Navegación de alta precisión para vehículos autónomos
Los sistemas de navegación inercial (INS) ofrecen numerosas ventajas para las aplicaciones de vehículos autónomos. Mediante el uso de sensores como acelerómetros y giroscopios, INS proporcionan datos de navegación continuos y precisos sin depender de señales externas.
Nuestros INS actualizaciones en tiempo real sobre la posición, la velocidad y la orientación del vehículo, lo que garantiza una navegación precisa incluso en entornosGNSS. Hemos desarrollado algoritmos avanzados para minimizar los errores a lo largo del tiempo, manteniendo la precisión en el posicionamiento del vehículo.

Robustez en entornos desafiantes
Nuestro INS de forma fiable en zonas GNSS, como túneles, cañones urbanos y zonas con una densa cubierta vegetal. Protege contra el bloqueo y la suplantación de señales, al tiempo que complementa GNSS mejorar la seguridad de la navegación.
El sistema proporciona información instantánea sobre el movimiento del vehículo, lo que permite una rápida toma de decisiones y respuestas adaptativas. Sin depender de señales externas, nuestro INS de forma continua, lo que lo hace ideal para entornos dinámicos. Genera datos precisos para algoritmos avanzados, como la planificación de trayectorias, la evitación de obstáculos y la optimización de rutas. En consecuencia, los sistemas autónomos logran un funcionamiento más fluido y eficiente.
Además, mantiene un rendimiento constante independientemente de las condiciones meteorológicas, el terreno o las interrupciones de la señal. En esencia, nuestro INS la autonomía, garantiza una navegación fiable y permite que los vehículos funcionen de forma segura y eficiente en cualquier circunstancia.

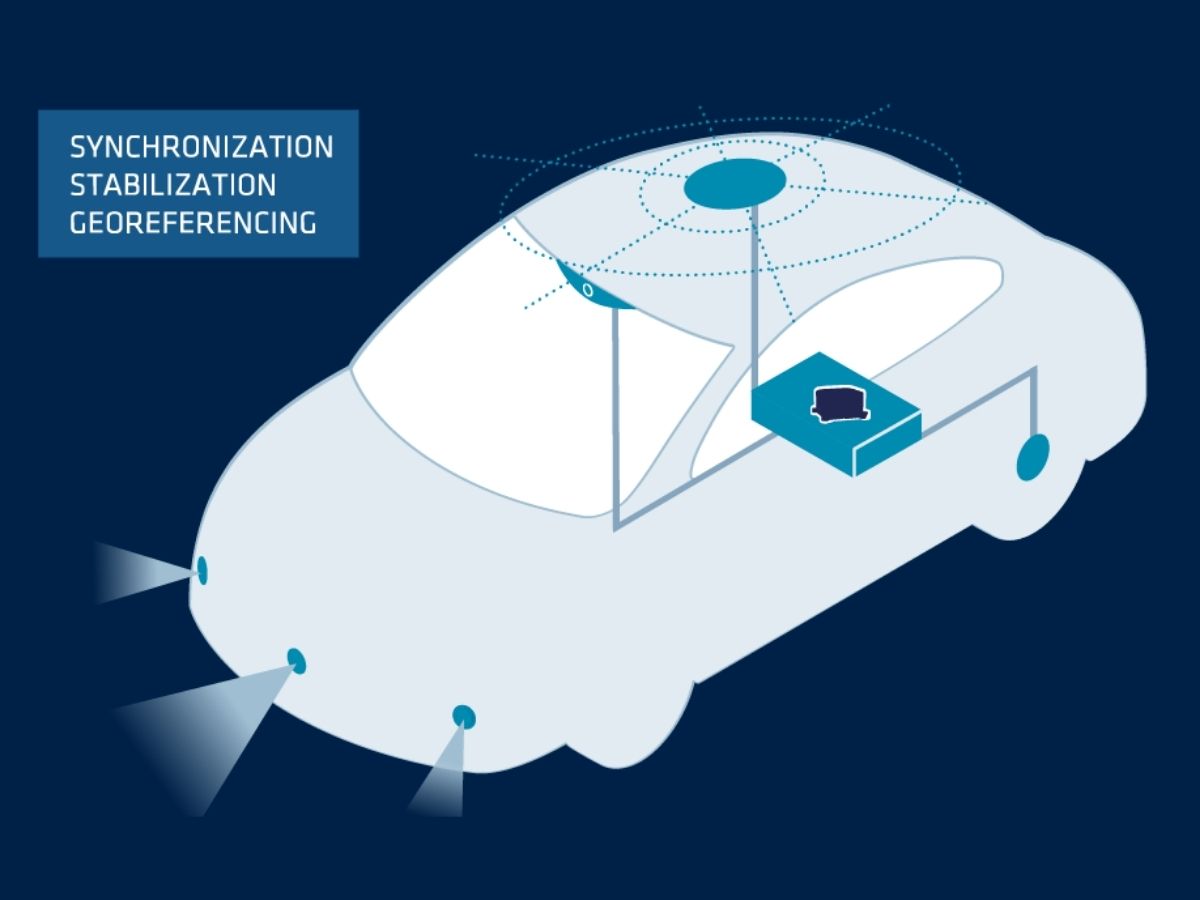
Datos en tiempo real y fusión de sensores
Nuestros sensores proporcionan datos de movimiento y orientación en tiempo real, de modo que los vehículos autónomos pueden realizar ajustes inmediatos en la dirección, la aceleración y el frenado en respuesta a los cambios en el terreno, las condiciones de la carretera o el tráfico. También ayuda a mantener la estabilidad y el control.
Combinados con otras ayudas a la navegación (por ejemplo, GNSS, LiDAR, cámaras) mejoran la precisión y la fiabilidad generales. Esta fusión de sensores mejora el conocimiento de la situación y las capacidades de toma de decisiones. Al integrar datos de múltiples sensores, nuestro INS puede ayudar a corregir las inexactitudes causadas por factores externos, garantizando una navegación más fiable.
Explore nuestras soluciones para vehículos autónomos
Nuestras soluciones se integran a la perfección con plataformas UGV para ofrecer un rendimiento fiable incluso en las condiciones más difíciles.

Ellipse-D

Ekinox Micro

Ekinox-D
Folleto de aplicaciones autónomas
¡Reciba nuestro folleto directamente en su bandeja de entrada!
Casos prácticos
Descubra cómo las soluciones inerciales de SBG Systems están revolucionando la tecnología de vehículos autónomos en nuestra sección de casos prácticos. Estas historias de éxito del mundo real destacan cómo nuestros sensores inerciales avanzados ofrecen una navegación precisa y fiabilidad en entornos difíciles. Desde la mejora de la seguridad de los vehículos en entornos urbanos hasta la optimización del rendimiento en escenarios sin cobertura GNSS, nuestras soluciones permiten que los vehículos autónomos operen con una precisión y un control inigualables.
Cada caso práctico proporciona información valiosa sobre las formas innovadoras en que nuestra tecnología está impulsando el futuro del transporte autónomo.
Detección de defectos en las vías férreas de TREALIS con Apogee Navsight
Posicionamiento de tranvías y trenes
Cómo GapEOD mejora la seguridad de los estudios geofísicos con Ellipse
Posicionamiento de tranvías y trenes
Investigación sobre transbordadores autónomos en vías navegables urbanas reales
Navegación autónoma de transbordadores
Cómo Ellipse ayudó a un barco propulsado por energía solar a competir en Mónaco
Barco que funciona con energía solar


Hablan de nosotros
Escuche de primera mano a los innovadores y clientes que han adoptado nuestra tecnología.
Sus testimonios e historias de éxito ilustran el impacto significativo que tienen nuestros sensores en aplicaciones prácticas de vehículos autónomos.
Explore otras aplicaciones con sistemas inerciales autónomos
Descubra cómo los sistemas inerciales autónomos están transformando las operaciones en diversos sectores. Desde la robótica y la automatización industrial hasta la minería y la logística, nuestras soluciones de alto rendimiento ofrecen datos precisos de navegación, orientación y movimiento, incluso en entornos con problemas de cobertura GNSS. Explore nuevas posibilidades impulsadas por una autonomía fiable.
¿Tiene alguna pregunta?
Encuentre respuestas a las preguntas más comunes sobre las aplicaciones que mostramos. Si no encuentra lo que busca, no dude en ponerse en contacto con nosotros directamente para obtener ayuda.
¿Cuáles son los niveles de autonomía de los vehículos autónomos?
Los niveles de autonomía de los vehículos autónomos se clasifican en seis niveles (Nivel 0 a Nivel 5) por la Society of Automotive Engineers (SAE), que definen el grado de automatización en el funcionamiento del vehículo. Aquí hay un desglose:
- Nivel 0: Sin automatización: el conductor humano controla totalmente el vehículo en todo momento, con sólo sistemas pasivos como alertas y advertencias.
- Nivel 1: Asistencia al conductor: el vehículo puede ayudar con la dirección o la aceleración/desaceleración, pero el conductor humano debe mantener el control y supervisar el entorno (por ejemplo, el control de crucero adaptativo).
- Nivel 2: Automatización parcial: el vehículo puede controlar tanto la dirección como la aceleración/desaceleración simultáneamente, pero el conductor debe permanecer atento y preparado para tomar el control en cualquier momento (por ejemplo, el Autopilot de Tesla, el Super Cruise de GM).
- Nivel 3: Automatización Condicional – El vehículo puede gestionar todos los aspectos de la conducción en determinadas condiciones, pero el conductor humano debe estar preparado para intervenir cuando el sistema lo solicite (por ejemplo, conducción en autopista). El conductor no necesita supervisar activamente, pero debe permanecer alerta.
- Nivel 4: Automatización alta: el vehículo puede realizar todas las tareas de conducción de forma autónoma dentro de condiciones o entornos específicos (como zonas urbanas o autopistas) sin intervención humana. Sin embargo, en otros entornos o en circunstancias especiales, es posible que un humano necesite conducir.
- Nivel 5: Automatización total: el vehículo es totalmente autónomo y puede realizar todas las tareas de conducción en todas las condiciones sin ninguna intervención humana. No es necesario un conductor y el vehículo puede funcionar en cualquier lugar y en cualquier condición.
Estos niveles ayudan a definir la evolución de la tecnología de vehículos autónomos, desde la asistencia básica al conductor hasta la autonomía total.
¿Qué es un odómetro?
Un odómetro es un instrumento utilizado para medir la distancia recorrida por un vehículo. Proporciona información importante sobre la distancia que ha recorrido un vehículo, lo que es útil para diversos fines, como la programación del mantenimiento, el cálculo de la eficiencia del combustible y la evaluación del valor de reventa.
Los odómetros miden la distancia basándose en el números de rotaciones de las ruedas del vehículo. Un factor de calibración, basado en el tamaño del neumático, convierte las rotaciones de la rueda en distancia.
En muchas aplicaciones de navegación, especialmente en vehículos, los datos del odómetro pueden integrarse con los datos del INS para mejorar la precisión general. Este proceso, conocido como fusión de sensores, combina los puntos fuertes de ambos sistemas.
¿Qué significan jamming y spoofing?
El jamming y el spoofing son dos tipos de interferencia que pueden afectar significativamente la fiabilidad y la precisión de los sistemas de navegación por satélite como el GNSS.
El jamming se refiere a la interrupción intencional de las señales de satélite mediante la transmisión de señales de interferencia en las mismas frecuencias utilizadas por los sistemas GNSS. Esta interferencia puede sobrecargar o ahogar las señales de satélite legítimas, lo que hace que los receptores GNSS no puedan procesar la información con precisión. El jamming se utiliza comúnmente en operaciones militares para interrumpir las capacidades de navegación de los adversarios, y también puede afectar a los sistemas civiles, lo que lleva a fallos de navegación y desafíos operativos.
El spoofing, por otro lado, implica la transmisión de señales falsificadas que imitan las señales GNSS genuinas. Estas señales engañosas pueden inducir a los receptores GNSS a calcular posiciones u horas incorrectas. El spoofing se puede utilizar para desviar o desinformar a los sistemas de navegación, lo que podría provocar que vehículos o aeronaves se desvíen de su rumbo o proporcionar datos de ubicación falsos. A diferencia del jamming, que simplemente obstruye la recepción de la señal, el spoofing engaña activamente al receptor presentando información falsa como legítima.
Tanto el jamming como el spoofing representan amenazas significativas para la integridad de los sistemas dependientes de GNSS, lo que requiere contramedidas avanzadas y tecnologías de navegación resilientes para garantizar un funcionamiento fiable en entornos disputados o desafiantes.
¿Qué es la navegación por estima?
La navegación a estima es un método de navegación que determina la posición actual de un vehículo propagando continuamente una posición pasada conocida utilizando información de movimiento medida, sin depender de señales externas como el GPS.
En la práctica, el sistema parte de un punto de referencia —a menudo la última posición precisa conocida— y utiliza sensores a bordo como acelerómetros, giróscopos, odometría de rueda o sondas de velocidad para estimar cómo se ha movido el vehículo a lo largo del tiempo. Al integrar estas mediciones de movimiento, la navegación por estima calcula los cambios en velocidad, orientación y desplazamiento, construyendo gradualmente una estimación de posición actualizada. Aunque proporciona una navegación totalmente autónoma incluso en entornos sin GPS o degradados, la navegación por estima está inherentemente sujeta a la acumulación de errores: pequeños sesgos de los sensores, errores de factor de escala o influencias ambientales crecen con el tiempo, haciendo que la trayectoria estimada se desvíe de la realidad.
Para mitigar esta deriva, la navegación por estima se combina a menudo con ayudas externas como GNSS, magnetómetros, barómetros o técnicas de coincidencia de terreno en sistemas de navegación inercial modernos. A pesar de sus limitaciones, la navegación por estima sigue siendo un principio fundamental en la navegación porque asegura un posicionamiento continuo y en tiempo real incluso cuando las referencias absolutas no están disponibles.
¿Qué es un sistema de navegación inercial?
Un sistema de navegación inercial (INS) es una solución de navegación autónoma que determina la posición, velocidad y orientación de una plataforma en movimiento mediante la medición continua de su movimiento utilizando sensores inerciales. En su esencia, un INS se basa en una tríada de acelerómetros para detectar aceleraciones lineales a lo largo de tres ejes perpendiculares y una tríada de giróscopos para medir las velocidades angulares alrededor de esos mismos ejes. Al integrar estas mediciones a lo largo del tiempo, el sistema calcula cómo evolucionan la velocidad, la actitud y la ubicación de la plataforma a partir de un punto de partida conocido.
Dado que un INS no depende de señales externas como GPS, balizas de radio o referencias visuales, puede operar de forma fiable en entornos donde las ayudas a la navegación externas no están disponibles, son denegadas o están degradadas —como bajo el agua, en interiores, bajo tierra o en escenarios militares de interferencia de GNSS.
Los INS modernos suelen incorporar algoritmos de filtrado sofisticados, más comúnmente un filtro de Kalman, para fusionar datos brutos de los sensores, mitigar la deriva y estimar el estado de navegación más preciso. En muchas aplicaciones, el INS se acopla con GNSS, odómetros, registros de velocidad Doppler o magnetómetros para limitar la deriva a largo plazo y proporcionar una navegación altamente estable. El resultado es una solución de navegación robusta y de alta tasa de actualización, esencial para aeronaves, UAVs, misiles, vehículos autónomos, barcos, AUVs y una amplia gama de sistemas industriales que requieren un conocimiento preciso y continuo del movimiento y la orientación.
