Marine Technology integruje INS/GNSS firmy SBG w swoim USV HydroDron
Nasz klient, Marine Technology, zaprezentował na targach BaltExpo swój całkowicie nowy hydrograficzny statek bezzałogowy wyposażony w nasz Ekinox-D INS.
“Ekinox-D to idealny RTK INS/GNSS dla USV, ponieważ łączy w sobie GNSS klasy pomiarowej w bardzo kompaktowej obudowie.” | Marine Technology

Podczas targów Baltexpo 2019 firma Marine Technology zaprezentowała HydroDron, pierwszy autonomiczny hydrograficzny bezzałogowy statek w Polsce. Niedawno zakończony projekt został współfinansowany przez Narodowe Centrum Badań i Rozwoju i otrzymał nagrodę w konkursie Baltexpo Golden Anchor 2019.

HydroDron Umożliwia Badania na Niedostępnych Wodach
HydroDron to bezzałogowy katamaran wykonany z lekkiego i wytrzymałego materiału, z systemem dwukadłubowym (4 m długości i 2 m szerokości).
Część silnikowa, wyposażona w dwa silniki elektryczne pracujące niezależnie od siebie, zapewnia odpowiednią prędkość i zwrotność, osiągając maksymalną prędkość ponad 10 węzłów.
Ta autonomiczna i zdalnie sterowana platforma pływająca, przeznaczona do pomiarów hydrograficznych na wodach o ograniczonym dostępie, charakteryzuje się mobilnością.
Możliwe jest przewiezienie jej na obszar misji na przyczepie samochodowej lub większym statku nawodnym i zwodowanie z przyczepy z plaży, brzegu, nabrzeża, platformy lub statku nawodnego.
HydroDron działa na wodach niedostępnych lub trudnych dla większych jednostek załogowych, co uniemożliwia lub czyni nieopłacalnym ich użycie.
USV W Pełni Wyposażony do Hydrografii
Rozwój autonomicznej nawigacji platformy i automatycznych systemów hydrografii 3D stanowi znaczące ulepszenie zdalnie sterowanej, wielozadaniowej platformy nawodnej Marine Technology do pracy w obszarach portowych i innych obszarach o ograniczonym dostępie.
Platforma będzie teraz mogła wykonywać misje batymetryczne, sonarowe i inne pomiarowe w pełni autonomicznym trybie, wdrażając adaptacyjne planowanie trajektorii i automatyczną analizę 3D danych pomiarowych sytuacji w czasie niemal rzeczywistym wokół platformy.
Wyposażenie HydroDron
HydroDron integruje szeroką gamę urządzeń pomiarowych w celu zapewnienia wielu różnych wariantów:
- Zintegrowany system batymetryczny i sonarowy 3DSS-DX-450 firmy Ping DSP
- Komputer przemysłowy do akwizycji danych Getac S410 (główny element stacji hydrograficznej)
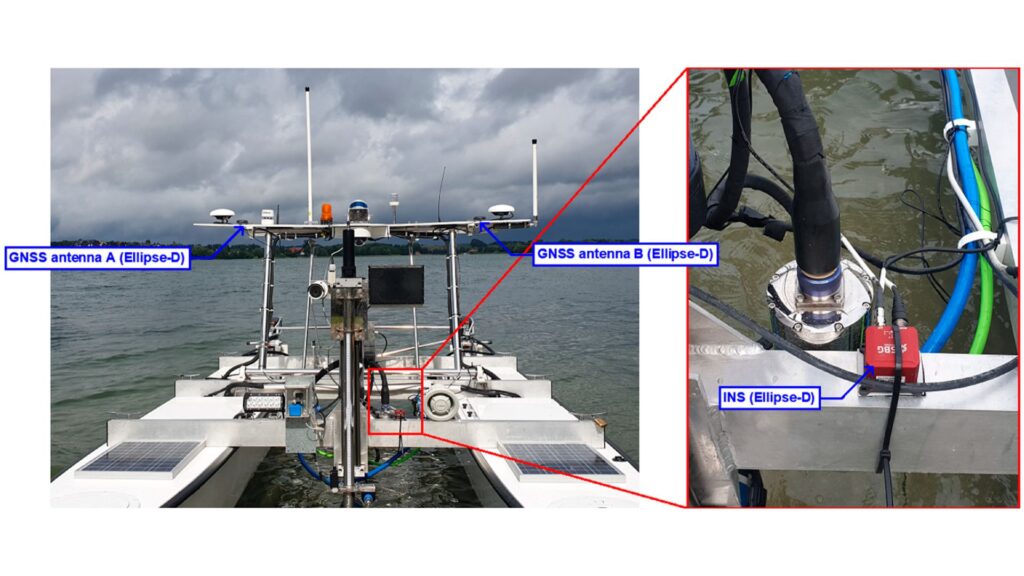
- Zewnętrzny dwuantenowy inercyjny system nawigacyjny Ekinox2-D firmy SBG Systems
- Jednowiązkowy, dwuczęstotliwościowy sonar HydroBox HD firmy Syqwest
- Jednowiązkowy sonar wysokiej częstotliwości Echologger EU400
- LiDAR PUCK VLP-16 firmy Velodyne
System czujników monitoruje platformę i jej otoczenie, aby zwiększyć świadomość sytuacyjną. Ponadto obejmuje on dwie sondy pionowe, po jednej na kadłub, dwie kamery wideo i stację pogodową. Dodatkowo system rejestruje dane nawigacyjne, obraz wideo z obu kamer, warunki pogodowe, napięcie akumulatora i głębokość zanurzenia pływaków. Co więcej, radar i dwa laserowe dalmierze na dziobie i rufie wspierają system antykolizyjny jednostki.

Stacja brzegowa odbiera dane nawigacyjne, zarządzane przez dwie konsole:
- konsolę nawigacyjną
- konsolę hydrograficzną z komputerem Getac.
Oprogramowanie Hypack zapewnia pomiary hydrograficzne, od planowania pracy po opracowanie produktu końcowego. Dane hydrograficzne z sondy wielowiązkowej i LiDAR są rejestrowane na pokładzie komputerów przemysłowych.
Inercyjny System Nawigacyjny Ekinox-D
Kompaktowy system INS z dwiema antenami Ekinox-D firmy SBG Systems integruje IMU klasy geodezyjnej z dwuantenowym odbiornikiem RTK GNSS. Ponadto, ten zaawansowany system INS/GNSS zapewnia orientację, kompensację heave i dokładność pozycjonowania na poziomie centymetrów. Niewielkie rozmiary, niska waga i wytrzymała obudowa IP68 sprawiają, że idealnie nadaje się do zastosowań w przestrzeniach o ograniczonej powierzchni, takich jak USV. Dodatkowo, czujniki Ekinox są wyposażone w data logger o pojemności 8 GB do analizy pooperacyjnej lub post-processingu.
Ponadto system zawiera łatwy w obsłudze interfejs internetowy, który upraszcza obsługę. Dane z tego czujnika inercyjnego mogą być również przetwarzane w oprogramowaniu PPK firmy SBG, Qinertia.
Ostatecznie, Qinertia zwiększa wydajność SBG INS poprzez przetwarzanie danych inercyjnych z surowymi obserwacjami GNSS. Zapewnia również korekcje RTK offline z ponad 8000 stacji bazowych w 164 krajach, które są zawsze aktualizowane.


Ekinox-D
Ekinox-D to kompleksowy system nawigacji inercyjnej ze zintegrowanym odbiornikiem RTK GNSS, idealny do zastosowań, w których przestrzeń jest krytyczna.
Ten zaawansowany INS/GNSS jest wyposażony w jedną lub dwie anteny i zapewnia orientację, kompensację kołysania (heave) i pozycję z dokładnością do centymetrów.

Zapytaj o wycenę Ekinox-D
Masz pytania?
Witamy w naszej sekcji FAQ! Znajdą tu Państwo odpowiedzi na najczęściej zadawane pytania dotyczące prezentowanych przez nas aplikacji. Ponadto, jeśli nie możesz znaleźć odpowiedzi, której potrzebujesz, skontaktuj się z nami bezpośrednio, aby uzyskać pomoc.
Czym są czujniki pomiaru fal?
Czujniki pomiaru fal są niezbędnymi narzędziami do zrozumienia dynamiki oceanów oraz poprawy bezpieczeństwa i wydajności operacji morskich. Dostarczając dokładne i aktualne dane o stanie falowania, pomagają w podejmowaniu decyzji w różnych sektorach, od żeglugi i nawigacji po ochronę środowiska. Boje falowe to urządzenia pływające wyposażone w czujniki do pomiaru parametrów fal, takich jak wysokość, okres i kierunek.
Zazwyczaj wykorzystują akcelerometry lub żyroskopy do wykrywania ruchu fal (np. okres fali) i mogą przesyłać dane w czasie rzeczywistym do obiektów na brzegu w celu analizy.
Co to jest hydrografia?
Hydrografia to proces pomiaru i mapowania fizycznych cech zbiorników wodnych, w tym oceanów, rzek, jezior i obszarów przybrzeżnych. Obejmuje zbieranie danych związanych z głębokością, kształtem i konturami dna morskiego (mapowanie dna morskiego), a także lokalizacją zatopionych obiektów, zagrożeń nawigacyjnych i innych podwodnych elementów (np. rowów wodnych). Hydrografia ma kluczowe znaczenie dla różnych zastosowań, w tym bezpieczeństwa nawigacji, zarządzania wybrzeżem i pomiarów wybrzeża, budownictwa i monitoringu środowiska.
Hydrografia obejmuje kilka kluczowych elementów, począwszy od batymetrii, która mierzy głębokość wody i topografię dna morskiego za pomocą systemów sonarowych, takich jak echosondy jedno- lub wielowiązkowe, które wysyłają Pulse dźwiękowe do dna morskiego i mierzą czas powrotu echa.
Dokładne pozycjonowanie ma kluczowe znaczenie i jest osiągane za pomocą globalnych systemów nawigacji satelitarnej (GNSS) oraz inercyjnych systemów nawigacyjnych (INS), które łączą pomiary głębokości z precyzyjnymi współrzędnymi geograficznymi. Dodatkowo, mierzone są dane dotyczące kolumny wody, takie jak temperatura, zasolenie i prądy, a także zbierane są dane geofizyczne w celu wykrywania obiektów podwodnych, przeszkód lub zagrożeń za pomocą narzędzi takich jak sonar boczny i magnetometry.
Co to jest batymetria?
Batymetria to badanie i pomiar głębokości i kształtu podwodnego terenu, skupiające się przede wszystkim na mapowaniu dna morskiego i innych zanurzonych krajobrazów. Jest to podwodny odpowiednik topografii, dostarczający szczegółowych informacji na temat podwodnych cech oceanów, mórz, jezior i rzek. Batymetria odgrywa kluczową rolę w różnych zastosowaniach, w tym w nawigacji, budownictwie morskim, eksploracji zasobów i badaniach środowiskowych.
Nowoczesne techniki batymetryczne opierają się na systemach sonarowych, takich jak echosondy jedno- i wielowiązkowe, które wykorzystują fale dźwiękowe do pomiaru głębokości wody. Urządzenia te wysyłają Pulse dźwiękowe w kierunku dna morskiego i rejestrują czas powrotu echa, obliczając głębokość na podstawie prędkości dźwięku w wodzie. W szczególności echosondy wielowiązkowe umożliwiają mapowanie szerokich pasów dna morskiego jednocześnie, zapewniając bardzo szczegółowe i dokładne odwzorowania dna morskiego. Często rozwiązanie RTK + INS jest powiązane w celu tworzenia precyzyjnie pozycjonowanych, trójwymiarowych reprezentacji batymetrycznych dna morskiego.
Dane batymetryczne są niezbędne do tworzenia map morskich, które pomagają bezpiecznie nawigować statkom, identyfikując potencjalne zagrożenia podwodne, takie jak zatopione skały, wraki i łachy piaskowe. Odgrywają również istotną rolę w badaniach naukowych, pomagając naukowcom zrozumieć podwodne cechy geologiczne, prądy oceaniczne i ekosystemy morskie.
Do czego służy boja?
Boja to urządzenie pływające używane głównie w środowiskach morskich i wodnych do kilku kluczowych celów. Boje są często umieszczane w określonych lokalizacjach, aby oznaczać bezpieczne przejścia, kanały lub obszary niebezpieczne w zbiornikach wodnych. Kierują one statki i jednostki pływające, pomagając im unikać niebezpiecznych miejsc, takich jak skały, płytkie wody lub wraki.
Są one używane jako punkty kotwiczenia dla statków. Boje cumownicze umożliwiają łodziom przywiązywanie się bez konieczności rzucania kotwicy, co może być szczególnie przydatne na obszarach, gdzie kotwiczenie jest niepraktyczne lub szkodliwe dla środowiska.
Wyposażone boje są wyposażone w czujniki do pomiaru warunków środowiskowych, takich jak temperatura, wysokość fal, prędkość wiatru i ciśnienie atmosferyczne. Boje te dostarczają cennych danych do prognozowania pogody, badań klimatu i badań oceanograficznych.
Niektóre boje działają jako platformy do zbierania i przesyłania danych w czasie rzeczywistym z wody lub dna morskiego, często wykorzystywane w badaniach naukowych, monitoringu środowiska i zastosowaniach wojskowych.
W rybołówstwie komercyjnym boje oznaczają lokalizację pułapek lub sieci. Pomagają również w akwakulturze, oznaczając lokalizacje podwodnych farm.
Boje mogą również oznaczać wyznaczone obszary, takie jak strefy zakazu kotwiczenia, strefy zakazu połowu lub obszary do pływania, pomagając w egzekwowaniu przepisów na wodzie.
We wszystkich przypadkach boje mają kluczowe znaczenie dla zapewnienia bezpieczeństwa, ułatwiania działalności morskiej i wspierania badań naukowych.
Co to jest wyporność?
Wyporność to siła wywierana przez płyn (taki jak woda lub powietrze), która przeciwdziała ciężarowi obiektu zanurzonego w nim. Umożliwia ona obiektom unoszenie się lub wznoszenie na powierzchnię, jeśli ich gęstość jest mniejsza niż gęstość płynu. Wyporność występuje z powodu różnicy ciśnień wywieranych na zanurzone części obiektu — większe ciśnienie jest wywierane na większych głębokościach, co tworzy siłę skierowaną do góry.
Zasada wyporu jest opisana przez prawo Archimedesa, które mówi, że skierowana w górę siła wyporu działająca na obiekt jest równa ciężarowi płynu wypartego przez ten obiekt. Jeśli siła wyporu jest większa niż ciężar obiektu, będzie on pływał; jeśli jest mniejsza, obiekt zatonie. Wyporność jest niezbędna w wielu dziedzinach, od inżynierii morskiej (projektowanie statków i okrętów podwodnych) po funkcjonalność urządzeń pływających, takich jak boje.
Czym jest ROV?
ROV, czyli zdalnie sterowany pojazd podwodny (Remotely Operated Vehicle), to bezzałogowy robot podwodny zaprojektowana do pracy w środowiskach, które są zbyt głębokie, niebezpieczne lub niedostępne dla nurków. ROV są szeroko stosowane w branżach morskich, takich jak wydobycie ropy i gazu na morzu, badania naukowe, monitorowanie środowiska i operacje morskie. W przeciwieństwie do autonomicznych pojazdów podwodnych (AUV), które działają niezależnie, podążając zaprogramowanymi ścieżkami, ROV są zazwyczaj połączone z jednostką nawodną za pomocą kabla pępowinowego, który zapewnia zasilanie, komunikację i sygnały sterujące. Kabel ten umożliwia operatorowi na powierzchni sterowanie pojazdem w czasie rzeczywistym, zapewniając precyzyjne manewrowanie, monitorowanie i kontrolę pokładowych czujników i manipulatorów.
ROV są wyposażone w różnorodne instrumenty, w zależności od ich misji. Zazwyczaj posiadają kamery wysokiej rozdzielczości do inspekcji wizualnych, systemy sonarowe do mapowania i nawigacji oraz ramiona manipulatorów do interakcji z obiektami na dnie morskim. Zaawansowane modele mogą zawierać specjalistyczne czujniki, takie jak sondy środowiskowe, magnetometry i systemy nawigacji inercyjnej (INS) w celu utrzymania dokładnego pozycjonowania w trudnych warunkach podwodnych. Ponieważ sygnały GPS/GNSS nie mogą przenikać przez wodę, ROV polegają na kombinacji akustycznych systemów pozycjonowania, logów prędkości Dopplera (DVL), czujników ciśnienia i nawigacji inercyjnej, aby oszacować swoje położenie względem jednostki nawodnej lub stałego punktu odniesienia. Precyzyjne ROV używane w budownictwie podwodnym lub badaniach naukowych często integrują taktyczne IMU, aby zapewnić dokładność na poziomie centymetrów podczas długotrwałych operacji, nawet na obszarach o słabym zasięgu akustycznym.
Konstrukcja ROV jest wysoce modułowa, co pozwala na dołączanie różnych ładunków w zależności od wymagań misji. Małe ROV klasy obserwacyjnej są lekkie i przenośne, przeznaczone do prostych inspekcji wizualnych, podczas gdy ROV klasy roboczej są znacznie większe, zdolne do wykonywania ciężkich zadań, takich jak budowa podwodna, naprawa rurociągów lub pobieranie próbek. ROV zapewniają niezrównany dostęp do środowisk podwodnych, rozszerzając możliwości człowieka i umożliwiając operacje na głębokościach i w czasie, które w innym przypadku byłyby niemożliwe. Zasadniczo ROV jest zarówno wszechstronnym narzędziem do eksploracji, jak i precyzyjną platformą do wykonywania złożonych misji podwodnych, wypełniając lukę między nadzorem człowieka a zdalnymi możliwościami robotycznymi.
