Navegação de alta precisão para veículos autônomos
Os Sistemas de Navegação Inercial (INS) oferecem inúmeras vantagens para aplicações em veículos autônomos. Ao utilizar sensores como acelerômetros e giroscópios, INS fornecem dados de navegação contínuos e precisos, sem depender de sinais externos.
Nossos INS atualizações em tempo real sobre a posição, a velocidade e a orientação do veículo, garantindo uma navegação precisa mesmo em ambientesGNSS. Desenvolvemos algoritmos avançados para minimizar erros ao longo do tempo, mantendo a precisão no posicionamento do veículo.

Robustez em ambientes desafiadores
Nosso INS de forma confiável em áreas GNSS, incluindo túneis, canyons urbanos e copas de árvores densas. Ele protege contra interferência e falsificação de sinais, ao mesmo tempo em que complementa GNSS aumentar a segurança da navegação.
O sistema fornece feedback instantâneo sobre o movimento do veículo, permitindo uma tomada de decisão rápida e respostas adaptativas. Sem depender de sinais externos, nosso INS continuamente, sendo ideal para ambientes dinâmicos. Ele gera dados precisos para algoritmos avançados, como planejamento de trajetória, desvio de obstáculos e otimização de rota. Consequentemente, os sistemas autônomos alcançam uma operação mais suave e eficiente.
Além disso, ele mantém um desempenho consistente independentemente das condições climáticas, do terreno ou de interrupções no sinal. Em essência, nosso INS a autonomia, garante uma navegação confiável e capacita os veículos a operarem com segurança e eficiência em todas as condições.

Dados em tempo real e fusão de sensores
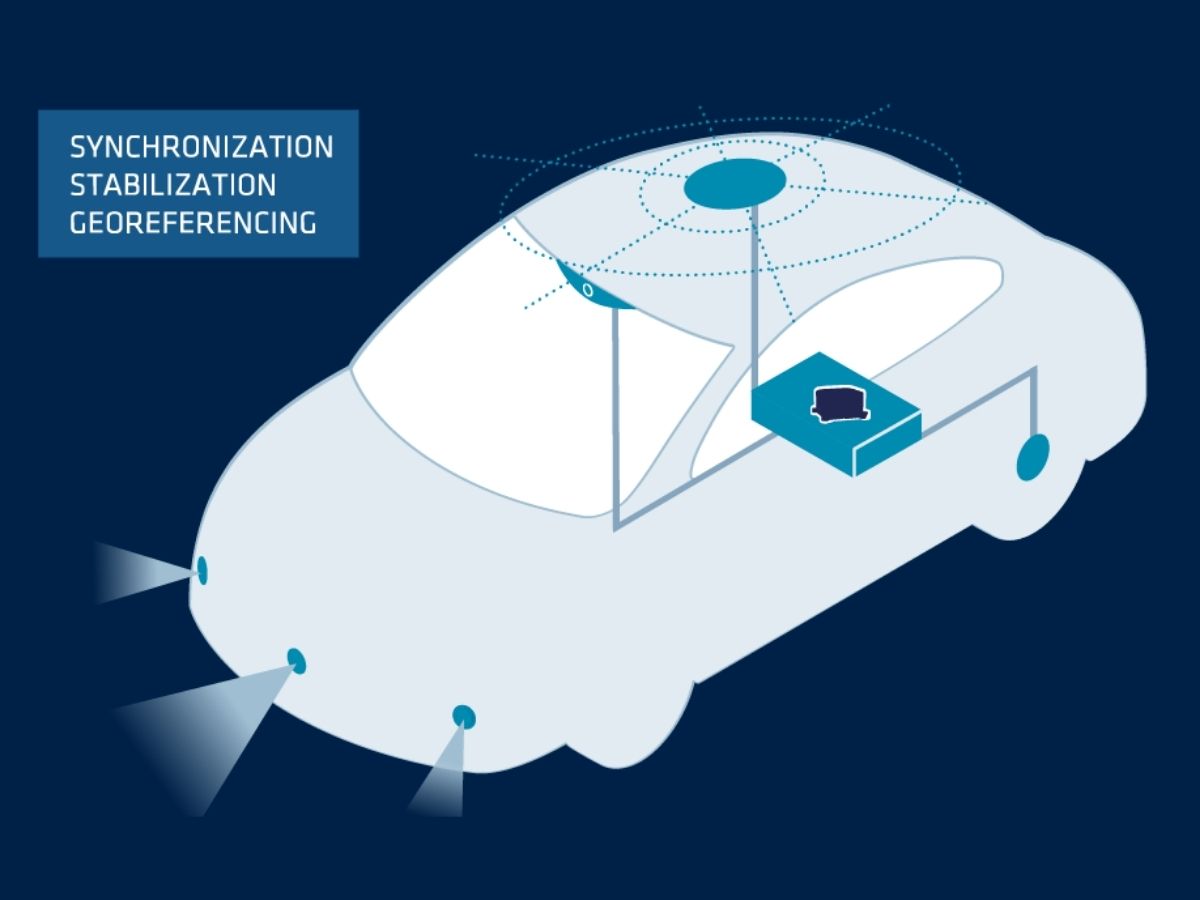
Nossos sensores fornecem dados de movimento e orientação em tempo real, para que os veículos autônomos possam fazer ajustes imediatos na direção, aceleração e frenagem em resposta a mudanças no terreno, nas condições da estrada ou no tráfego. Também ajuda a manter a estabilidade e o controle.
Combinados com outros auxílios de navegação (por exemplo, GNSS, LiDAR, câmeras), eles melhoram a precisão e a confiabilidade geral. Essa fusão de sensores aprimora a percepção situacional e os recursos de tomada de decisão. Ao integrar dados de vários sensores, nosso INS pode ajudar a corrigir imprecisões causadas por fatores externos, garantindo uma navegação mais confiável.
Explore nossas soluções para veículos autônomos
Nossas soluções se integram perfeitamente com plataformas UGV, para fornecer desempenho confiável, mesmo nas condições mais desafiadoras.

Ellipse-D

Ekinox Micro

Ekinox-D
Brochura de aplicações autônomas
Receba nosso folheto diretamente na sua caixa de entrada!
Estudos de caso
Descubra como as soluções inerciais da SBG Systems estão revolucionando a tecnologia de veículos autônomos em nossa seção de estudos de caso. Estes exemplos de sucesso no mundo real destacam como nossos sensores inerciais avançados oferecem navegação precisa e confiabilidade em ambientes desafiadores. Desde a melhoria da segurança de veículos em ambientes urbanos até a otimização do desempenho em cenários com GNSS negado, nossas soluções capacitam veículos autônomos a operar com precisão e controle incomparáveis.
Cada estudo de caso fornece informações valiosas sobre as formas inovadoras como nossa tecnologia está impulsionando o futuro do transporte autônomo.
Detecção de defeitos em trilhos da TREALIS com Apogee Navsight
Posicionamento de bondes e trens
Como a GapEOD promove levantamentos geofísicos mais seguros com Ellipse
Posicionamento de bondes e trens
Pesquisa sobre balsas autônomas em vias navegáveis urbanas reais
Navegação autônoma de balsas
Como Ellipse ajudou um barco movido a energia solar a competir em Mônaco
Barco movido a energia solar


Eles falam sobre nós
Ouça em primeira mão os inovadores e clientes que adotaram nossa tecnologia.
Seus depoimentos e histórias de sucesso ilustram o impacto significativo que nossos sensores têm em aplicações práticas de veículos autônomos.
Explore outras aplicações com sistemas inerciais autônomos
Descubra como os sistemas inerciais autônomos estão transformando as operações em diversos setores. Da robótica e automação industrial à mineração e logística, nossas soluções de alto desempenho fornecem dados precisos de navegação, orientação e movimento—mesmo em ambientes com restrições de GNSS. Explore novas possibilidades impulsionadas pela autonomia confiável.
Você tem perguntas?
Encontre respostas para as perguntas mais comuns sobre os aplicativos que apresentamos. Caso não encontre o que procura, não hesite em entrar em contato conosco diretamente para obter assistência.
Quais são os níveis de autonomia de veículos autônomos?
Os níveis de autonomia dos veículos autônomos são classificados em seis níveis (Nível 0 a Nível 5) pela Society of Automotive Engineers (SAE), definindo a extensão da automação na operação do veículo. Aqui está uma análise:
- Nível 0: Sem Automação – O motorista humano controla totalmente o veículo em todos os momentos, com apenas sistemas passivos, como alertas e avisos.
- Nível 1: Assistência ao Motorista – O veículo pode auxiliar na direção ou na aceleração/desaceleração, mas o motorista humano deve permanecer no controle e monitorar o ambiente (por exemplo, controle de cruzeiro adaptativo).
- Nível 2: Automação Parcial – O veículo pode controlar a direção e a aceleração/desaceleração simultaneamente, mas o motorista deve permanecer engajado e pronto para assumir o controle a qualquer momento (por exemplo, o Autopilot da Tesla, o Super Cruise da GM).
- Nível 3: Automação Condicional – O veículo pode lidar com todos os aspectos da condução em certas condições, mas o motorista humano deve estar pronto para intervir quando solicitado pelo sistema (por exemplo, condução em rodovia). O motorista não precisa monitorar ativamente, mas deve permanecer alerta.
- Nível 4: Alta Automação – O veículo pode executar todas as tarefas de condução de forma autônoma dentro de condições ou ambientes específicos (como áreas urbanas ou rodovias) sem intervenção humana. No entanto, em outros ambientes ou em circunstâncias especiais, um humano pode precisar dirigir.
- Nível 5: Automação Total – O veículo é totalmente autônomo e pode lidar com todas as tarefas de condução em todas as condições sem qualquer intervenção humana. Não há necessidade de um motorista, e o veículo pode operar em qualquer lugar, sob quaisquer condições.
Esses níveis ajudam a definir a evolução da tecnologia de veículos autônomos, desde a assistência básica ao motorista até a autonomia total.
O que é um odômetro?
Um odômetro é um instrumento usado para medir a distância percorrida por um veículo. Ele fornece informações importantes sobre o quão longe um veículo percorreu, o que é útil para vários fins, como agendamento de manutenção, cálculos de eficiência de combustível e avaliação do valor de revenda.
Odômetros medem a distância com base no número de rotações das rodas do veículo. Um fator de calibração, baseado no tamanho do pneu, converte as rotações da roda em distância.
Em muitas aplicações de navegação, especialmente em veículos, os dados do odômetro podem ser integrados com os dados do INS para melhorar a precisão geral. Este processo, conhecido como fusão de sensores, combina os pontos fortes de ambos os sistemas.
O que significam jamming e spoofing?
Jamming e spoofing são dois tipos de interferência que podem afetar significativamente a confiabilidade e a precisão de sistemas de navegação baseados em satélite, como o GNSS.
Jamming refere-se à interrupção intencional de sinais de satélite através da transmissão de sinais de interferência nas mesmas frequências usadas pelos sistemas GNSS. Essa interferência pode sobrecarregar ou abafar os sinais de satélite legítimos, tornando os receptores GNSS incapazes de processar as informações com precisão. O jamming é comumente usado em operações militares para interromper as capacidades de navegação dos adversários, e também pode afetar sistemas civis, levando a falhas de navegação e desafios operacionais.
O spoofing, por outro lado, envolve a transmissão de sinais falsificados que imitam sinais GNSS genuínos. Esses sinais enganosos podem induzir os receptores GNSS a calcular posições ou horários incorretos. O spoofing pode ser usado para desviar ou desinformar sistemas de navegação, potencialmente fazendo com que veículos ou aeronaves saiam do curso ou fornecendo dados de localização falsos. Ao contrário do jamming, que meramente obstrui a recepção do sinal, o spoofing engana ativamente o receptor, apresentando informações falsas como legítimas.
Tanto o jamming quanto o spoofing representam ameaças significativas à integridade de sistemas dependentes de GNSS, exigindo contramedidas avançadas e tecnologias de navegação resilientes para garantir uma operação confiável em ambientes contestados ou desafiadores.
O que é estimação?
A estima é um método de navegação que determina a posição atual de um veículo ao propagar continuamente uma posição passada conhecida, utilizando informações de movimento medidas, sem depender de sinais externos como o GPS.
Na prática, o sistema começa a partir de um ponto de referência — geralmente a última posição precisa conhecida — e utiliza sensores integrados, como acelerômetros, giroscópios, odometria de roda ou sensores de velocidade, para estimar como o veículo se moveu ao longo do tempo. Ao integrar essas medições de movimento, a estimação computa mudanças na velocidade, orientação e deslocamento, construindo gradualmente uma estimativa de posição atualizada. Embora forneça navegação totalmente autônoma, mesmo em ambientes com GPS negado ou degradado, a estimação está inerentemente sujeita ao acúmulo de erros: pequenos desvios do sensor, erros de fator de escala ou influências ambientais crescem com o tempo, fazendo com que a trajetória estimada se desvie da realidade.
Para mitigar esse desvio, a estimação é frequentemente combinada com auxílios externos, como GNSS, magnetômetros, barômetros ou técnicas de correspondência de terreno em sistemas de navegação inercial modernos. Apesar de suas limitações, a estimação continua sendo um princípio fundamental na navegação, porque garante o posicionamento contínuo em tempo real, mesmo quando referências absolutas não estão disponíveis.
O que é um sistema de navegação inercial?
Um sistema de navegação inercial (INS) é uma solução de navegação autônoma que determina a posição, velocidade e orientação de uma plataforma em movimento, medindo continuamente seu movimento por meio de sensores inerciais. Em sua essência, um INS baseia-se em uma tríade de acelerômetros para detectar acelerações lineares ao longo de três eixos perpendiculares e uma tríade de giroscópios para medir taxas angulares em torno desses mesmos eixos. Ao integrar essas medições ao longo do tempo, o sistema calcula como a velocidade, atitude e localização da plataforma evoluem a partir de um ponto de partida conhecido.
Como um INS não depende de sinais externos, como GPS, radiofaróis ou referências visuais, ele pode operar de forma confiável em ambientes onde os auxílios de navegação externos não estão disponíveis, são negados ou degradados, como debaixo d'água, em ambientes internos, subterrâneos ou em cenários militares de interferência de GNSS.
INS modernos geralmente incorporam algoritmos de filtragem sofisticados, mais comumente um filtro de Kalman, para fundir dados brutos de sensores, mitigar o drift e estimar o estado de navegação mais preciso. Em muitas aplicações, o INS é acoplado ao GNSS, odômetros, logs de velocidade Doppler ou magnetômetros para restringir o drift de longo prazo e fornecer navegação altamente estável. O resultado é uma solução de navegação robusta, com alta taxa de atualização, essencial para aeronaves, UAVs, mísseis, veículos autônomos, navios, AUVs e uma ampla gama de sistemas industriais que exigem consciência precisa e contínua de movimento e orientação.
