Inżynieria pojazdów autonomicznych: nawigacja Zurich UAS Racing z Ellipse-D
Zespół Zurich UAS Racing rozwiązał krytyczne problemy z dryftem pozycji, które wcześniej uniemożliwiały im jazdę bez kierowcy. Ten przełom w inżynierii pojazdów autonomicznych pozwala teraz zespołowi rozpocząć podróż w kierunku dyscypliny autocross w słynnych zawodach Formula Student.
Ellipse-D pozwala nam uzyskać absolutną pozycję naszego samochodu na torze. Dokładna pozycja jest niezbędna do działania naszego systemu bezzałogowego. Jednym z naszych największych problemów był dryft pozycji w czasie. Z Ellipse-D będziemy w stanie zmierzyć się z dyscypliną autocross, która wcześniej była dla nas niemożliwa. | Finn Scheller, C-Leader zespołu Zurich UAS Racing.

Informacje o zespole zajmującym się inżynierią pojazdów autonomicznych
Zurich UAS Racing (ZUR) to pełen pasji zespół Formula Student z Zurich University of Applied Sciences w Winterthur w Szwajcarii. To ambitne stowarzyszenie studenckie, założone w 2019 roku, bierze udział w największych na świecie zawodach inżynierskich Formula Student, budując elektryczne i autonomiczne samochody, aby ścigać się z uniwersytetami z całego świata.

Zespół rozrósł się do ponad 70 zmotywowanych studentów z różnych programów studiów, których łączy cel optymalizacji osiągów wyścigowych i rozwoju inżynierii pojazdów autonomicznych.
Formula Student
Cieszące się międzynarodowym uznaniem zawody Formula Student stanowią wyzwanie dla zespołów studenckich, które mają zaprojektować i zbudować samochody wyścigowe Formuły, rywalizując w różnych dyscyplinach, w tym w projektowaniu inżynieryjnym, analizie kosztów i dynamicznych wydarzeniach na torze.

Samochód: ZUR04
Podróż ZUR rozpoczęła się od ich pierwszego funkcjonalnego samochodu w 2021 roku, z powodzeniem uczestnicząc w wydarzeniach związanych z pojazdami elektrycznymi (EV) od 2022 roku. Ich bezzałogowy samochód wyścigowy, ZUR04, reprezentuje najnowocześniejsze osiągnięcia inżynierii studenckich pojazdów autonomicznych z czterema elektrycznymi silnikami w piaście koła, generującymi łącznie moc 140 kW, umożliwiającymi przyspieszenie od 0 do 100 km/h w zaledwie 2,5 sekundy.
Pojazd jest zaprojektowany zarówno do jazdy przez człowieka, jak i do wyścigów autonomicznych, z osiągami porównywalnymi z profesjonalnymi samochodami wyścigowymi. Jego system bezzałogowy jest obecnie w fazie testów.
Wymagania techniczne Zurich UAS Racing
ZUR potrzebował zaawansowanego Inercyjnego Systemu Nawigacyjnego (INS), który mógłby bezproblemowo zintegrować się z ich autonomicznym systemem wyścigowym, spełniając jednocześnie wysokie wymagania związane z zawodami o dużej prędkości.
Ich głównym wyzwaniem było osiągnięcie niezawodnego pozycjonowania w dynamicznym środowisku wyścigowym, gdzie tradycyjne systemy lokalizacji często zawodzą z powodu dryftu pozycji w czasie.
System musiał zapewniać absolutną dokładność pozycji, niezbędną do działania ich systemu bezzałogowego, szczególnie w wymagającej dyscyplinie autocross, która wymaga precyzyjnej nawigacji przez złożone układy stożków.
Krótko mówiąc, to były kluczowe problemy:
- Dryft pozycji: znaczny dryft w czasie uniemożliwiający dokładną lokalizację.
- Ograniczenie autocross: brak możliwości konkurowania w dyscyplinie autocross z powodu problemów z pozycjonowaniem.
- Ograniczone informacje o danych: niewystarczające dane dotyczące dynamiki pojazdu do optymalizacji oprogramowania.

A to były podstawowe wymagania:
- Precyzyjna lokalizacja: Potrzeba absolutnej pozycji na torze.
- Integracja z ROS: Bezproblemowa integracja z istniejącym systemem autonomicznym opartym na ROS.
- Kompaktowe rozwiązanie: Lekka jednostka o dobrym stosunku mocy do masy.
- Otwarta dokumentacja: Łatwo dostępne zasoby techniczne.
- Wysoka dynamika: Zdolność do radzenia sobie w ekstremalnych warunkach wyścigowych.
Po ocenie scenariusza ZUR, zarekomendowaliśmy nasz Ellipse-D, inercyjny system nawigacyjny (INS) zaprojektowana specjalnie do wymagających zastosowań, gdzie precyzja i niezawodność mają kluczowe znaczenie.
Nasze rozwiązanie dla wyścigów autonomicznych: Ellipse-D
Ellipse-D to najmniejszy system RTK GNSS/INS z dwiema antenami, zapewniający pozycjonowanie na poziomie centymetrów i precyzyjny heading dla dynamicznych zastosowań wyścigowych.
Ta technologia stanowi znaczący postęp w rozwiązaniach inżynieryjnych dla pojazdów autonomicznych, oferując zespołom:
- Wysoka precyzja: Dokładność pozycjonowania na poziomie centymetrów, niezbędna do precyzyjnej nawigacji po torze i unikania przeszkód w wyścigach autonomicznych.
- Heading z wykorzystaniem dwóch anten: Doskonała wydajność w trudnych środowiskach, w których zakłócenia magnetyczne pochodzące od silników elektrycznych i systemów elektronicznych mogłyby negatywnie wpłynąć na działanie tradycyjnych systemów kompasowych.
- Zgodność z wymogami wyścigowymi: Kompaktowa konstrukcja i wytrzymała budowa idealnie nadają się do zastosowań wyścigowych o wysokiej dynamice, z wyjątkową odpornością na wibracje i temperaturę.

Ostatecznie, czwartym punktem istotnym dla aspiracji ZUR była integracja z ROS, która, jak sami stwierdzili, w połączeniu z innymi cechami sprawiła, że cały pakiet stał się najbardziej opłacalnym rozwiązaniem dostępnym na rynku:
„Głównym argumentem przemawiającym za wyborem tego rozwiązania była dla nas dokumentacja open-source i biblioteka interfejsów. Pełne wsparcie przez ROS jest również dla nas dużą zaletą, ponieważ nasz samochód już działa na ROS. Doceniamy również wsparcie SBG Systems dla naszego zespołu w zakresie poprawy naszych osiągów dzięki ich produktom. W porównaniu z innymi dostawcami tego typu produktów, SBG Systems zaoferowało nam najlepszy stosunek jakości do ceny” – podkreśla Scheller.
Zaawansowana integracja i wydajność
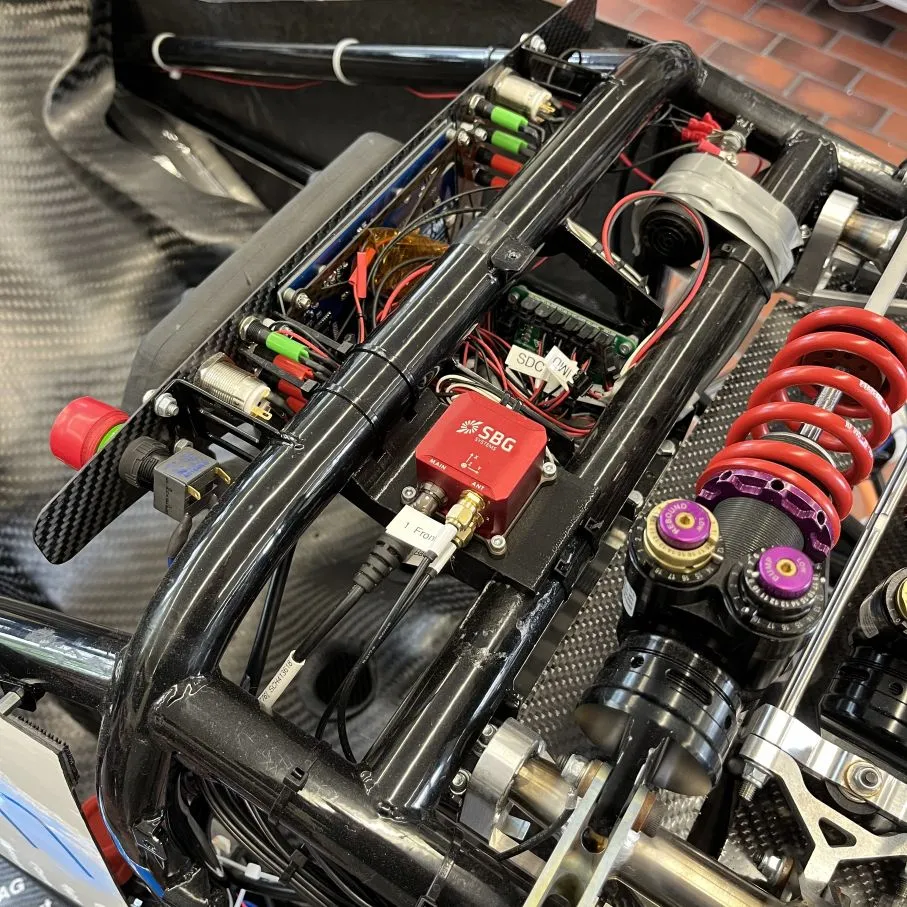
Proces integracji wykazał wszechstronność Ellipse-D i skuteczność podejścia wsparcia SBG Systems. Podłączony zarówno do platformy obliczeniowej RaspberryPi, jak i NVIDIA Jetson, system wykorzystuje zarówno bibliotekę sbgECom, jak i pakiet ROS2 w celu kompleksowego dostępu do danych i ich przetwarzania.
Taka architektura umożliwia dystrybucję danych nawigacyjnych w czasie rzeczywistym w całym autonomicznym systemie, przy jednoczesnym zachowaniu elastyczności potrzebnej do tworzenia niestandardowych algorytmów.
Zespół wykorzystuje również możliwości Ellipse-D do opracowywania zaawansowanych algorytmów torque vectoring, które wykorzystują dane z INS. Zbudowali również rover i stację bazową GNSS RTK, aby zapewnić precyzyjne dane o terenie.
Oprócz integracji INS z autonomicznym samochodem ZUR04, z testami torowymi zaplanowanymi na lato, zespół zintegrował INS z nowo zbudowanym samochodem wyścigowym ZUR05. Ellipse-D będzie również kluczowym elementem w autonomicznym pojeździe ZUR06 w przyszłym sezonie.
Trzy najważniejsze wybory Zurich UAS Racing
ZUR podkreślił trzy wyróżniające się aspekty, które cenią we współpracy z SBG Systems.
- Open-source: Po pierwsze, docenili podejście open-source, które jest zgodne z ich misją edukacyjną i metodologią rozwoju. Transparentna dokumentacja i biblioteki interfejsów umożliwiają studentom zrozumienie i modyfikowanie systemu zgodnie z ich specyficznymi potrzebami, zapewniając bezcenne możliwości uczenia się w zakresie inżynierii pojazdów autonomicznych.
- Doskonała dokumentacja: Zespół docenił kompleksową i ogólnie dostępną dokumentację produktu, która usprawniła proces integracji. W przeciwieństwie do wielu komercyjnych systemów, które zapewniają ograniczone szczegóły techniczne, podejście SBG Systems umożliwiło szybkie zrozumienie i wdrożenie.
- Dobra komunikacja: Na koniec, podkreślili wyjątkową komunikację i wsparcie, zaznaczając, że zawsze czuli się wysłuchani i otrzymywali odpowiedzi na wszystkie swoje pytania. To responsywne wsparcie okazało się kluczowe dla zespołu studenckiego pracującego pod presją krótkich terminów konkursowych.
Podsumowanie
Wdrożenie rozwiązania pozwoliło ZUR uporać się z najpoważniejszym wyzwaniem: dryftem pozycji, który wcześniej uniemożliwiał im konkurowanie w dyscyplinie autocross. Dzięki centymetrowej dokładności systemu Ellipse-D i określeniu heading za pomocą dwóch anten, zespół może teraz rozpocząć jazdy próbne, aby w następnym sezonie (lato 2026) wystartować bez kierowcy, wykorzystując samochód wyścigowy nowej generacji.

Ta współpraca jest przykładem siły partnerstwa przemysłowo-edukacyjnego w rozwoju technologii pojazdów autonomicznych.
“Ellipse to idealny punkt wejścia w systemy INS. W przyszłości planujemy używać mocniejszych systemów w połączeniu z naszym nowo opracowanym systemem pojazdów opartym na sieci Ethernet” – podsumowuje Scheller.
Nasze zaangażowanie we wspieranie zespołów studenckich, takich jak ZUR, pokazuje, jak zapewnienie dostępu do profesjonalnej technologii nawigacyjnej umożliwia następnemu pokoleniu inżynierów przesuwanie granic możliwości w autonomicznych wyścigach.
Ellipse-D
Ellipse-D to kompaktowy, wysokowydajny system nawigacji inercyjnej wspomagany przez GNSS, który zapewnia niezawodne pomiary orientacji, pozycji i kołysania (heave).
Łączy w sobie IMU z dwupasmowym odbiornikiem GNSS i wykorzystuje algorytmy fuzji czujników, aby zapewnić dokładne pozycjonowanie w wymagających środowiskach.
Oferuje możliwość wykorzystania dwóch anten dla precyzyjnego określania heading w warunkach statycznych.

Zapytaj o wycenę Ellipse-D
Masz pytania?
Witamy w naszej sekcji FAQ! Znajdziesz tutaj odpowiedzi na najczęściej zadawane pytania dotyczące prezentowanych przez nas aplikacji. Jeśli nie znajdziesz tego, czego szukasz, skontaktuj się z nami bezpośrednio!
Jak działają samochody autonomiczne?
Samochody autonomiczne to pojazdy wyposażone w zaawansowane systemy, które umożliwiają im nawigację i sterowanie bez interwencji człowieka. Pojazdy te wykorzystują kombinację autonomicznych czujników jazdy i algorytmów do postrzegania otoczenia, podejmowania decyzji i wykonywania zadań związanych z autonomiczną jazdą. Celem jest osiągnięcie pełnej autonomii, w której pojazd może bezpiecznie i wydajnie obsługiwać wszystkie aspekty jazdy.
Samochody autonomiczne polegają na szeregu kluczowych technologii do postrzegania otoczenia. Należą do nich:
- GNSS (Global Navigation Satellite System): do uzyskiwania aktualnych informacji w czasie rzeczywistym o pozycji, prędkości i kierunku jazdy samochodu autonomicznego.
- INS (Inercyjne Systemy Nawigacyjne): aby utrzymać dokładność w przypadku przerw w sygnale GNSS. Zapewnia aktualizacje w czasie rzeczywistym dotyczące pozycji, prędkości i kierunku autonomicznego samochodu.
- LiDAR (Light Detection and Ranging): wykorzystanie wiązek laserowych do tworzenia szczegółowej mapy 3D otoczenia pojazdu. Technologia ta pomaga samochodowi wykrywać i mierzyć obiekty wokół niego, w tym inne pojazdy, pieszych i znaki drogowe.
- Radar (Radio Detection and Ranging): wykorzystanie fal radiowych do wykrywania prędkości, odległości i kierunku obiektów. Radar jest szczególnie przydatny w trudnych warunkach pogodowych oraz do wykrywania obiektów z większych odległości.
- Kamery: do przechwytywania informacji wizualnych o otoczeniu pojazdu, w tym oznaczeń pasów ruchu, sygnalizacji świetlnej i znaków drogowych. Są one niezbędne do interpretacji złożonych wskazówek wizualnych i podejmowania decyzji na podstawie danych wizualnych.
Jakie jest 6 stopni automatyzacji w pojazdach?
6 poziomów samochodów autonomicznych, zdefiniowanych przez Society of Automotive Engineers (SAE) w standardzie J3016, opisuje stopnie automatyzacji w pojazdach. Oto podział:
- Poziom 0: brak automatyzacji. Ostrzeżenia lub chwilowa pomoc, takie jak automatyczne hamowanie awaryjne lub ostrzeżenia o martwym polu, ale brak trwałej automatyzacji.
- Poziom 1: wspomaganie kierowcy. Pojedynczy zautomatyzowany system wsparcia, taki jak adaptacyjny tempomat (utrzymywanie prędkości i odległości) lub asystent utrzymania pasa ruchu.
- Poziom 2: częściowa automatyzacja. Kombinacja systemów, takich jak kierowanie i przyspieszanie/zwalnianie, ale bez podejmowania decyzji.
- Poziom 3: warunkowa automatyzacja. Samochód obsługuje większość zadań związanych z prowadzeniem pojazdu w określonych warunkach (np. jazda po autostradzie). System może monitorować otoczenie.
- Poziom 4: wysoka automatyzacja. Samochód działa niezależnie w predefiniowanych scenariuszach. W tych obszarach nie jest wymagana uwaga kierowcy.
- Poziom 5: pełna automatyzacja. Pojazd może wykonywać wszystkie zadania w każdym środowisku, w którym mógłby sobie poradzić ludzki kierowca. Może nie być obecna kierownica ani pedały.
Poziomy te ilustrują postęp od pojazdów sterowanych przez człowieka do w pełni autonomicznych systemów zdolnych do wykonywania wszystkich zadań związanych z prowadzeniem pojazdu.
Czy INS akceptuje dane wejściowe z zewnętrznych czujników wspomagających?
Inercyjne systemy nawigacyjne z naszej firmy akceptują dane wejściowe z zewnętrznych czujników wspomagających, takich jak czujniki danych lotniczych, magnetometry, odometry, DVL i inne.
Ta integracja sprawia, że INS jest wysoce wszechstronny i niezawodny, szczególnie w środowiskach, gdzie sygnał GNSS jest niedostępny.
Te zewnętrzne czujniki poprawiają ogólną wydajność i dokładność INS, dostarczając uzupełniające się dane.
Jaka jest różnica między IMU a INS?
Różnica między inercyjnym zespołem pomiarowym (IMU) a inercyjnym systemem nawigacyjnym (INS) polega na ich funkcjonalności i złożoności.
IMU inercyjny moduł pomiarowy) dostarcza surowe dane dotyczące przyspieszenia liniowego i prędkości kątowej pojazdu, mierzone za pomocą akcelerometrów i żyroskopów. Dostarcza informacji o przechyłach, pochyleniach, odchyleniach i ruchu, ale nie oblicza danych dotyczących pozycji ani nawigacji. IMU specjalnie zaprojektowana przekazywania niezbędnych danych o ruchu i orientacji do zewnętrznego przetwarzania w celu określenia pozycji lub prędkości.
Z drugiej strony, INS inercyjny system nawigacyjny) łączy IMU z zaawansowanymi algorytmami w celu obliczenia pozycji, prędkości i orientacji pojazdu w czasie. Wykorzystuje algorytmy nawigacyjne, takie jak filtrowanie Kalmana, do fuzji i integracji danych z czujników. INS dane nawigacyjne w czasie rzeczywistym, w tym pozycję, prędkość i orientację, bez konieczności polegania na zewnętrznych systemach pozycjonowania, takich jak GNSS.
Ten system nawigacyjny jest zazwyczaj wykorzystywany w zastosowaniach wymagających kompleksowych rozwiązań nawigacyjnych, szczególnie w środowiskach GNSS, takich jak wojskowe bezzałogowe statki powietrzne (UAV), statki i okręty podwodne.
Jaka jest różnica między AHRS a INS?
Główna różnica między Attitude and Heading Reference System (AHRS) a Inertial Navigation System (INS) polega na ich funkcjonalności i zakresie dostarczanych danych.
AHRS dostarcza informacji o orientacji — w szczególności o położeniu (pitch, roll) i kierunku (yaw) pojazdu lub urządzenia. Zazwyczaj wykorzystuje kombinację czujników, w tym żyroskopy, akcelerometry i magnetometry, do obliczania i stabilizacji orientacji. AHRS podaje pozycję kątową w trzech osiach (pitch, roll i yaw), umożliwiając systemowi zrozumienie jego orientacji w przestrzeni. Jest często stosowany w lotnictwie, UAV, robotyce i systemach morskich w celu zapewnienia dokładnych danych o położeniu i kierunku, co ma kluczowe znaczenie dla kontroli i stabilizacji pojazdu.
INS nie tylko dostarcza dane o orientacji (jak AHRS), ale także śledzi pozycję, prędkość i przyspieszenie pojazdu w czasie. Wykorzystuje czujniki inercyjne do szacowania ruchu w przestrzeni 3D bez polegania na zewnętrznych odniesieniach, takich jak GNSS. Łączy czujniki znajdujące się w AHRS (żyroskopy, akcelerometry), ale może również zawierać bardziej zaawansowane algorytmy do śledzenia pozycji i prędkości, często integrując się z danymi zewnętrznymi, takimi jak GNSS, dla zwiększenia dokładności.
Podsumowując, AHRS koncentruje się na orientacji (pozycji i heading), podczas gdy INS dostarcza pełny zestaw danych nawigacyjnych, w tym pozycję, prędkość i orientację.
