





Qinertia Oprogramowanie do post-processingu GNSS+INS (PPK)
Precyzja w prosty sposób
Qinertia
Qinertia OprogramowanieQinertia zapewnia zupełnie nowy poziom precyzyjnych rozwiązań pozycjonowania, umożliwiając solidne georeferencjonowanie dzięki zaawansowanym korektom po przetwarzaniu. W świecie, który wymaga bezkompromisowej dokładności, nasze oprogramowanie PPK staje się podstawą dla profesjonalistów i branż poszukujących niezrównanej pewności w zakresie danych lokalizacyjnych.
Oprogramowanie do postprocessingu, które naprawdę działa
Osiągnij niezrównaną dokładność w swoich procesach roboczych dzięki przetwarzaniu surowych danych lokalizacyjnych za pomocą zaawansowanego procesu korekcji. Qinertia kluczowe Qinertia w zastosowaniach wymagających centymetrowej dokładności, takich jak pomiary geoprzestrzenne, mapowanie i hydrografia.




GNSS
Qinertia obsługuje pełne GNSS w wielu konstelacjach i na wielu częstotliwościach, zapewniając optymalną dokładność, niezawodność i wydajność we wszystkich środowiskach.
Obsługiwane konstelacje i częstotliwości:
▶ GPS: L1, L2, L5
▶ Galileo: E1, E5a, E5b, E5(a+b), E6
▶ BeiDou: B1I, B2I, B3I
▶ Glonass: G1, G2
▶ QZSS: L1, L2, L5
Obsługa wielu częstotliwości poprawia rozdzielczość niejednoznaczności, czas konwergencji i dokładność pozycjonowania. Poprawia również odporność w trudnych warunkach, takich jak kaniony miejskie, gęste lasy lub obszary o wysokiej aktywności jonosferycznej.
Tryby przetwarzania
Qinertia oferuje szeroki zakres trybów przetwarzania, które można dostosować do wszelkich ograniczeń operacyjnych:
▶ PPK z pojedynczą bazą
▶ PPK z pojedynczą bazą (tryb Ionoshield)
▶ PPK z VBS (wirtualną stacją bazową)
▶ PPK w czasie zbliżonym do rzeczywistego z korekcjami RTCM
▶ Ściśle sprzężone PPP (Precise Point Positioning) w dowolnym miejscu na świecie.
Funkcjonalności
Orbi AR – PPP ze stałą niejednoznacznością
Orbi AR w Qinertia precyzyjne pozycjonowanie punktowe (PPP) ze stałymi niejasnościami, zapewniając wysoką dokładność wyników bez konieczności stosowania lokalnej stacji bazowej. To innowacyjne podejście jest idealne do operacji w odległych lub trudnych środowiskach, gdzie sieci CORS są niedostępne lub wdrożenie osobistej stacji bazowej jest niepraktyczne.
Silnik geodezyjny
Silnik geodezyjny w Qinertia kompleksowy zestaw narzędzi, które są nie tylko niezwykle przyjazne dla użytkownika, ale także bardzo wszechstronne.
Dzięki szerokiemu wyborowi wstępnie skonfigurowanych układów odniesienia współrzędnych (CRS), Qinertia pozwala wykorzystać najważniejsze oficjalne systemy i transformacje dla Twoich projektów. Możesz również tworzyć niestandardowe transformacje dostosowane do Twoich konkretnych lub naukowych wymagań.
Wspomaganie wieloczujnikowe
Czujnik wspomagający w Qinertia wydajność kinematyczną po przetworzeniu poprzez inteligentną integrację zewnętrznych czujników ruchu i prędkości z przepływem pracy PPK. Oprócz precyzyjnego GNSS , Qinertia dane wejściowe DVL, licznika kilometrów, magnetometru, prędkości ogólnej i danych lotniczych, co pozwala zwiększyć dokładność pozycjonowania i ciągłość trajektorii nawet w trudnych warunkach, w których GNSS nie jest wystarczające.
Łącząc te źródła wspomagające podczas przetwarzania końcowego, Qinertia płynniejsze trajektorie, mniejsze odchylenia i bardziej niezawodne wyniki nawigacji w zastosowaniach lądowych, morskich i lotniczych.
PPK z RTCM na żywo
Możesz teraz osiągnąć niezrównaną dokładność w swoich przepływach pracy PPK, przetwarzając dane za pomocą poprawek RTCM, które są używane w operacjach w czasie rzeczywistym. Należy pamiętać, że ta funkcja jest zaprojektowana specjalnie dla scenariuszy z pojedynczą stacją bazową w czasie rzeczywistym i jest niekompatybilna z konfiguracjami VBS.
Strumień RTCM w Qinertia na nowo definiuje precyzję i zapewnia więcej opcji dla Twojego PPK.
Wygładzanie RTS
Zaawansowana opcja przetwarzania zaprojektowana w celu udoskonalenia trajektorii INS po kroku fuzji czujników. Stosując wygładzanie, Qinertia usuwa wszystkie ostre przejścia i nagłe skoki, zapewniając, że końcowe dane wyjściowe trajektorii są nie tylko dokładniejsze, ale także znacznie płynniejsze i bardziej ciągłe.



Zasięg stacji bazowych
Qinertia opiera się na sieci ponad 10 000 stacji bazowych w 164 krajach, aby poprawić dokładność GNSS. Przeglądaj stacje na stronie internetowej MySBG.
Więcej funkcjonalności
Poznaj transformacyjne podejście do przetwarzania danych GNSS dzięki oprogramowaniu Qinertia PPK firmy SBG Systems — jego zaawansowane funkcje są specjalnie zaprojektowane, aby wynieść Twoje operacje na nowy poziom!
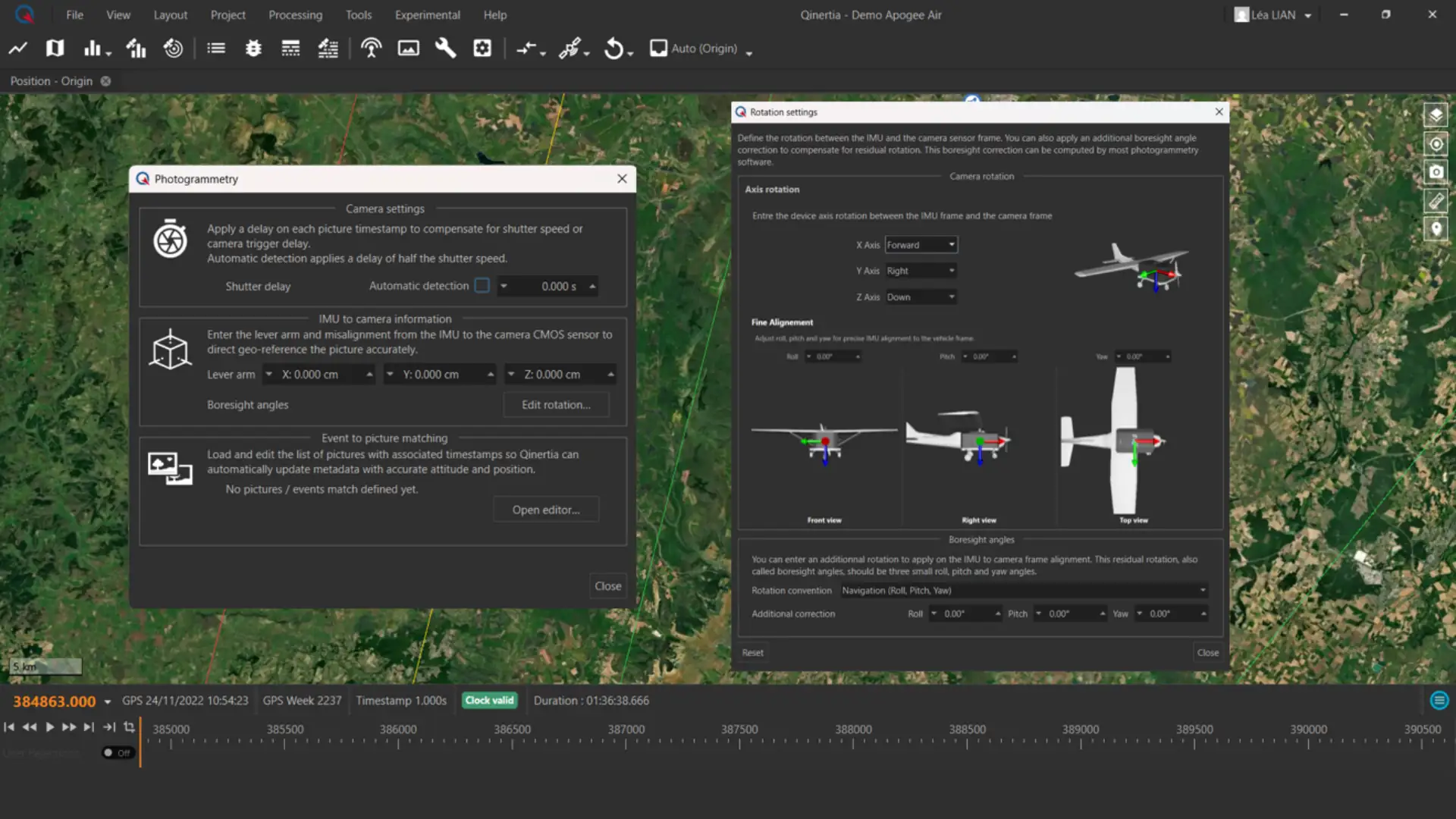
Zaawansowane bezpośrednie georeferencjonowanie
Qinertia wspiera precyzyjne bezpośrednie georeferencjonowanie i geotagowanie obrazów poprzez ścisłe połączenie IMU GNSS IMU . Wykorzystując dokładne dane dotyczące czasu i wyrównania czujników, moduł fotogrametrii dopasowuje wyzwalacze obrazów do trajektorii PPK i aktualizuje metadane obrazów z pozycjonowaniem na poziomie centymetra i pełną orientacją (przechył, pochylenie, odchylenie). Wbudowana obsługa parametrów ramienia dźwigni i wyrównania osi zapewnia bardzo dokładne dane dotyczące pozycji do wykorzystania w procesach rekonstrukcji 3D za pomocą oprogramowania takiego jak Pix4D, Metashape i UAS Master.

Ściśle sprzężone PPP
Tryb ten zapewnia centymetrową dokładność na całym świecie bez konieczności stosowania lokalnej stacji bazowej. Dzięki ścisłej integracji surowych GNSS z precyzyjnymi produktami satelitarnymi zapewnia niezawodne, wysokoprecyzyjne pozycjonowanie nawet w odległych obszarach, gdzie nie ma stacji referencyjnych. Idealny do globalnych pomiarów i trudnych warunków środowiskowych.

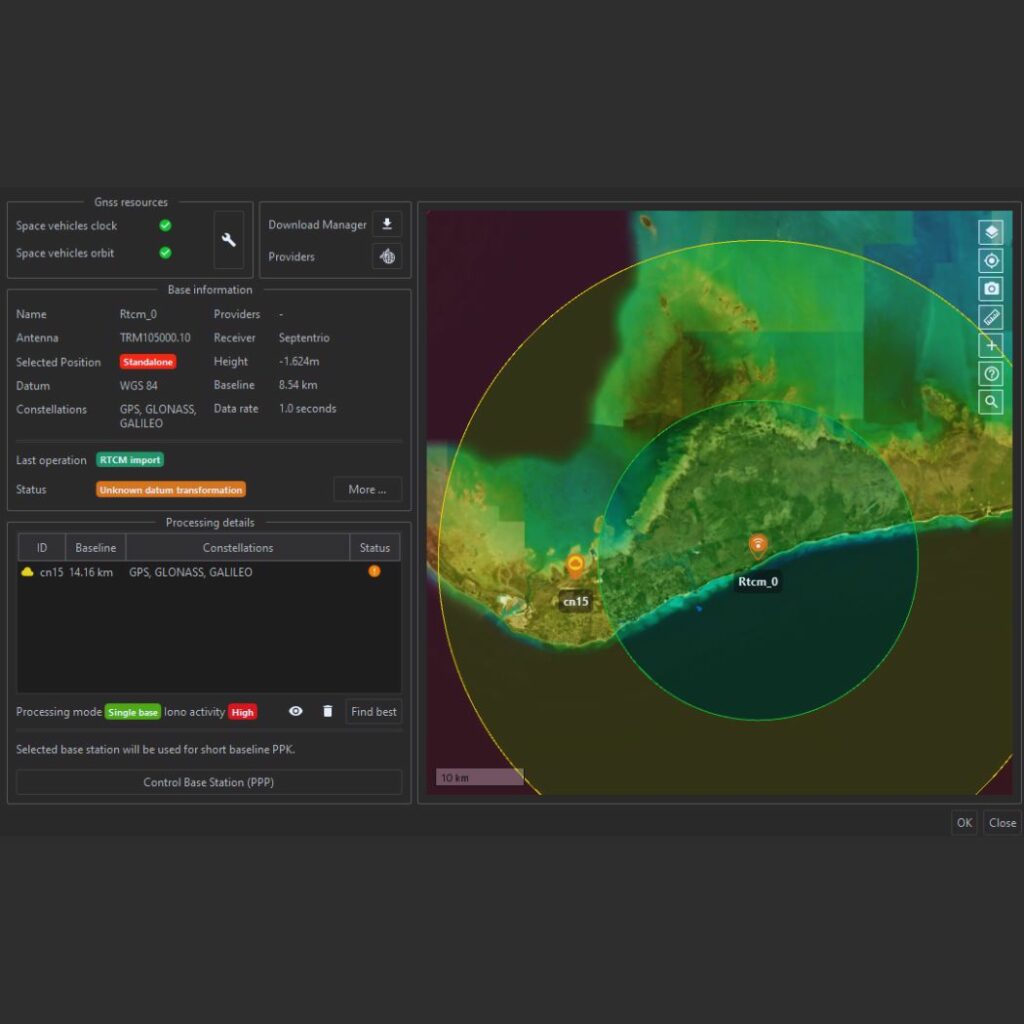
Zarządzanie stacjami bazowymi
Qinertia zapewnia użytkownikom bezpośredni dostęp do sieci do 10 000 stacji bazowych w 164 krajach, zapewniając precyzyjne możliwości post-processingu. Podczas importowania niestandardowej stacji bazowej, funkcja PPP base station control aktywnie weryfikuje jej współrzędne za pomocą technik precyzyjnego pozycjonowania punktowego, zwiększając dokładność i niezawodność.

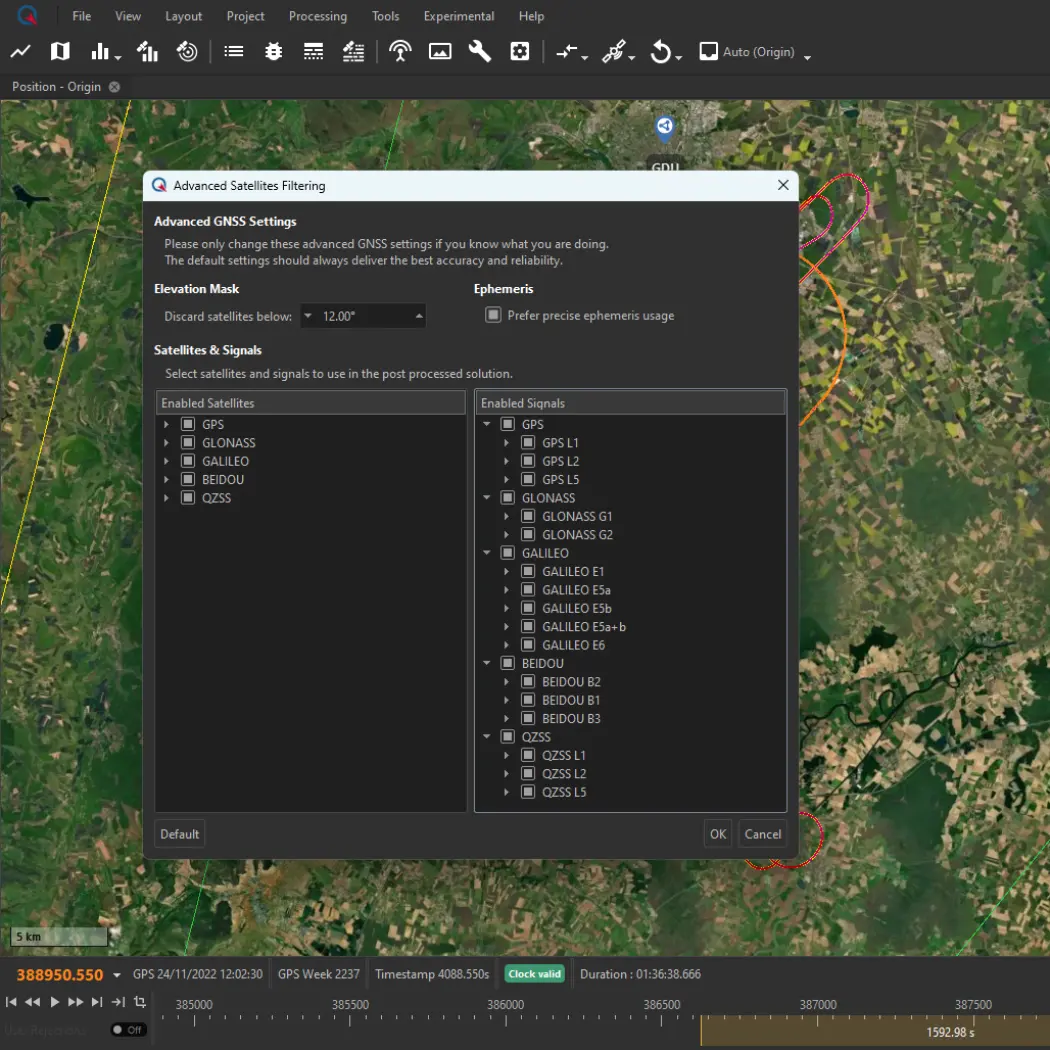
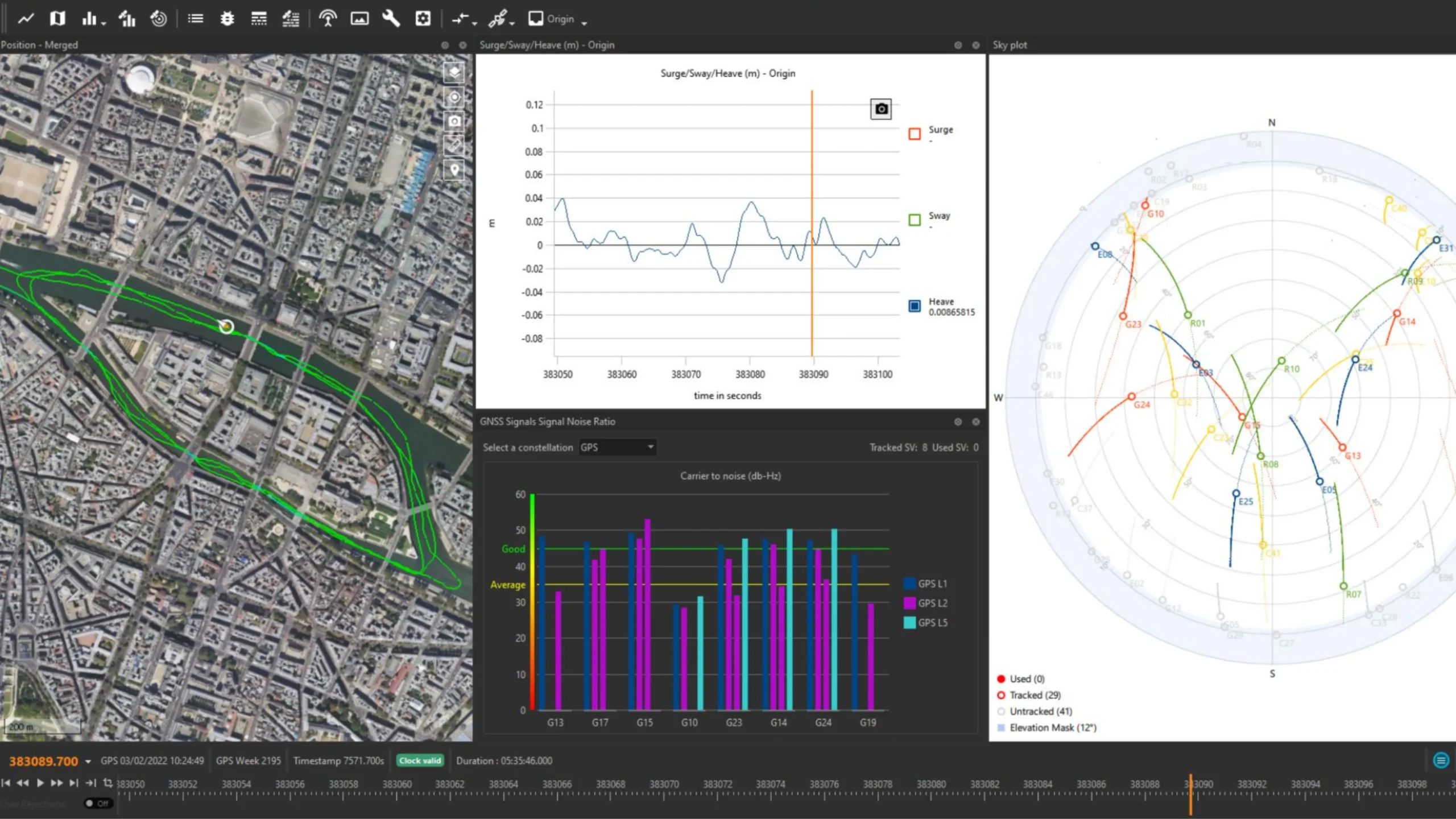
Zaawansowane ustawienia i wyświetlanie GNSS
Qinertia poprawia dokładność PPK poprzez inteligentne wykluczanie satelitów o słabej jakości sygnału, zapewniając, że w obliczeniach wykorzystywane są wyłącznie dane najwyższej jakości. Co więcej, użytkownicy mają teraz możliwość samodzielnego podejmowania decyzji poprzez ręczne wyłączanie poszczególnych satelitów, całych pasm sygnałowych, a nawet całych konstelacji w ramach swoich rozwiązań PPK. Aby wesprzeć te zaawansowane funkcje, wprowadziliśmy szereg informacyjnych wykresów, które pozwalają w łatwy sposób ocenić jakość GNSS . Zyskaj pełną kontrolę i pewność co do swoich GNSS dzięki zaawansowanym GNSS i wyświetlaczowi GNSS w Qinertia.
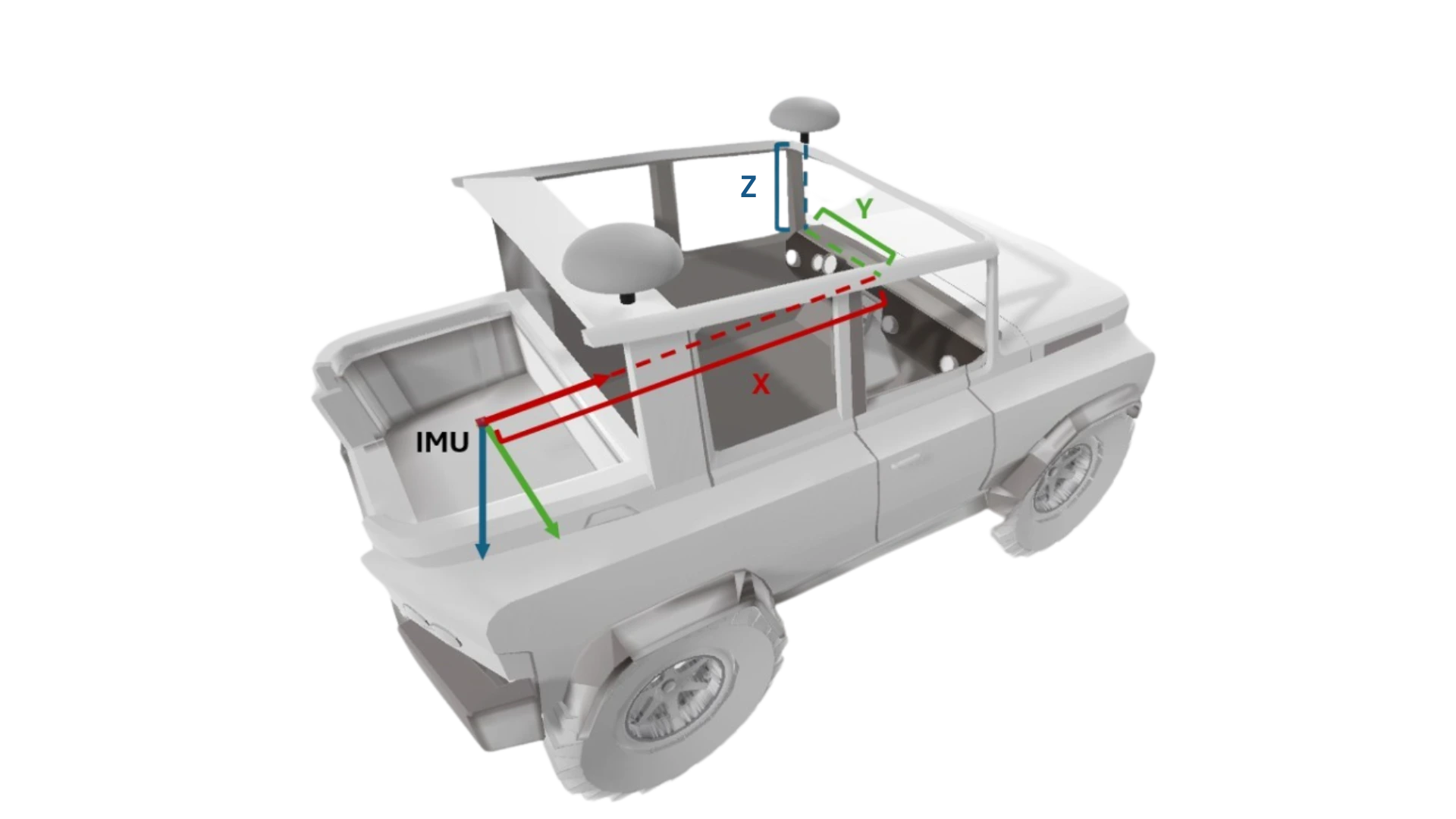
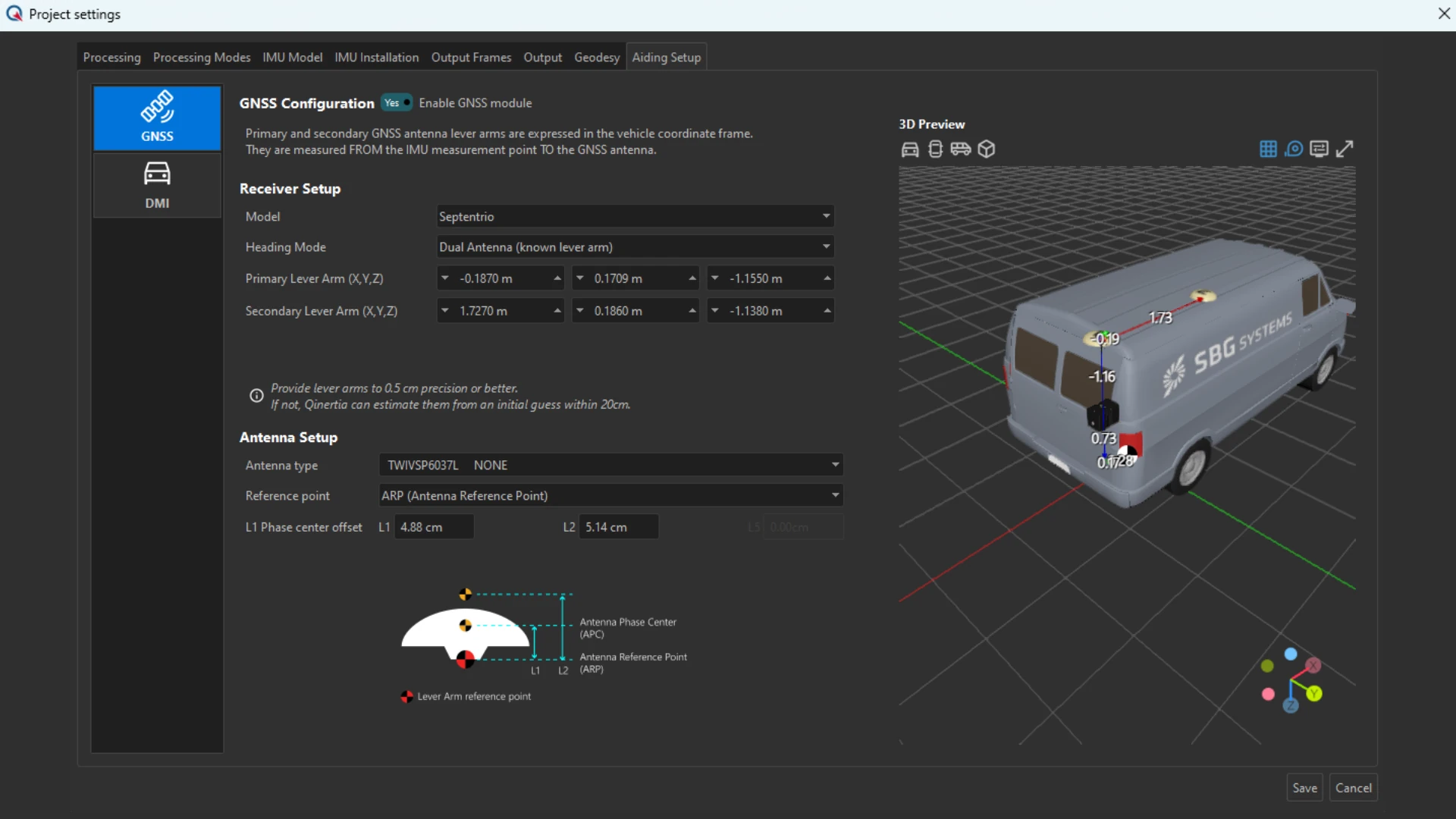
Estymacja ramienia dźwigni
Qinertia oferuje zaawansowane narzędzia do szacowania ramienia dźwigni, które pozwalają precyzyjnie określić fizyczne przesunięcia między GNSS a modułami IMU. Po wprowadzeniu przybliżonej wartości ramienia dźwigni zmierzonej ręcznie, Qinertia może automatycznie ją udoskonalić z dokładnością do centymetra, zapewniając optymalne ustawienie czujnika. Dowiedz się więcej o opcji szacowania ramienia dźwigni – uzyskaj dostęp już teraz!

Elastyczny układ i system przestrzeni roboczej
Popraw sposób interakcji z danymi i narzędziami.Qinertia zalecane układy dostosowane do konkretnych aplikacji, dzięki czemu możesz skupić się na analizie zamiast na konfiguracji interfejsu.
Możesz również tworzyć w pełni dostosowane do swoich potrzeb układy i udostępniać je zespołowi, zapewniając spójne i wydajne środowisko pracy. Takie elastyczne podejście do przestrzeni roboczej pomaga zespołom skuteczniej współpracować, pracować szybciej i utrzymać wydajność w różnych projektach i aplikacjach.
Widoki 3D
Widoki 3D pozwalają na wizualizację instalacji i konfiguracji w przejrzystym, intuicyjnym środowisku 3D. Położenie czujników, orientacja i geometria platformy są wyświetlane z dużą dokładnością, co pomaga zweryfikować konfigurację przed rozpoczęciem przetwarzania.
Ta wizualna informacja zapewnia prawidłowe umiejscowienie czujnika, ogranicza błędy konfiguracji i poprawia ogólną niezawodność projektu, zapewniając większą pewność zarówno w zakresiegromadzenia danych, jak i wyników przetwarzania końcowego.

Konfigurowalny eksport binarny trajektorii
Konfigurowalny eksport binarny trajektorii w Qinertia wprowadza lżejszy, szybszy i bardziej elastyczny sposób obsługi wyników PPK. Zaprojektowany z myślą o wydajności i interoperacyjności, znacznie zmniejsza rozmiar plików, zachowując pełną integralność trajektorii.
Dzięki szybszemu ładowaniu i zoptymalizowanej wymianie danych ten format eksportu umożliwia płynniejszy przepływ danych między maszynami, płynną integrację z dalszymi procesami przetwarzania oraz bardziej wydajną obsługę dużych projektów.
PPK ułatwione dla dokładnych wyników
Nasze oprogramowanie do post-processingu PPK oferuje bezproblemową obsługę dla wszystkich użytkowników dzięki intuicyjnemu interfejsowi i przewodnikom po przepływach pracy. Szybka konfiguracja projektu, wprowadzanie danych metodą „przeciągnij i upuść” oraz automatyczny wybór „najlepszej” stacji bazowej upraszczają zadania, a zaawansowane opcje są przeznaczone dla ekspertów. Regularne aktualizacje oparte na opiniach zapewniają ciągłe doskonalenie i funkcjonalność zorientowaną na użytkownika.

Tryby przetwarzania PPK
Tryby przetwarzania PPK w Qinertia obejmują: pojedynczą stację bazową o krótkiej linii bazowej dla lokalnej dokładności, tryb Ionoshield z pojedynczą stacją bazową w celu ograniczenia zakłóceń jonosferycznych dla lepszych wyników, wirtualną stację bazową dla eksperckiego mapowania korytarzy i poleganie na ściśle sprzężonym PPP dla spójnego pozycjonowania bez względu na to, dokąd zaprowadzi Cię podróż.
Oprogramowanie zorientowane na użytkownika
Qinertia nowoczesny, przyjazny dla użytkownika interfejs zaprojektowana szybkiej konfiguracji i wydajnej pracy. Jego zaawansowany zestaw narzędzi obsługuje precyzyjne funkcje przetwarzania końcowego, solidne modelowanie błędów i płynną integrację danych.
Regularne aktualizacje, oparte na opiniach użytkowników, stale poprawiają funkcjonalność, zapewniając optymalną wydajność i zgodność z ewoluującymi potrzebami branży.
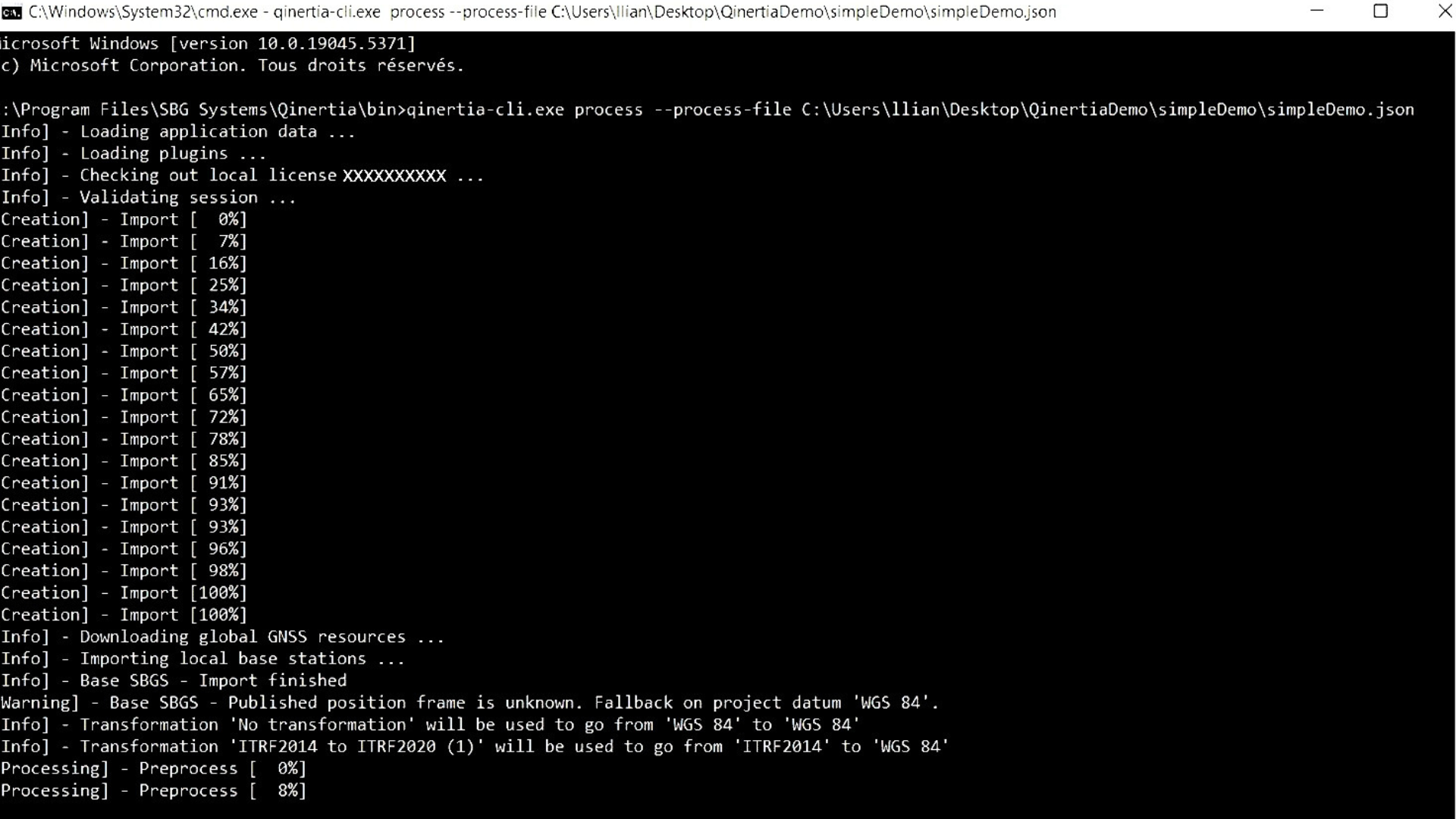
Łatwa integracja przepływu pracy
Twórcy oprogramowania mogą płynnie zintegrować zaawansowane funkcje PPK firmy Qinertia ze swoimi aplikacjami, korzystając z Qinertia Cloud lub interfejsu CLI Qinertia. Intuicyjny interfejs upraszcza interakcję, a interfejs wiersza poleceń (CLI) usprawnia przetwarzanie powtarzających się danych. Twórcy mogą dostosowywać formaty wyjściowe i generować szczegółowe raporty, zapewniając płynną integrację z istniejącymi procesami roboczymi.
Nasze różne edycje
Wybierz idealną edycję oprogramowania Qinertia PPK, dopasowaną do potrzeb Twojego projektu. Niezależnie od tego, czy pracujesz nad wielkoskalowymi pomiarami infrastruktury, mapowaniem o wysokiej precyzji, czy jakimkolwiek projektem wymagającym dokładnego post-processingu GNSS, Qinertia oferuje elastyczne opcje.
Każda edycja zapewnia zaawansowane funkcje do przetwarzania surowych danych GNSS i osiągnięcia dokładności na poziomie centymetrów za pomocą kilku kliknięć.
| Rodzaj przetwarzania | Rodzaj przetwarzania Tylko GNSS | Rodzaj przetwarzania Inercyjne + GNSS | Rodzaj przetwarzania Inercyjne + GNSS | Rodzaj przetwarzania Inercyjne + GNSS |
|---|---|---|---|---|
| Obsługiwane jednostki SBG IMU | Obsługiwane jednostki SBG IMU – | Obsługiwane jednostki SBG IMU Tylko Ellipse | Obsługiwane jednostki SBG IMU Serie Ellipse & Quanta (Quanta Micro/Plus/Extra) | Obsługiwane jednostki SBG IMU Wszystkie SBG & IMU innych firm |
| IMU innych firm | IMU innych firm – | IMU innych firm – | IMU innych firm – | IMU innych firm ● |
| Aplikacje | Aplikacje Wszystkie | Aplikacje Lądowe i Powietrzne | Aplikacje Powietrzne | Aplikacje Wszystkie |
| Licencja | Licencja Wieczysta lub Subskrypcja | Licencja Wieczysta lub Subskrypcja | Licencja Wieczysta lub Subskrypcja | Licencja Wieczysta lub Subskrypcja |
| Przetwarzanie równoczesne | Przetwarzanie równoczesne 1 | Przetwarzanie równoczesne 1 | Przetwarzanie równoczesne 1 | Przetwarzanie równoczesne 1 |
| Przetwarzanie offline | Przetwarzanie offline ● | Przetwarzanie offline ● | Przetwarzanie offline ● | Przetwarzanie offline ● |
| Przetwarzanie serwerowe | Przetwarzanie serwerowe – | Przetwarzanie serwerowe – | Przetwarzanie serwerowe – | Przetwarzanie serwerowe – |
| Interfejs | Interfejs GUI + CLI | Interfejs GUI + CLI | Interfejs GUI + CLI | Interfejs GUI + CLI |
| Profil ruchu | Profil ruchu Statyczny (GNSS), Powietrzny (UAV, samolot, helikopter), Lądowy (motoryzacja, ciężarówka, kolej), Morski (żegluga, trudne warunki pomiarów morskich i podwodne pomiary morskie), Pieszy | Profil ruchu Statyczny (GNSS), Powietrzny (UAV, Samolot, Helikopter), Lądowy (Motoryzacja, ciężarówka, kolej), Pieszy | Profil ruchu Statyczny (GNSS), Powietrzny (UAV, Samolot, Helikopter) | Profil ruchu Statyczny (GNSS), Powietrzny (UAV, samolot, helikopter), Lądowy (motoryzacja, ciężarówka, kolej), Morski (żegluga, trudne warunki pomiarów morskich i podwodne pomiary morskie), Pieszy |
| Ścisłe sprzężenie RTK, VBS i PPP | Ścisłe sprzężenie RTK, VBS i PPP – | Ścisłe sprzężenie RTK, VBS i PPP ● | Ścisłe sprzężenie RTK, VBS i PPP ● | Ścisłe sprzężenie RTK, VBS i PPP ● |
| Ponowne przetwarzanie | Ponowne przetwarzanie – | Ponowne przetwarzanie ● | Ponowne przetwarzanie ● | Ponowne przetwarzanie ● |
| Luźne sprzężenie | Luźne sprzężenie – | Luźne sprzężenie ● | Luźne sprzężenie ● | Luźne sprzężenie ● |
| GNSS RTK, VBS i PPP | GNSS RTK, VBS i PPP ● | GNSS RTK, VBS i PPP ● | GNSS RTK, VBS i PPP ● | GNSS RTK, VBS i PPP ● |
| Zarządzanie stacjami bazowymi | Zarządzanie stacją bazową ● | Zarządzanie stacją bazową ● | Zarządzanie stacją bazową ● | Zarządzanie stacją bazową ● |
| Silnik geodezyjny | Silnik geodezyjny ● | Silnik geodezyjny ● | Silnik geodezyjny ● | Silnik geodezyjny ● |
| IonoShield | IonoShield ● | IonoShield ● | IonoShield ● | IonoShield ● |
| Sieć CORS | Sieć CORS ● | Sieć CORS ● | Sieć CORS ● | Sieć CORS ● |
| Raport | Raport ● | Raport ● | Raport ● | Raport ● |
| Diagnostyka Rinex | Diagnostyka Rinex ● | Diagnostyka Rinex ● | Diagnostyka Rinex ● | Diagnostyka Rinex ● |
| Estymacja ramienia dźwigni | Estymacja ramienia dźwigni – | Estymacja ramienia dźwigni ● | Estymacja ramienia dźwigni ● | Estymacja ramienia dźwigni ● |
| Statystyki | Statystyki ● | Statystyki ● | Statystyki ● | Statystyki ● |




Stwórz własne rozwiązanie
Qinertia to oprogramowanie nowej generacji do post-processingu INS/GNSS, stworzone dla wszystkich użytkowników, niezależnie od tego, czy jesteś użytkownikiem indywidualnym, korporacyjnym, integratorem systemów, wydawcą oprogramowania, czy dostawcą usług.
Wstępnie skonfigurowane profile ruchu aplikacji upraszczają konfigurację i optymalizują wydajność dla Twoich konkretnych potrzeb.
Wybieraj spośród wszystkich dostępnych rozwiązań i dostosuj je do swoich potrzeb: wersja desktopowa, OEM i chmurowa.

Proste wdrożenia
Qinertia Desktop aplikacja komputerowa zaprojektowana efektywnego przetwarzania złożonych zbiorów danych poprzez zapewnienie zaawansowanych narzędzi analitycznych i konfigurowalnych ustawień.
Dzięki przyjaznemu interfejsowi, umożliwia szybki import, przetwarzanie i analizę danych.
Idealne rozwiązanie dla użytkowników indywidualnych lub zespołów pracujących w biurze.

Bezproblemowa integracja ze sprzętem lub oprogramowaniem
Qinertia OEM oferuje płynny proces integracji, umożliwiając wbudowanie zaawansowanego przetwarzania PPK w Twoje rozwiązania, oferując klientom niezawodne i wydajne pozycjonowanie o wysokiej precyzji, niezależnie od tego, czy jesteś producentem sprzętu, integratorem systemów, czy usługodawcą.
Możesz dostosować interfejs oprogramowania, przepływy pracy i funkcje, aby pasowały do Twojej marki i wymagań użytkowników.

Umożliwia elastyczne, skalowalne i zdalne zarządzanie.
Qinertia Cloud zaprojektowana programistów, integratorów i przedsiębiorstw poszukujących skalowalnego rozwiązania PPK, które zapewnia pełen potencjał precyzyjnego przetwarzania końcowego oraz wygodę i elastyczność technologii opartej na chmurze.
Niezależnie od tego, czy tworzysz niestandardową aplikację, oferujesz usługi online, czy rozszerzasz istniejące możliwości, Qinertia Cloud gwarantuje, że możesz zapewnić użytkownikom najwyższą wydajność PPK.
Kompatybilna z wieloma odbiornikami innych firm
Qinertia jest kompatybilna z odbiornikami innych firm, które mogą dostarczać surowe dane GNSS*, w tym: Septentrio, Trimble, Novatel, Ublox, Topcon, Javad, Ashtec, Spectra GNSS receivers…
Uzyskaj dostęp do wszystkich funkcji Qinertia: Parsowanie formatów plików odbiornika GNSS, GNSS PPK, opcjonalnie ze sprzężeniem inercyjnym, GNSS PPP, opcjonalnie ze sprzężeniem inercyjnym, Wszystkie wyświetlane wykresy i analizy, PPK wykonywane przy użyciu wszystkich dostępnych pasm konstelacji i wiele więcej…
*obsługiwane odbiorniki GNSS: dwupasmowe i wyższe (L1, L1+L2, L1+L5, L1+L2+L5).
Dokumentacja i zasoby
Wszystkie rozwiązania Qinertia są dostarczane z obszerną dokumentacją, zaprojektowaną, aby wspierać użytkowników na każdym kroku.
Od przewodników instalacji po zaawansowaną konfigurację i rozwiązywanie problemów, nasze jasne i szczegółowe instrukcje zapewniają płynną integrację i obsługę.
Przewodnik po Qinertia
Wyrusz w szczegółową podróż po naszym oprogramowaniu do post-processingu z Leą, naszym menedżerem produktu Qinertia.

Poproś o wersję demonstracyjną Qinertia
Poznaj rzeczywiste przypadki użycia
Dowiedz się, jak nasze oprogramowanie do post-processingu, Qinertia GNSS+INS, wspiera profesjonalistów w różnych branżach. Od precyzyjnego georeferowania w mapowaniu UAV po ulepszoną nawigację w trudnych warunkach, nasze studia przypadków pokazują, jak Qinertia zapewnia niezrównaną dokładność i wydajność.
Dowiedz się, jak nasi klienci wykorzystują Qinertia do pokonywania wyzwań, optymalizacji wydajności i osiągania wyjątkowych rezultatów.
Oprogramowanie Qinertia GNSS/INS PPK wybrane do geofizyki morskiej
Post-processing danych


Wykrywanie uszkodzeń szyn przez firmę TREALIS przy użyciuNavsight Apogee Navsight
Pozycjonowanie tramwajów i pociągów


Oni o nas mówią
Prezentujemy doświadczenia i referencje od profesjonalistów z branży i klientów, którzy wykorzystali nasze produkty inercyjne w swoich projektach.
Dowiedz się, jak nasza innowacyjna technologia zmieniła ich działalność, zwiększyła produktywność i zapewniła niezawodne wyniki w różnych zastosowaniach.
FAQ dotyczące oprogramowania do post-processingu
Nasza sekcja FAQ dotycząca oprogramowania do post-processingu zawiera wyczerpujące odpowiedzi na często zadawane pytania dotyczące zaawansowanych narzędzi do post-processingu firmy SBG Systems. W tej sekcji znajdziesz szczegółowe wyjaśnienia dotyczące funkcjonalności, integracji i korzyści płynących z naszych rozwiązań do post-processingu. Niezależnie od tego, czy potrzebujesz pomocy w optymalizacji przepływu pracy, zrozumieniu kompatybilności, czy rozwiązywaniu problemów, ten FAQ oferuje cenne informacje, które pomogą Ci zmaksymalizować wydajność naszego oprogramowania w Twoich projektach.
Poznaj odpowiedzi i zwiększ efektywność operacyjną dzięki niezawodnym rozwiązaniom do przetwarzania danych.
Które platformy obsługują Qinertia?
Qinertia Desktop dostępna jako aplikacja natywna dla systemów operacyjnych Windows i Linux. Jest zaprojektowana lokalnej instalacji i zapewnia pełny dostęp do funkcji przetwarzania końcowego i analizy Qinertia bezpośrednio na stacji roboczej użytkownika.
Qinertia Server dostępny dla określonych konfiguracji. Ta wersja jest zaprojektowana scentralizowanych lub zautomatyzowanych środowisk przetwarzania i zazwyczaj jest wdrażana na dedykowanej infrastrukturze. Dostępność i konfiguracja zależą od zamierzonego zastosowania, wymagań dotyczących wydajności i modelu licencjonowania.
Qinertia Cloud dostępna za pośrednictwem internetowego interfejsu API. Zamiast aplikacji desktopowej, umożliwia ona użytkownikom integrację możliwości przetwarzania Qinertia z własnymi systemami, przepływami pracy lub aplikacjami poprzez dostęp programowy. Opcja ta jest szczególnie odpowiednia dla przetwarzania zautomatyzowanego, infrastruktur opartych na chmurze oraz wdrożeń na dużą skalę lub zdalnych.
Co to jest post-processing GNSS?
Post-processing GNSS, czyli PPK, to podejście, w którym surowe pomiary danych GNSS rejestrowane na odbiorniku GNSS są przetwarzane po zakończeniu akwizycji danych. Można je łączyć z innymi źródłami pomiarów GNSS, aby zapewnić najbardziej kompletną i dokładną trajektorię kinematyczną dla danego odbiornika GNSS, nawet w najtrudniejszych warunkach.
Tymi innymi źródłami mogą być lokalne stacje bazowe GNSS znajdujące się w miejscu lub w pobliżu projektu akwizycji danych, lub istniejące stacje referencyjne działające w sposób ciągły (CORS), oferowane zazwyczaj przez agencje rządowe i/lub komercyjnych dostawców sieci CORS.
Oprogramowanie Post-Processing Kinematic (PPK) może wykorzystywać swobodnie dostępne informacje o orbitach i zegarach satelitów GNSS, aby pomóc w dalszej poprawie dokładności. PPK umożliwia precyzyjne określenie lokalizacji lokalnej stacji bazowej GNSS w ramach absolutnego globalnego układu odniesienia współrzędnych, który jest wykorzystywany.
Oprogramowanie PPK może również obsługiwać złożone transformacje między różnymi układami odniesienia współrzędnych w celu wsparcia projektów inżynieryjnych.
Innymi słowy, zapewnia dostęp do poprawek, zwiększa dokładność projektu, a nawet może naprawić utratę danych lub błędy podczas badania lub instalacji po zakończeniu misji.
Jaka jest różnica między RTK a PPK?
Real-Time Kinematic (RTK) to technika pozycjonowania, w której poprawki GNSS są przesyłane niemal w czasie rzeczywistym, zazwyczaj przy użyciu strumienia poprawek w formacie RTCM. Mogą jednak wystąpić trudności w zapewnieniu poprawek GNSS, w szczególności ich kompletności, dostępności, zasięgu i kompatybilności.
Główną zaletą PPK nad RTK post processing jest możliwość optymalizacji czynności przetwarzania danych podczas post-processingu, w tym przetwarzania w przód i w tył, podczas gdy w przetwarzaniu w czasie rzeczywistym każda przerwa lub niezgodność w poprawkach i ich transmisji prowadzi do niższego poziomu dokładności pozycjonowania.
Pierwszą kluczową zaletą post-processingu GNSS (PPK) w porównaniu z czasem rzeczywistym (RTK) jest to, że system używany w terenie nie musi mieć łącza danych/radia do przekazywania poprawek RTCM pochodzących z CORS do systemu INS/GNSS.
Głównym ograniczeniem we wdrażaniu post-processingu jest wymóg działania aplikacji końcowej w danym środowisku. Z drugiej strony, jeśli Twoja aplikacja może wytrzymać dodatkowy czas przetwarzania potrzebny do wygenerowania zoptymalizowanej trajektorii, znacznie poprawi to jakość danych dla wszystkich Twoich produktów.
Jak działa przetwarzanie w przód i w tył?
Wyobraźmy sobie, że mamy 60-sekundową przerwę w sygnale GNSS w środku naszego pomiaru. Błąd pozycji w przetwarzaniu w przód szybko rośnie (tempo zależy od specyfikacji IMU i innych parametrów) i osiąga maksimum na końcu przerwy. Następnie szybko się koryguje. W post-processingu udajemy, że czas płynie wstecz i przetwarzamy dane w porządku antychronologicznym, ponieważ równania fizyczne pozostają ważne. W tym przetwarzaniu wstecznym błąd byłby maksymalny na rzeczywistym początku przerwy w sygnale GNSS w sposób bardzo symetryczny do naturalnego przetwarzania w przód.
Połączenie tych dwóch wyników obliczeń daje maksymalny błąd w okolicach środka przerwy w dostawie sygnału, o znacznie mniejszej wartości niż w przypadku rozwiązań wykorzystujących tylko dane z przodu lub tylko z tyłu. Poprawi to szczególnie rozwiązania GNSS+INS oferowane przez SBG Systems, ale przetwarzanie danych tylko z GNSS również skorzysta z tego procesu.
Jak już wspomniano, poprawę tę można uzyskać tylko poprzez post-processing, ponieważ wszystkie dane muszą być dostępne od początku do końca, co opóźnia jego użycie do końca pomiaru.
Co to jest georeferencja w lotniczych pomiarach geodezyjnych?
Georeferencja to proces dopasowywania danych geograficznych (takich jak mapy, zdjęcia satelitarne lub zdjęcia lotnicze) do znanego układu współrzędnych, tak aby można je było dokładnie umieścić na powierzchni Ziemi.
Umożliwia to integrację danych z innymi informacjami przestrzennymi, umożliwiając precyzyjną analizę i mapowanie oparte na lokalizacji.
W kontekście pomiarów geodezyjnych, georeferencja jest niezbędna do zapewnienia, że dane zebrane przez narzędzia takie jak LiDAR, kamery lub czujniki na dronach są dokładnie odwzorowywane we współrzędnych świata rzeczywistego.
Poprzez przypisanie szerokości geograficznej, długości geograficznej i wysokości do każdego punktu danych, georeferencja zapewnia, że zebrane dane odzwierciedlają dokładną lokalizację i orientację na Ziemi, co jest kluczowe dla zastosowań takich jak geoprzestrzenne mapowanie, monitorowanie środowiska i planowanie budowy.
Georeferencja zazwyczaj obejmuje wykorzystanie punktów kontrolnych o znanych współrzędnych, często uzyskiwanych za pomocą GNSS lub naziemnych pomiarów geodezyjnych, w celu dopasowania zebranych danych do układu współrzędnych.
Proces ten jest niezbędny do tworzenia dokładnych, wiarygodnych i użytecznych zbiorów danych przestrzennych.
