

Stellar-40 Sistema de navegación inercial de grado táctico
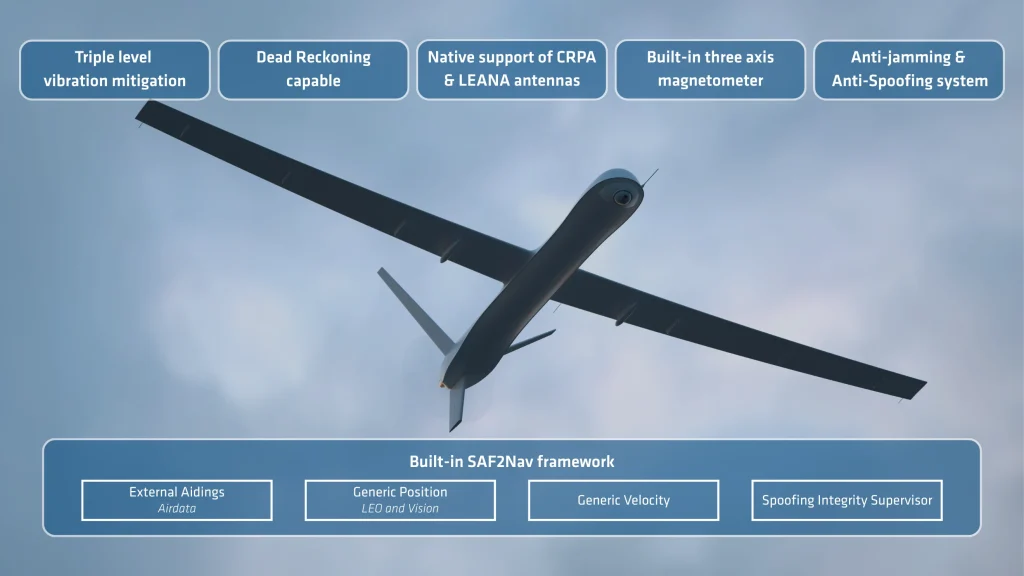
Stellar es un sistema de navegación inercial GNSS de grado táctico que funciona con la plataforma SAF2Nav, lo que le confiere una resistencia sin igual. Combina una IMU de grado táctico, un GNSS resistente al bloqueo y a la suplantación de identidad, y algoritmos avanzados de fusión de sensores, todo ello dentro de una carcasa resistente.
Combinando un rendimiento de alta gama con flexibilidad industrial, Stellar cuenta con una arquitectura única de mitigación de vibraciones de triple capa en un diseño optimizado para la escalabilidad, que cumple con las rigurosas exigencias de la producción en serie.
Con este lanzamiento, SBG Systems amplía SBG Systems su cartera de soluciones de navegación inercial diseñadas para aplicaciones de misión crítica. Stellar no está sujeto a la normativa ITAR.
Stellar-40
Nuestro Stellar es el primero de una nueva Stellar lanzada para satisfacer los requisitos operativos en constante evolución. Este INS de grado táctico INS en dos objetivos principales: aumentar la resiliencia en condiciones operativas adversas y garantizar la escalabilidad, sin comprometer el rendimiento.
Para hacer frente a los retos que plantean las altas vibraciones, SBG Systems creado una obra maestra de la ingeniería mecánica: un exclusivo sistema de protección contra vibraciones de triple capa. Se llevó a cabo un análisis modal completo para garantizar que el producto sea robusto y fiable, al tiempo que se mantiene un diseño notablemente sencillo.
Listo para la navegación por estima con el motor SAF2Nav como núcleo, Stellar se integra a la perfección en su plataforma para ofrecer una navegación resistente, incluso en las condiciones más adversas GNSS.
¡Explore todas las funciones!




Stellar-40 de un vistazo
Robusto. Preciso. Sin fisuras.
Explore las características clave a continuación para obtener más información sobre Stellar-40.
Obra maestra de la ingeniería mecánica
La vibración es el enemigo de la precisión, por lo que nuestro INS un sistema de mitigación de vibraciones de triple nivel. Nuestro exclusivo diseño mecánico aísla los sensores a través de tres etapas distintas para garantizar la máxima precisión. La primera etapa consiste en la amortiguación IMU, que proporciona amortiguación interna directamente a nivel del sensor. La segunda etapa utiliza un diseño de carcasa optimizado, con un recinto desarrollado mediante análisis modal para eliminar la resonancia y reducir las vibraciones inducidas por el propio recinto. Por último, la tercera etapa emplea el aislamiento externo mediante amortiguadores externos para separar mecánicamente la unidad de la estructura del vehículo.
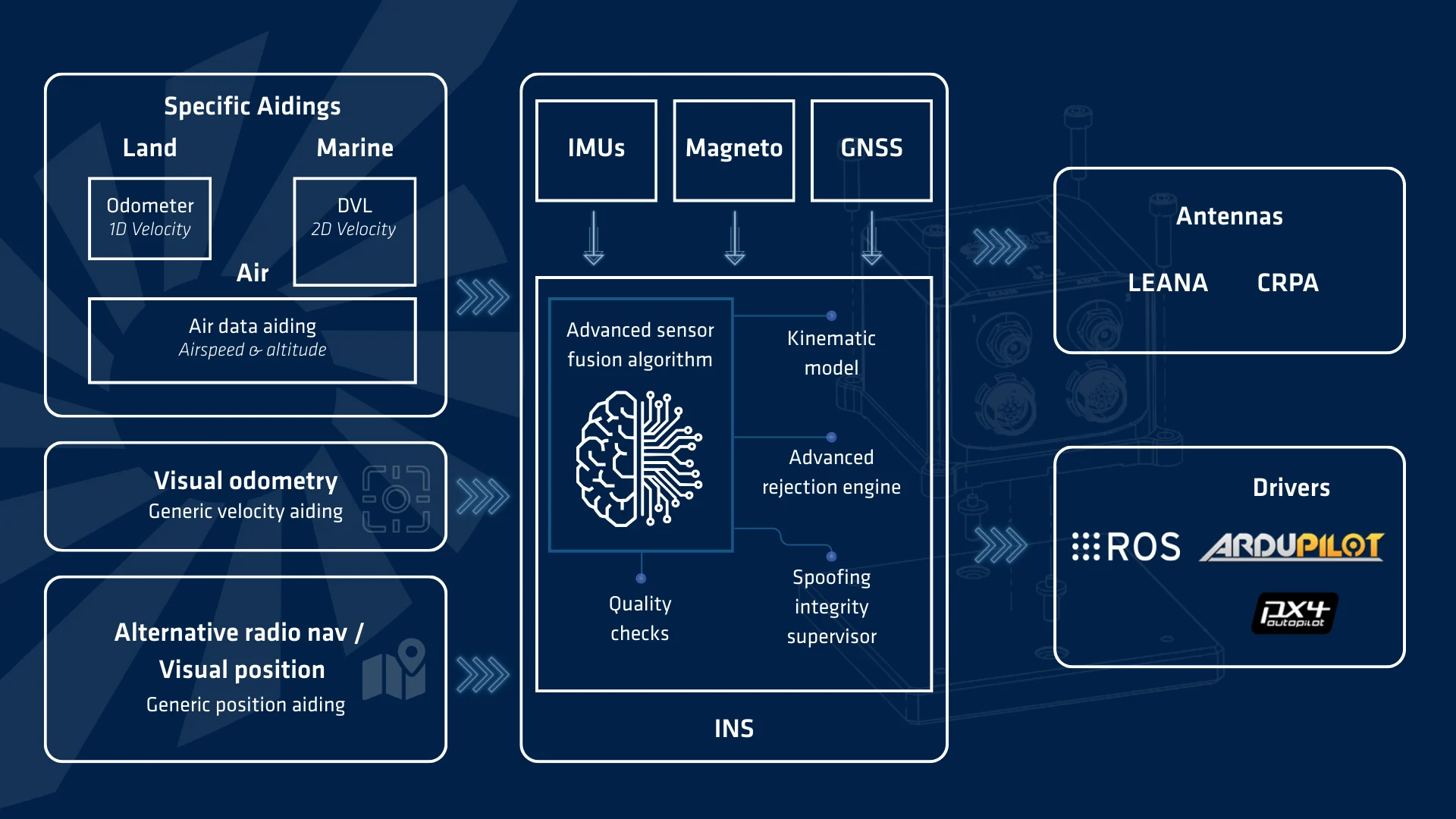
Pila de navegación resistente con SAF2Nav
GNSS ya no GNSS da por sentado. Por eso nuestra pila SAF2Nav es el núcleo de nuestro INS, lo que garantiza la precisión y la seguridad cuando GNSS o es atacado. Se basa en tres pilares fundamentales. En primer lugar, la fusión multisensor combina datos GNSS, IMU, aire, radar y visión en una única solución de navegación coherente. En segundo lugar, un nuevo supervisor de integridad contra el spoofing supervisa los sensores para detectar anomalías al instante, lo que reduce drásticamente el tiempo crítico de alerta. Por último, los modelos cinemáticos adaptativos maximizan la precisión de la navegación, lo que permite al algoritmo de fusión adaptarse perfectamente a la dinámica de movimiento específica de su plataforma.
Herramienta integrada de monitorización de vibraciones
El monitoreo de vibraciones para comprender y mitigar las resonancias estructurales rara vez es sencillo y a menudo requiere hardware externo dedicado. Por eso, integramos herramientas de monitoreo completas directamente en el INS Stellar-40. El sistema cuenta con un acelerómetro dedicado de alto ancho de banda que opera hasta 16 kHz, junto con capacidades avanzadas de procesamiento a bordo. Proporciona visualización en tiempo real de RMS, magnitud pico y frecuencia pico en cuatro bandas de frecuencia distintas, lo que permite a los usuarios identificar exactamente dónde ocurren las vibraciones críticas. Además, estos valiosos datos se registran sin problemas y se reutilizan para un análisis FFT en profundidad posterior.

Compatibilidad con el ecosistema
Un sistema de navegación potente solo es bueno si se integra perfectamente en su arquitectura. Por eso, la compatibilidad con el ecosistema es un pilar fundamental de nuestro INS, diseñado para acelerar la implementación y eliminar los gastos generales de integración. En primer lugar, el sistema está totalmente equipado con controladores listos para usar que ofrecen compatibilidad nativa con plataformas autónomas estándar del sector, como ROS2, ArduPilot y PX4. En segundo lugar, para garantizar la máxima resistencia en entornos conflictivos, ofrece compatibilidad plug-and-play directa con antenas CRPA avanzadas. Esta profunda interoperabilidad garantiza una implementación sin esfuerzo en todas sus plataformas críticas.
Resumen de las capacidades y el rendimiento de las misiones
Diseñado para todo tipo de misiones
Descubra el rendimiento del producto en distintos entornos operativos. En cada ámbito se destacan las ventajas relevantes para la misión y las especificaciones clave.
Rendimiento de las misiones aéreas
- Navegación de vehículos aéreos no tripulados: plataformas de ala fija y de ala giratoria
- Navegación de vehículos aéreos no tripulados: plataformas de ala fija y de ala giratoria
Desglose de las características de la misión
Diseñado para misiones aéreas exigentes, el sistema combina robustez, precisión y una integración perfecta en plataformas de ala fija y de ala giratoria.
- Perfiles dinámicos específicos adaptados a plataformas de ala fija y de ala giratoria.
- Aislamiento antivibratorio de triple capa para entornos con un alto nivel de vibraciones transmitidas por el aire.
- Integridad del posicionamiento ante GNSS y suplantación GNSS , gracias a la pila SAF2Nav.
- Navegación estimada táctica basada en la plataforma SAF2Nav para garantizar una navegación ininterrumpida durante GNSS .
- Estimación automática de la velocidad del viento y compensación para la integración del tubo de Pitot.
- Integración perfecta del piloto automático, gracias a nuestros controladores PX4 y ArduPilot.
Rendimiento de las misiones terrestres
- Navegación terrestre: vehículos de carretera y todoterreno
- Navegación terrestre: vehículos de carretera y todoterreno
Desglose de las características de la misión
Diseñado para misiones terrestres exigentes, el sistema combina robustez, precisión y una integración perfecta en cualquier tipo de vehículo terrestre.
- Perfiles dinámicos específicos diseñados para vehículos todoterreno o de carretera.
- Aislamiento antivibratorio de triple capa para entornos con altas vibraciones.
- Integridad del posicionamiento ante GNSS y suplantación GNSS , gracias a la pila SAF2Nav.
- Entradas de odómetro de rueda y velocidad de impacto para mejorar el rendimiento de la navegación por estima
- Navegación estimada táctica basada en la plataforma SAF2Nav para garantizar una navegación ininterrumpida durante GNSS .
Rendimiento de la navegación en superficie
- Navegación marítima: embarcaciones de superficie tripuladas y no tripuladas de cualquier tamaño
- Navegación marítima: embarcaciones de superficie tripuladas y no tripuladas de cualquier tamaño
Desglose de las características de la misión
Diseñado para misiones marítimas exigentes, el sistema combina robustez, precisión y una integración perfecta en cualquier tipo de buque de superficie.
- Perfiles dinámicos específicos diseñados para vehículos marinos de superficie.
- Aislamiento antivibratorio de triple capa para entornos con altas vibraciones.
- Integridad del posicionamiento ante GNSS y suplantación GNSS , gracias a la pila SAF2Nav.
- Entradas de velocidad del DVL o del loch para mejorar el rendimiento de la navegación por estima
- Estimación automática de la velocidad actual y compensación de la velocidad en la pista de agua.
- Navegación estimada táctica basada en la plataforma SAF2Nav para garantizar una navegación ininterrumpida durante GNSS .
Especificaciones
Compatibilidad con vehículos
Embarcaciones de superficie, vehículos submarinos, estudios marinos, entornos marinos y marinos hostiles Aire
Aviones, helicópteros, aeronaves, UAV Terrestre
Coche, automoción, tren/ferrocarril, camión, vehículos de dos ruedas, maquinaria pesada, peatón, mochila, off road
Rendimiento del GNSS
Antena doble, 789 canales GNSS
500 m/s y 80 km de altitud Banda de frecuencia
Multifrecuencia Características del GNSS
SBAS, RTK, PPK, RAW Señales GPS
L1C/A, L1C, L2C, L2PY, L5 Señales de Galileo
E1, E5a, E5b, E6BC Señales de Glonass
L1C/A, L2C/A, L2P, L3OC Señales de Beidou
B1I, B1C, B2a, B2I, B3I, B2b Otras señales
NaviC L5, banda L, QZSS Tiempo de GNSS para la primera fijación
< 35 s Inhibición y suplantación
Antiencadenamiento y antisuplantación automáticos, OSNMA, rechazo automático avanzado de múltiples sensores.
Especificaciones ambientales y rango de operación
IP-65 Temperatura de funcionamiento
-40 °C a 71 °C Vibraciones
3 g RMS – 20Hz a 2kHz Choques
500 g para 0,3 ms MTBF (calculado)
246 000 horas Cumple con
MIL-STD 461G | MIL-STD 1275E | MIL-STD 810H
Interfaces
GNSS, RTCM, NTRIP, datos de vuelo, cuentakilómetros, velocidad y posición genéricas Protocolos de salida
NMEA, ASCII, sbgECom (binario), REST API Protocolos de entrada
NMEA, ASCII, sbgECom (binario), REST API Datalogger
8 GB o 48 h @ 200 Hz Tasa de salida
200 Hz (IMU, INS) Puertos serie
4 puertos serie de E/S con velocidades de hasta 921 600 bps CAN
1x bus CAN 2.0 A/B, hasta 1 Mbps Sync OUT
2 salidas de sincronización (1x RS232 + 1x niveles TTL) Sync IN
4 entradas de sincronización (niveles RS232) Ethernet
1x Ethernet Full Duplex (10/100 Base T) PTP/NTP, NTRIP, interfaz web, FTP Conectores
2x Micro 15 (E/S) 2x conectores SMA (antenas)
Especificaciones mecánicas y eléctricas
9 a 36 VDC Consumo de energía
< 3 W without antennas Peso (g)
365 g / 443 g con amortiguador Dimensiones (LxAxA)
81 mm x 130 mm x 40 mm
Especificaciones de temporización
< 200 ns Precisión PTP
< 1 µs Precisión PPS
< 1 µs (jitter < 1 µs) Deriva en navegación a estima
1 ppm
Ficha técnica de Stellar-40
¡Reciba todas las características y especificaciones del producto directamente en su bandeja de entrada!
Compare Stellar-40 con otros productos
Anímese y compare nuestra gama de sensores inerciales más avanzada para la navegación, el movimiento y la detección de oleaje. Las especificaciones completas se pueden encontrar en el Manual de Hardware disponible bajo petición.

Stellar-40 |
||||
|---|---|---|---|---|
| Posición horizontal de un solo punto | Posición horizontal de punto único 1.2 m | Posición horizontal de punto único 1.2 m | Posición horizontal de punto único 1.0 m | Posición horizontal de punto único 1.2 m |
| Evaluación del rendimiento de la suplantación de identidad y la interferencia | Valoración del rendimiento en cuanto a suplantación y interferencia ★★★★★ | Valoración del rendimiento en cuanto a suplantación y interferencia ★★★☆☆ | Valoración del rendimiento en cuanto a suplantación y interferencia ★★★☆☆ | Valoración del rendimiento en cuanto a suplantación y interferencia ★★★☆☆ |
| Resistencia al spoofing y al jamming | Resistencia al spoofing y al jamming Todas las constelaciones, banda completa, supervisión avanzada y mitigación | Resistencia al spoofing y al jamming Todas las constelaciones, doble banda, supervisión y mitigación | Resistencia al spoofing y al jamming Todas las constelaciones, triple banda, supervisión y mitigación avanzadas | Resistencia al spoofing y al jamming Todas las constelaciones, doble banda, supervisión y mitigación |
| Resistencia a las vibraciones | Resistencia a las vibraciones Triple nivel | Resistencia a las vibraciones Un nivel | Resistencia a las vibraciones Un nivel | Resistencia a las vibraciones Un nivel |
| Navegación a estima | Navegación a estima Precisión de hasta el 0,2 % (vehículo de carretera, GNSS de doble antena GNSS cuentakilómetros) | Navegación a estima Precisión de hasta el 0,2 % (vehículo de carretera, GNSS de doble antena GNSS cuentakilómetros) | Dead reackoning < 0.1 % DT (Onroad vehicle, dual antenna GNSS and odometer) | Navegación por estima Precisión de hasta el 0,5 % (vehículo de carretera, GNSS de doble antena GNSS cuentakilómetros) |
| Peso (g) | Peso (g) 365 g | Peso (g) 165 g | Weight (g) < 900 g | Peso (g) 65 g |
| Dimensiones (LxAxA) | Dimensiones (L x An x Al) 81 x 130 x 40 mm | Dimensiones (LxAxA) 42 x 57 x 60 mm | Dimensiones (LxAxA) 130 x 100 x 75 mm | Dimensiones (LxAxA) 46 x 45 x 32 mm |



Compatibilidad
Una selección compatible de antenas anti-interferencias y anti-suplantación.
Hemos seleccionado una gama óptima de antenas antiinterferencias y antisuplantación, totalmente probadas y validadas para garantizar su compatibilidad. Esta gama incluye tecnologías probadas como CRPA (antena con patrón de recepción controlado) y LEANA (antena de navegación antiinterferencias de baja elevación).
¡Descubra nuestras soluciones recomendadas!







Documentación y recursos
Stellar-40 incluye una documentación en línea completa, diseñada para apoyar a los usuarios en cada paso.
Desde las guías de instalación hasta la configuración avanzada y la resolución de problemas, nuestros manuales claros y detallados garantizan una integración y un funcionamiento sin problemas.
Nuestros casos prácticos
Explore casos de uso reales que demuestran cómo nuestras soluciones mejoran el rendimiento, reducen el tiempo de inactividad y aumentan la eficiencia operativa. Descubra cómo nuestros sensores avanzados e interfaces intuitivas proporcionan la precisión y el control que necesita para sobresalir en sus aplicaciones.






Productos y accesorios adicionales
Descubra cómo nuestras soluciones pueden transformar sus operaciones explorando nuestra diversa gama de aplicaciones. Con nuestros sensores y software de movimiento y navegación, obtiene acceso a tecnologías de última generación que impulsan el éxito y la innovación en su campo.
Únase a nosotros para desbloquear el potencial de las soluciones de navegación inercial y posicionamiento en diversos sectores.
Qinertia GNSS-INS

Cables

Antenas GNSS
Proceso de producción
Descubra la precisión y la experiencia que hay detrás de cada producto de SBG Systems, como una IMU, un AHRS o un INS. El siguiente vídeo ofrece una visión interna de cómo diseñamos, fabricamos y probamos meticulosamente nuestros sistemas de navegación inercial de alto rendimiento. Desde la ingeniería avanzada hasta el riguroso control de calidad, nuestro proceso de producción garantiza que cada producto cumpla con los más altos estándares de fiabilidad y precisión.
¡Véalo ahora para obtener más información!

Solicitar un presupuesto
Hablan de nosotros
Presentamos las experiencias y testimonios de profesionales del sector y clientes que han aprovechado nuestros productos en sus proyectos.
Sus opiniones reflejan la calidad y el rendimiento que definen nuestro INS, y destacan su papel como solución de confianza en el sector.
Descubra cómo nuestra innovadora tecnología ha transformado sus operaciones, mejorado la productividad y ofrecido resultados fiables en diversas aplicaciones.
Sección de preguntas frecuentes
Bienvenido a nuestra sección de preguntas frecuentes, donde respondemos a sus preguntas más apremiantes sobre nuestra tecnología de vanguardia y sus aplicaciones. Aquí encontrará respuestas completas sobre las características del producto, los procesos de instalación, consejos para la resolución de problemas y las mejores prácticas para maximizar su experiencia con nuestro INS compacto. Tanto si es un nuevo usuario que busca orientación como si es un profesional experimentado que busca información avanzada, nuestras preguntas frecuentes están diseñadas para proporcionarle la información que necesita.
¡Encuentre sus respuestas aquí!
¿Qué es la navegación por estima en navegación?
La navegación por estima es un método de navegación sin GNSS que se basa en la inercia y otros datos de sensores para mantener un seguimiento continuo. Por lo general, cuando GNSS pierde GNSS , el sistema pierde por completo su posición. Con la navegación por estima, el sistema calcula una posición continua que se desviará lentamente con el tiempo. La velocidad de esta desviación depende de la calidad de la IMU interna IMU de la disponibilidad de sensores externos auxiliares.
¿Qué formatos admite para ayudas externas (por ejemplo, datos aéreos, visión)?
El Stellar-40 utiliza nuestro protocolo propietario sbgECom, que emplea tramas de mensajes claramente definidas. Utilizando esos mensajes predefinidos, el sistema puede ingerir sin problemas datos aerodinámicos (airdata), velocidades del cuerpo y datos de posición absoluta de cualquier sensor externo capaz de proporcionar dicha información.
¿Hay algún campo específico para introducir manualmente la estimación del viento?
No, ya que no es necesario. El algoritmo avanzado de fusión de sensores del Stellar-40 calcula y estima automáticamente las condiciones del viento en tiempo real, eliminando la necesidad de introducirlas manualmente.
¿Qué opciones de ayuda externa hay disponibles para aplicaciones terrestres?
Para plataformas terrestres, el Stellar-40 admite una variedad de entradas de asistencia para mejorar la precisión de la navegación, especialmente en entornos con denegación de GNSS. Estas incluyen odómetros de hardware (odometría de rueda), asistencias de velocidad de sensores externos (como LiDAR o sensores ópticos) y asistencias de posición absoluta.
¿Cómo elijo entre las versiones amortiguada y no amortiguada del Stellar-40?
La elección correcta depende de su entorno operativo. Recomendamos encarecidamente la versión amortiguada para plataformas expuestas a entornos hostiles y con vibraciones, como drones de ataque profundo o vehículos terrestres no tripulados (UGV). Si no está seguro de qué versión se adapta mejor a su aplicación, nuestro equipo de asistencia está a su disposición para ayudarle a tomar la decisión correcta.
