High precision navigation for autonomous vehicles
Inertial Navigation Systems (INS) offer numerous benefits for autonomous vehicle applications. By using sensors like accelerometers and gyroscopes, INS solution provide continuous and accurate navigation data without reliance on external signals.
Our INS provide real-time updates on the vehicle’s position, velocity, and orientation, ensuring accurate navigation even in GNSS-denied environments. We developed advanced algorithms to minimize errors over time, maintaining accuracy in vehicle positioning.

Robustness in challenging environments
Our INS operates reliably in GNSS-challenged areas, including tunnels, urban canyons, and dense canopy. It protects against signal jamming and spoofing while complementing GNSS to enhance navigation security.
The system delivers instantaneous vehicle motion feedback, enabling rapid decision-making and adaptive responses. Without relying on external signals, our INS functions continuously, ideal for dynamic environments. It generates precise data for advanced algorithms, such as path planning, obstacle avoidance, and route optimization. Consequently, autonomous systems achieve smoother, more efficient operation.
Furthermore, it maintains consistent performance regardless of weather, terrain, or signal disruptions. In essence, our INS strengthens autonomy, ensures reliable navigation, and empowers vehicles to operate safely and efficiently under all conditions.

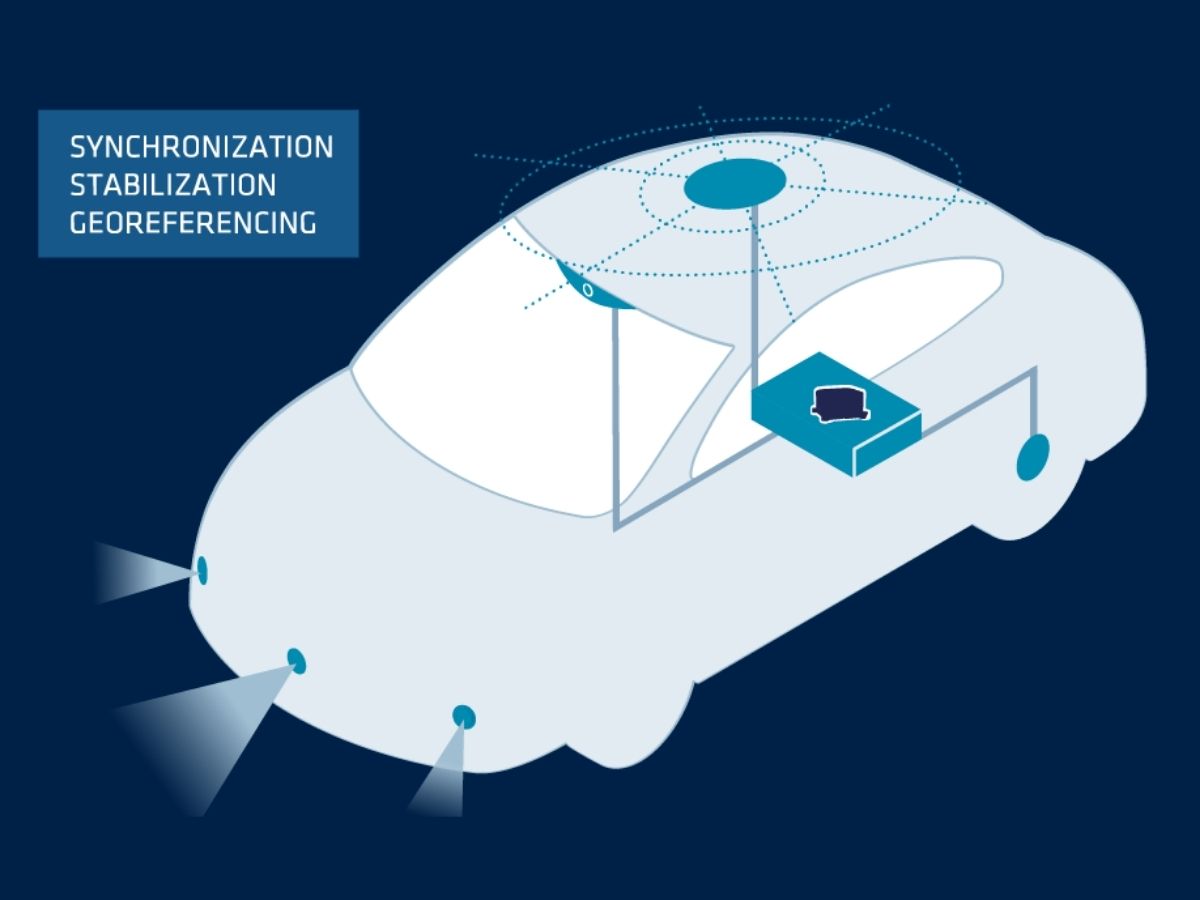
Real-time data and sensor fusion
Our sensors provide real-time motion and orientation data, so autonomous vehicles can make immediate adjustments to steering, acceleration, and braking in response to changes in terrain, road conditions, or traffic. It also helps maintain stability and control.
Combined with other navigation aids (e.g., GNSS, LiDAR, cameras) they improve overall accuracy and reliability. These sensors fusion enhances situational awareness and decision-making capabilities. By integrating data from multiple sensors, our INS can help correct inaccuracies caused by external factors, ensuring more reliable navigation.
Explore our solutions for autonomous vehicles
Our solutions integrate seamlessly with UGV platforms, to deliver reliable performance in even the most challenging conditions.

Ellipse-D

Ekinox Micro

Ekinox-D
Autonomous applications brochure
Get our brochure delivered straight to your inbox!
Case studies
Discover how SBG Systems’ inertial solutions are revolutionizing autonomous vehicle technology in our case studies section. These real-world success stories highlight how our advanced inertial sensors deliver precise navigation and reliability in challenging environments. From improving vehicle safety in urban settings to optimizing performance in GNSS-denied scenarios, our solutions empower autonomous vehicles to operate with unmatched accuracy and control.
Each case study provides valuable insights into the innovative ways our technology is driving the future of autonomous transportation.


Autonomous ferry research in real-world urban waterways
Autonomous ferry navigation
How Ellipse-D helped a solar-powered boat compete in Monaco
Solar-powered boat


They talk about us
Hear first hand, from the innovators and clients who have adopted our technology.
Their testimonials and success stories illustrate the significant impact our sensors have in practical autonomous vehicles applications.
Explore other applications with autonomous inertial systems
Discover how autonomous inertial systems are transforming operations across diverse industries. From robotics and industrial automation to mining and logistics, our high-performance solutions deliver precise navigation, orientation, and motion data—even in GNSS-challenge environments. Explore new possibilities powered by reliable autonomy.
Do you have questions?
Find answers to the most common questions about the applications we showcase. Should you not find what you seek, please do not hesitate to reach out to us directly for assistance.
What are the autonomy levels of autonomous vehicles?
The autonomy levels of autonomous vehicles are classified into six levels (Level 0 to Level 5) by the Society of Automotive Engineers (SAE), defining the extent of automation in vehicle operation. Here’s a breakdown:
- Level 0: No Automation – The human driver fully controls the vehicle at all times, with only passive systems like alerts and warnings.
- Level 1: Driver Assistance – The vehicle can assist with either steering or acceleration/deceleration, but the human driver must remain in control and monitor the environment (e.g., adaptive cruise control).
- Level 2: Partial Automation – The vehicle can control both steering and acceleration/deceleration simultaneously, but the driver must remain engaged and ready to take over at any moment (e.g., Tesla’s Autopilot, GM’s Super Cruise).
- Level 3: Conditional Automation – The vehicle can handle all aspects of driving in certain conditions, but the human driver must be ready to intervene when requested by the system (e.g., highway driving). The driver doesn’t need to actively monitor but must remain alert.
- Level 4: High Automation – The vehicle can perform all driving tasks autonomously within specific conditions or environments (like urban areas or highways) without human intervention. However, in other environments or under special circumstances, a human may need to drive.
- Level 5: Full Automation- The vehicle is fully autonomous and can handle all driving tasks in all conditions without any human intervention. There is no need for a driver, and the vehicle can operate anywhere, under any conditions.
These levels help define the evolution of autonomous vehicle technology, from basic driver assistance to full autonomy.
What is an odometer?
An odometer is an instrument used to measure the distance traveled by a vehicle. It provides important information about how far a vehicle has gone, which is useful for various purposes such as maintenance scheduling, fuel efficiency calculations, and resale value assessment.
Odometers measure distance based on the number of rotations of the vehicle’s wheels. A calibration factor, based on the tire size, converts wheel rotations into distance.
In many navigation applications, especially in vehicles, odometer data can be integrated with INS data to improve overall accuracy. This process, known as sensor fusion, combines the strengths of both systems.
What does jamming and spoofing mean?
Jamming and spoofing are two types of interference that can significantly affect the reliability and accuracy of satellite-based navigation systems like GNSS.
Jamming refers to the intentional disruption of satellite signals by broadcasting interfering signals on the same frequencies used by GNSS systems. This interference can overwhelm or drown out the legitimate satellite signals, rendering GNSS receivers unable to process the information accurately. Jamming is commonly used in military operations to disrupt the navigation capabilities of adversaries, and it can also affect civilian systems, leading to navigation failures and operational challenges.
Spoofing, on the other hand, involves the transmission of counterfeit signals that mimic genuine GNSS signals. These deceptive signals can mislead GNSS receivers into calculating incorrect positions or times. Spoofing can be used to misdirect or misinform navigation systems, potentially causing vehicles or aircraft to veer off course or providing false location data. Unlike jamming, which merely obstructs signal reception, spoofing actively deceives the receiver by presenting false information as legitimate.
Both jamming and spoofing pose significant threats to the integrity of GNSS-dependent systems, necessitating advanced countermeasures and resilient navigation technologies to ensure reliable operation in contested or challenging environments.
What is dead reckoning ?
Dead reckoning is a navigation method that determines the current position of a vehicle by continuously propagating a known past position using measured motion information, without relying on external signals like GPS.
In practice, the system starts from a reference point—often the last known accurate position—and uses onboard sensors such as accelerometers, gyroscopes, wheel odometry, or speed logs to estimate how the vehicle has moved over time. By integrating these motion measurements, dead reckoning computes changes in velocity, orientation, and displacement, gradually building an updated position estimate. While it provides fully autonomous navigation even in GPS-denied or degraded environments, dead reckoning is inherently subject to error accumulation: small sensor biases, scale factor errors, or environmental influences grow over time, causing the estimated trajectory to drift from reality.
To mitigate this drift, dead reckoning is often combined with external aids such as GNSS, magnetometers, barometers, or terrain-matching techniques in modern inertial navigation systems. Despite its limitations, dead reckoning remains a fundamental principle in navigation because it ensures continuous, real-time positioning even when absolute references are unavailable.
What is inertial navigation system ?
An inertial navigation system (INS) is a self-contained navigation solution that determines the position, velocity, and orientation of a moving platform by continuously measuring its motion using inertial sensors. At its core, an INS relies on a triad of accelerometers to sense linear accelerations along three perpendicular axes and a triad of gyroscopes to measure angular rates around those same axes. By integrating these measurements over time, the system computes how the platform’s speed, attitude, and location evolve from a known starting point.
Because an INS does not depend on external signals such as GPS, radio beacons, or visual references, it can operate reliably in environments where external navigation aids are unavailable, denied, or degraded—such as underwater, indoors, underground, or in military GNSS-jamming scenarios.
Modern INS typically incorporate sophisticated filtering algorithms, most commonly a Kalman filter, to fuse raw sensor data, mitigate drift, and estimate the most accurate navigation state. In many applications, the INS is coupled with GNSS, odometers, Doppler velocity logs, or magnetometers to constrain long-term drift and deliver highly stable navigation. The result is a robust, high-update-rate navigation solution essential for aircraft, UAVs, missiles, autonomous vehicles, ships, AUVs, and a wide range of industrial systems that require precise, continuous awareness of motion and orientation.
