Ellipse-D impulsando un camión autónomo
Camión autónomo con sistema independiente de dirección y tracción en las ruedas.
“El Ellipse-D de SBG Systems fue fácil de usar, muy preciso y estable, con un formato pequeño, todo lo cual fue esencial para el desarrollo de nuestro WATonoTruck.” | Amir K., Profesor y Director, Universidad de Waterloo

Todos sabemos que los accidentes en la carretera se producen debido a errores del conductor, condiciones climáticas adversas o fallos del vehículo. Pero, ¿y si pudiéramos hacer que los vehículos se condujeran solos, evitando estos accidentes? Por ejemplo, un camión autónomo o un coche autónomo.
Esa es la idea detrás de los vehículos autónomos, y el Laboratorio de Sistemas de Vehículos Mecatrónicos (MVS) de la Universidad de Waterloo está trabajando en un proyecto llamado WATonoTruck (WATerloo atonomous Truck).
Es un camión de plataforma autónomo diseñado para la manipulación de materiales pesados, la agricultura y aplicaciones de servicio. Utiliza métodos de control avanzados para analizar los movimientos del camión, especialmente en condiciones peligrosas o escenarios de mal funcionamiento, garantizando la seguridad y la eficiencia.
El laboratorio pretende ampliar la aplicación de la tecnología de vehículos autónomos más allá del transporte de pasajeros. Quieren utilizarla en otras industrias como la agricultura, la minería y el transporte marítimo, aumentando así la eficiencia y reduciendo el tiempo de inactividad operativa.
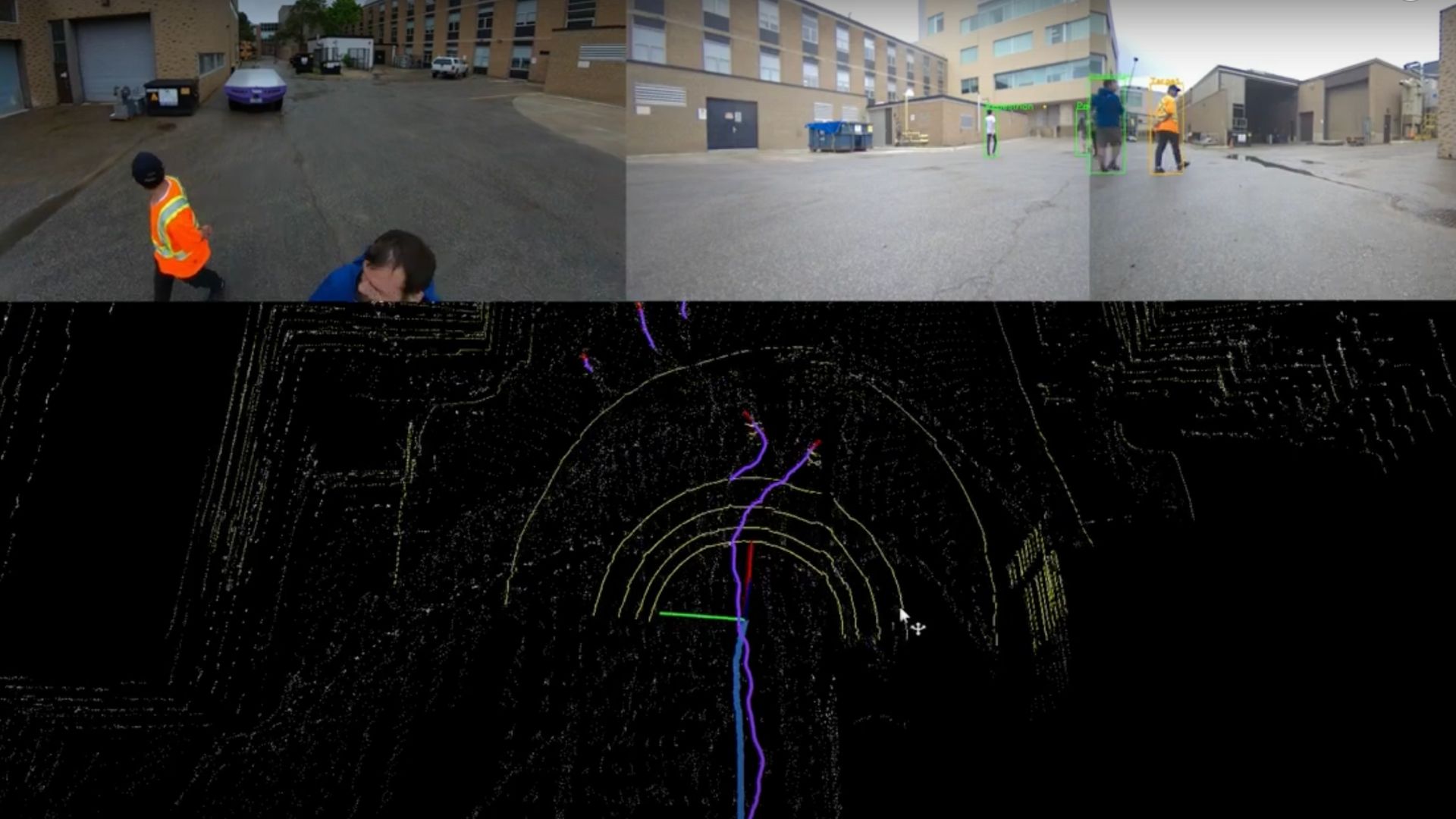
Conozca WATonoTruck
Un camión que no necesita conductor: ¡eso es WATonoTruck! Es un camión de plataforma autónomo con sistema independiente de dirección y tracción en las ruedas. Está construido sobre la plataforma de módulo de esquina (CM, por sus siglas en inglés).
Los CM se desarrollaron teniendo en cuenta el diseño modular de vehículos y se pueden instalar en cualquier chasis en cualquier configuración.
Cada CM funciona como un vehículo eléctrico de una sola rueda equipado con su propia unidad de control. Permite operar de forma independiente con sistemas de tracción, freno, dirección y suspensión.
Esto hace que el camión sea súper inteligente y adaptable a cualquier aplicación y terreno.
WATonoTruck impulsado por Ellipse-D
Como líder en soluciones de posicionamiento y navegación de alta precisión, estamos orgullosos de colaborar con el Laboratorio de Sistemas de Vehículos Mecatrónicos de la Universidad de Waterloo.
Proporcionamos el Ellipse-D, un INS RTK de doble antena, que ofrece una precisión inigualable en posición y rumbo.
Este nivel de precisión es crucial para la navegación autónoma, garantizando el movimiento seguro y preciso del WATonoTruck incluso en entornos difíciles.

Ellipse-D (3.ª generación), sensores LiDAR y cámaras avanzadas: este conjunto completo de sensores permite el mapeo del entorno en tiempo real, la detección de obstáculos y la planificación de rutas.
A través de nuestro patrocinio, el desarrollo de WATonoTruck por parte del laboratorio obtiene un apoyo vital en términos de alta precisión, garantizando una Motion y Navigation en la que pueden confiar.
Este esfuerzo colaborativo no solo contribuye al desarrollo exitoso de WATonoTruck, sino que también promueve el crecimiento de las aplicaciones de vehículos autónomos en diversas industrias, impulsando la innovación y la seguridad en el transporte y más allá.

Ellipse-D
El Ellipse-D es un sistema de navegación inercial que integra una doble antena y un GNSS RTK de doble frecuencia que es compatible con nuestro software de post-procesamiento Qinertia.
Diseñado para aplicaciones robóticas y geoespaciales, puede fusionar la entrada del odómetro con Pulse o CAN OBDII para mejorar la precisión de la navegación a estima.

Solicite un presupuesto para Ellipse-D
¿Tiene alguna pregunta?
¡Bienvenido a nuestra sección de preguntas frecuentes! Aquí encontrará respuestas a las preguntas más comunes sobre las aplicaciones que mostramos. Si no encuentra lo que busca, ¡no dude en ponerse en contacto con nosotros directamente!
¿Cuál es la diferencia entre RTK y PPK?
La cinemática en tiempo real (RTK) es una técnica de posicionamiento en la que las correcciones GNSS se transmiten casi en tiempo real, normalmente utilizando un flujo de corrección en formato RTCM. Sin embargo, puede haber dificultades para garantizar las correcciones GNSS, concretamente su integridad, disponibilidad, cobertura y compatibilidad.
La principal ventaja del PPK sobre el post-procesamiento RTK es que las actividades de procesamiento de datos pueden optimizarse durante el post-procesamiento, incluyendo el procesamiento hacia adelante y hacia atrás, mientras que en el procesamiento en tiempo real, cualquier interrupción o incompatibilidad en las correcciones y su transmisión conducirá a un posicionamiento de menor precisión.
Una primera ventaja clave del post-procesamiento GNSS (PPK) frente al tiempo real (RTK) es que el sistema utilizado en el campo no necesita tener un enlace de datos/radio para alimentar las correcciones RTCM procedentes del CORS al sistema INS/GNSS.
La principal limitación para la adopción del post procesamiento es el requisito de que la aplicación final actúe sobre el entorno. Por otro lado, si su aplicación puede soportar el tiempo de procesamiento adicional necesario para producir una trayectoria optimizada, mejorará enormemente la calidad de los datos para todos sus entregables.
¿Qué es el Posicionamiento Preciso de Punto?
El Posicionamiento Preciso Punto (PPP) es una técnica de navegación por satélite que ofrece un posicionamiento de alta precisión mediante la corrección de errores de señal de satélite. A diferencia de los métodos GNSS tradicionales, que a menudo se basan en estaciones de referencia terrestres (como en RTK), el PPP utiliza datos de satélite globales y algoritmos avanzados para proporcionar información de localización precisa.
El PPP funciona en cualquier parte del mundo sin necesidad de estaciones de referencia locales. Esto lo hace adecuado para aplicaciones en entornos remotos o difíciles donde la infraestructura terrestre es deficiente. Mediante el uso de datos precisos de órbita y reloj de los satélites, junto con las correcciones de los efectos atmosféricos y multitrayecto, el PPP minimiza los errores comunes del GNSS y puede alcanzar una precisión de nivel centimétrico.
Si bien el PPP puede utilizarse para el posicionamiento post-procesado, que implica el análisis de los datos recopilados a posteriori, también puede proporcionar soluciones de posicionamiento en tiempo real. El PPP en tiempo real (RTPPP) está cada vez más disponible, permitiendo a los usuarios recibir correcciones y determinar su posición en tiempo real.
