyfikacje można znaleźć w instrukcji obsługi sprzętu dostępnej na żądanie.
-

Ekinox-E
- Pozycja pozioma RTK
- 0,01 m + 0,5 ppm *
- Roll/Pitch RTK
- 0,015° *
- Heading RTK
- 0,04° *
- Protokoły wyjściowe (OUT)
- NMEA, Binary sbgECom, TSS, Simrad, Dolog
- Protokoły IN
- NMEA, Trimble, Novatel, Septentrio, Hemisphere, DVL (PD0, PD6, Teledyne, Nortel)
- Waga (g)
- 400 g
- Wymiary (dł. x szer. x wys.)
- 130 × 100 × 75 mm
-
- Pozycja pozioma RTK
- 0.01 m + 1 ppm
- Roll/Pitch RTK
- 0.05 °
- Heading RTK
- 0.2 °
- Protokoły wyjściowe (OUT)
- NMEA, Binary sbgECom, TSS, KVH, Dolog
- Protokoły IN
- NMEA, Novatel, Septentrio, u-blox, PD6, Teledyne Wayfinder, Nortek
- Waga (g)
- 65 g
- Wymiary (dł. x szer. x wys.)
- 46 × 45 × 32 mm
-
- Pozycja pozioma RTK
- 0.01 m + 0.5 ppm
- Roll/Pitch RTK
- 0.015 °
- Heading RTK
- 0.05 °
- Protokoły wyjściowe (OUT)
- NMEA, Binary sbgECom, TSS, Simrad, Dolog
- Protokoły IN
- NMEA, Trimble, Novatel, Septentrio, Hemisphere, DVL (PD0, PD6, Teledyne, Nortel)
- Waga (g)
- 165 g
- Wymiary (dł. x szer. x wys.)
- 42 × 57 × 60 mm
-
- Pozycja pozioma RTK
- 0.01 m + 0.5 ppm
- Roll/Pitch RTK
- 0.008 °
- Heading RTK
- 0.02 °
- Protokoły wyjściowe (OUT)
- NMEA, Binary sbgECom, TSS, Simrad, Dolog
- Protokoły IN
- NMEA, Trimble, Novatel, Septentrio, Hemisphere, DVL (PD0, PD6, Teledyne, Nortel)
- Waga (g)
- < 900 g
- Wymiary (dł. x szer. x wys.)
- 130 × 100 × 75 mm



Kompatybilność z Ekinox-E
Dokumentacja i zasoby
Ekinox-E jest dostarczany z obszerną dokumentacją online, zaprojektowana, aby wspierać użytkowników na każdym kroku. Od przewodników instalacji po zaawansowaną konfigurację i rozwiązywanie problemów, nasze jasne i szczegółowe instrukcje zapewniają płynną integrację i obsługę.
Nasze studia przypadków
Poznaj rzeczywiste przypadki użycia, pokazujące, jak nasz INS zwiększa wydajność, skraca czas przestoju i poprawia efektywność operacyjną. Dowiedz się, jak nasze zaawansowane sensory i intuicyjne interfejsy zapewniają precyzję i kontrolę potrzebną do osiągnięcia doskonałych wyników w Twoich aplikacjach.
OPSIA rozszerza swoje rozwiązanie dzięki integracji Ekinox INS
Echosonda wielowiązkowa i skaner laserowy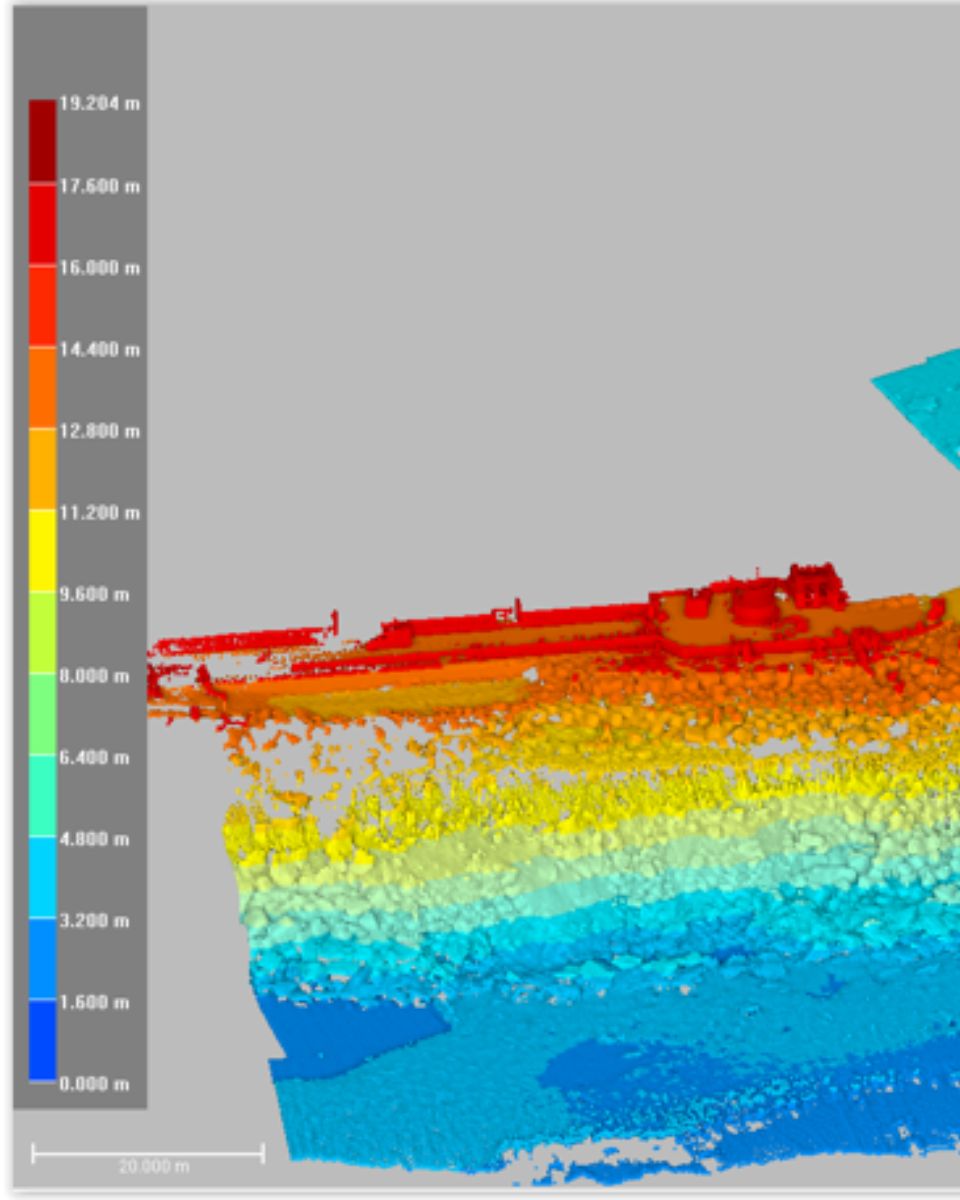
Rozwiązanie ASV integrujące INS firmy SBG Systems i echosondę wielowiązkową
ASV – Autonomiczne pojazdy nawodne




Dodatkowe produkty i akcesoria
Odkryj, jak nasze rozwiązania mogą zrewolucjonizować Twoją działalność, zapoznając się z naszą różnorodną ofertą zastosowań. Dzięki naszym czujnikom ruchu i nawigacji oraz oprogramowaniu uzyskujesz dostęp do najnowocześniejszych technologii, które napędzają sukces i innowacje w Twojej dziedzinie.
Dołącz do nas, aby odblokować potencjał nawigacji inercyjnej i rozwiązań pozycjonowania w różnych branżach.
Qinertia GNSS-INS

Kable

Anteny GNSS
Nasz proces produkcyjny
Odkryj precyzję i wiedzę ekspercką, które kryją się za każdym produktem SBG Systems. Ten film oferuje wgląd w to, jak skrupulatnie projektujemy, produkujemy i testujemy nasze wysokowydajne inercyjne systemy nawigacyjne. Od zaawansowanej inżynierii po rygorystyczną kontrolę jakości, nasz proces produkcyjny zapewnia, że każdy produkt spełnia najwyższe standardy niezawodności i dokładności.
Obejrzyj teraz, aby dowiedzieć się więcej!

Zapytaj o wycenę
Oni o nas mówią
Prezentujemy doświadczenia i referencje od profesjonalistów z branży i klientów, którzy wykorzystali nasze produkty w swoich projektach. Dowiedz się, jak nasza innowacyjna technologia zmieniła ich działalność, zwiększyła produktywność i zapewniła niezawodne wyniki w różnych zastosowaniach.
Sekcja FAQ
Witamy w naszej sekcji FAQ, gdzie odpowiadamy na najczęściej zadawane pytania dotyczące naszej najnowocześniejszej technologii i jej zastosowań. Znajdziesz tutaj wyczerpujące odpowiedzi dotyczące funkcji produktów, procesów instalacji, wskazówek dotyczących rozwiązywania problemów i najlepszych praktyk, aby zmaksymalizować korzyści z naszych systemów inercyjnych.
Znajdź odpowiedzi tutaj!
Czy INS akceptuje dane wejściowe z zewnętrznych czujników wspomagających?
Inercyjne systemy nawigacyjne z naszej firmy akceptują dane wejściowe z zewnętrznych czujników wspomagających, takich jak czujniki danych lotniczych, magnetometry, odometry, DVL i inne.
Ta integracja sprawia, że INS jest wysoce wszechstronny i niezawodny, szczególnie w środowiskach, gdzie sygnał GNSS jest niedostępny.
Te zewnętrzne czujniki poprawiają ogólną wydajność i dokładność INS, dostarczając uzupełniające się dane.
Jak mogę połączyć systemy inercyjne z LIDAR-em do mapowania dronem?
Połączenie systemów inercyjnych SBG Systems z LiDAR-em do mapowania dronowego zwiększa dokładność i niezawodność w pozyskiwaniu precyzyjnych danych geoprzestrzennych.
Oto jak działa integracja i jakie korzyści przynosi mapowaniu z wykorzystaniem dronów:
- Metoda teledetekcji wykorzystująca impulsy laserowe do pomiaru odległości od powierzchni Ziemi, tworząca szczegółową mapę 3D terenu lub struktur.
- Systemy INS SBG Systems łączą inercyjną jednostkę pomiarową (IMU) z danymi GNSS, aby zapewnić dokładne pozycjonowanie, orientację (pitch, roll, yaw) i prędkość, nawet w środowiskach pozbawionych sygnału GNSS.
System inercyjny SBG jest zsynchronizowany z danymi LiDAR. INS dokładnie śledzi pozycję i orientację drona, podczas gdy LiDAR rejestruje szczegóły terenu lub obiektu poniżej.
Dzięki znajomości dokładnej orientacji drona, dane LiDAR mogą być precyzyjnie umieszczone w przestrzeni 3D.
Komponent GNSS zapewnia globalne pozycjonowanie, natomiast IMU oferuje dane o orientacji i ruchu w czasie rzeczywistym. Takie połączenie zapewnia, że nawet gdy sygnał GNSS jest słaby lub niedostępny (np. w pobliżu wysokich budynków lub gęstych lasów), INS może kontynuować śledzenie ścieżki i pozycji drona, umożliwiając spójne mapowanie LiDAR.
Jak działa antena samonaprowadzająca?
Antena samonaprowadzająca automatycznie ustawia się na satelitę lub źródło sygnału, aby utrzymać stabilne łącze komunikacyjne. Wykorzystuje czujniki takie jak żyroskopy, akcelerometry oraz GNSS do określenia swojej orientacji i lokalizacji.
Po włączeniu antena oblicza niezbędne korekty, aby ustawić się w linii z żądanym satelitą. Silniki i siłowniki przesuwają antenę do prawidłowej pozycji. System stale monitoruje swoje ustawienie i dokonuje korekt w czasie rzeczywistym, aby zrekompensować wszelkie ruchy, na przykład na poruszającym się pojeździe lub statku.
Zapewnia to niezawodne połączenie, nawet w dynamicznych środowiskach, bez ręcznej interwencji.
Jak kontrolować opóźnienia wyjściowe w operacjach UAV?
Kontrolowanie opóźnień wyjściowych w operacjach UAV jest niezbędne do zapewnienia responsywnej wydajności, precyzyjnej nawigacji i skutecznej komunikacji, szczególnie w obronnych lub krytycznych dla misji zastosowaniach.
Opóźnienie wyjściowe jest ważnym aspektem w aplikacjach sterowania w czasie rzeczywistym, gdzie wyższe opóźnienie wyjściowe może pogorszyć wydajność pętli sterowania. Nasze oprogramowanie wbudowane INS zostało zaprojektowana w celu zminimalizowania opóźnienia wyjściowego: po próbkowaniu danych z czujników, Filtr Kalmana (EKF) wykonuje małe i stałe obliczenia czasowe przed wygenerowaniem wyjść. Zazwyczaj obserwowane opóźnienie wyjściowe jest mniejsze niż jedna milisekunda.
Opóźnienie przetwarzania należy dodać do opóźnienia transmisji danych, jeśli chcesz uzyskać całkowite opóźnienie. To opóźnienie transmisji różni się w zależności od interfejsu. Na przykład, wiadomość o długości 50 bajtów wysłana przez interfejs UART z prędkością 115200 bps zajmie 4 ms na pełną transmisję. Rozważ wyższe prędkości transmisji, aby zminimalizować opóźnienie wyjściowe.
Co oznacza UART?
UART to skrót od Universal Asynchronous Receiver-Transmitter (uniwersalny asynchroniczny odbiornik-nadajnik).
Jest to interfejs komunikacji sprzętowej, który konwertuje dane równoległe z procesora na formę szeregową do transmisji, a następnie konwertuje odebrane dane szeregowe z powrotem na formę równoległą.
- Uniwersalny → Może współpracować z różnymi konfiguracjami (prędkość transmisji, bity danych, bity stopu, parzystość).
- Asynchroniczny → Nie używa wspólnej linii zegarowej; synchronizacja jest obsługiwana za pomocą bitów startu i stopu.
- Odbiornik-Nadajnik → Zarówno wysyła (nadajnik), jak i odbiera (odbiornik) dane przez kanał szeregowy.
UART jest powszechnie stosowany w systemach wbudowanych, w tym w systemach nawigacji inercyjnej (INS), do przesyłania danych z czujników pomiędzy IMU a procesorem w prosty i niezawodny sposób.
