用于自动驾驶车辆的高精度导航
惯性导航系统 (INS) 为自动驾驶车辆应用提供了许多优势。通过使用加速度计和陀螺仪等传感器,INS 解决方案提供连续且准确的导航数据,而无需依赖外部信号。
我们的 INS 提供有关车辆位置、速度和方向的实时更新,即使在 GNSS 受限的环境中也能确保准确的导航。我们开发了先进的算法来最大限度地减少随时间推移产生的误差,从而保持车辆定位的准确性。

在具有挑战性的环境中具有强大的鲁棒性
我们的 INS 在 GNSS 受限区域(包括隧道、城市峡谷和茂密的树冠)中可靠运行。它可防止信号干扰和欺骗,同时补充 GNSS 以增强导航安全性。
该系统提供即时车辆运动反馈,从而实现快速决策和自适应响应。我们的 INS 无需依赖外部信号即可持续运行,非常适合动态环境。它为高级算法(例如路径规划、避障和路线优化)生成精确数据。因此,自主系统实现了更平稳、更高效的运行。
此外,无论天气、地形或信号中断如何,它都能保持一致的性能。从本质上讲,我们的 INS 增强了自主性,确保了可靠的导航,并使车辆能够在所有条件下安全高效地运行。

实时数据和传感器融合
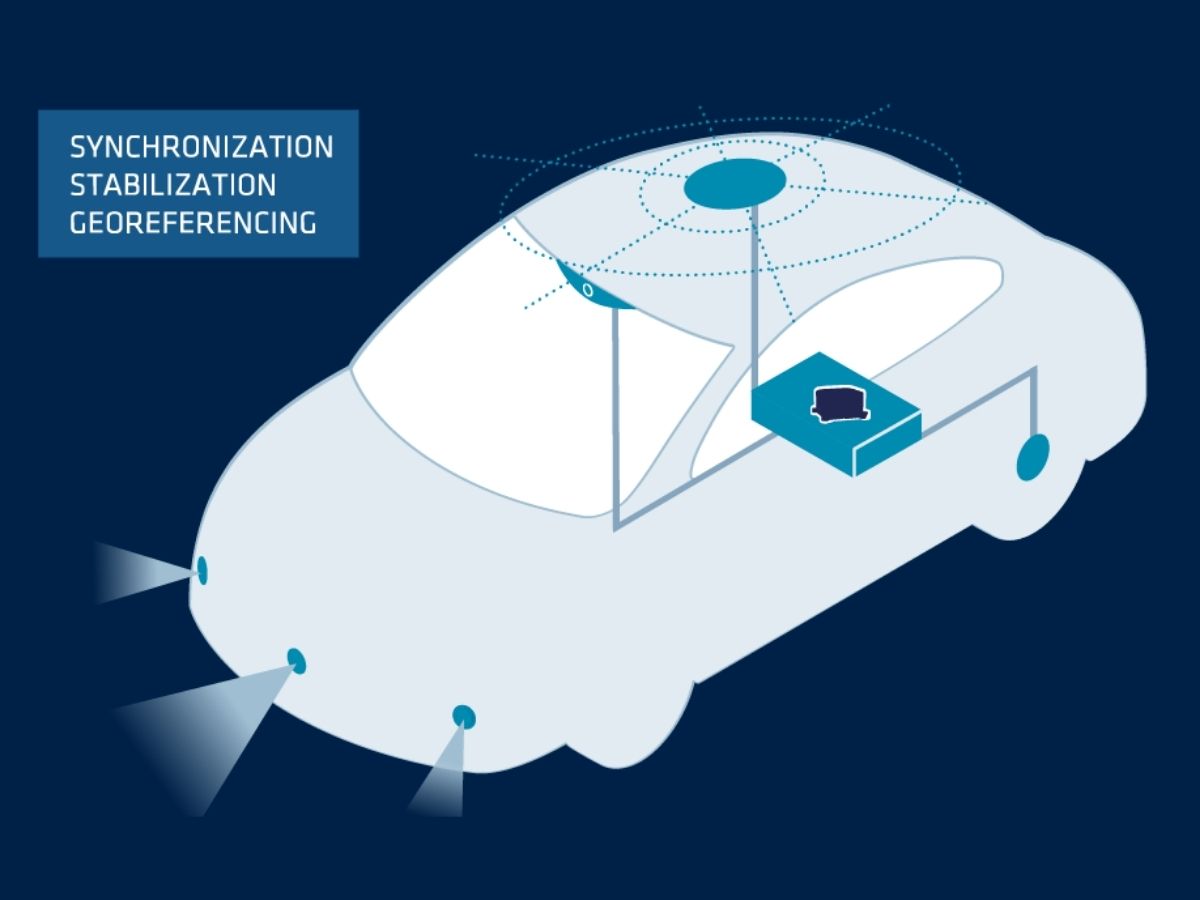
我们的传感器提供实时运动和方向数据,因此自动驾驶车辆可以立即调整转向、加速和制动,以响应地形、路况或交通的变化。它还有助于保持稳定性和控制。
与其它导航辅助设备(例如,GNSS、LiDAR、摄像头)结合使用,它们可以提高整体精度和可靠性。这些传感器融合增强了情境感知和决策能力。通过集成来自多个传感器的数据,我们的 INS 可以帮助纠正由外部因素引起的不准确性,从而确保更可靠的导航。
探索我们用于自动驾驶车辆的解决方案
我们的解决方案与 UGV 平台无缝集成,即使在最具挑战性的条件下也能提供可靠的性能。

Ellipse-D

Ekinox Micro

Ekinox-D
自主应用手册
将我们的产品手册直接发送到您的收件箱!
案例分析
在我们的案例研究部分中,了解 SBG Systems 的惯性解决方案如何彻底改变自动驾驶车辆技术。这些真实的成功案例突出了我们的先进惯性传感器如何在具有挑战性的环境中提供精确的导航和可靠性。从提高城市环境中的车辆安全性到优化 GNSS 受限场景中的性能,我们的解决方案使自动驾驶车辆能够以无与伦比的精度和控制运行。
每个案例研究都提供了宝贵的见解,了解我们的技术如何以创新的方式推动自动驾驶运输的未来。






他们在谈论我们
直接听取已采用我们技术的创新者和客户的意见。
他们的客户评价和成功案例说明了我们的传感器在实际的自动驾驶车辆应用中产生的重大影响。
探索自主惯性系统的其他应用
了解自主惯性系统如何改变各个行业的运营。从机器人技术和工业自动化到采矿和物流,我们的高性能解决方案提供精确的导航、方向和运动数据,即使在 GNSS 挑战环境中也是如此。探索由可靠的自主性驱动的新的可能性。
您有疑问吗?
查找有关我们展示的应用的最常见问题的答案。如果您找不到您要查找的内容,请随时直接与我们联系以获得帮助。
自动驾驶汽车的自主等级是什么?
根据美国汽车工程师学会 (SAE) 的定义,自动驾驶车辆的自主等级分为六个级别(0 级到 5 级),定义了车辆操作的自动化程度。以下是详细分类:
- 0 级:无自动化——驾驶员始终完全控制车辆,只有警报和警告等被动系统。
- 1 级:驾驶员辅助——车辆可以辅助转向或加速/减速,但驾驶员必须保持控制并监控环境(例如,自适应巡航控制)。
- 2 级:部分自动化——车辆可以同时控制转向和加速/减速,但驾驶员必须保持参与并随时准备接管(例如,特斯拉的自动驾驶仪、通用汽车的超级巡航)。
- 3 级:有条件自动化——车辆可以在某些条件下处理驾驶的各个方面,但驾驶员必须准备好在系统要求时进行干预(例如,高速公路驾驶)。 驾驶员无需主动监控,但必须保持警惕。
- 4 级:高度自动化——车辆可以在特定条件或环境(如城市区域或高速公路)内自动执行所有驾驶任务,无需人工干预。 但是,在其他环境或特殊情况下,可能需要人工驾驶。
- 5 级:完全自动化——车辆是完全自动的,可以在任何条件下处理所有驾驶任务,无需任何人工干预。 不需要驾驶员,车辆可以在任何条件下的任何地方运行。
这些级别有助于定义自动驾驶汽车技术的发展,从基本的驾驶员辅助到完全自动驾驶。
什么是里程计?
里程表是一种用于测量车辆行驶距离的仪器。它提供关于车辆行驶了多远的重要信息,这对于各种目的非常有用,例如维护计划、燃油效率计算和转售价值评估。
里程表根据车辆车轮的转数测量距离。基于轮胎尺寸的校准系数将车轮转数转换为距离。
在许多导航应用中,尤其是在车辆中,里程计数据可以与INS数据集成,以提高整体精度。此过程称为传感器融合,它结合了两个系统的优势。
什么是干扰和欺骗?
干扰和欺骗是两种可能严重影响基于卫星的导航系统(如 GNSS)的可靠性和准确性的干扰类型。
干扰是指通过在 GNSS 系统使用的相同频率上广播干扰信号来故意扰乱卫星信号。 这种干扰会压倒或淹没合法的卫星信号,导致 GNSS 接收器无法准确处理信息。 干扰通常用于军事行动中,以扰乱对手的导航能力,并且还会影响民用系统,从而导致导航失败和运营挑战。
另一方面,欺骗涉及传输模仿真实 GNSS 信号的伪造信号。 这些欺骗性信号会误导 GNSS 接收器计算不正确的位置或时间。 欺骗可用于误导或错误地通知导航系统,从而可能导致车辆或飞机偏离航向或提供错误的位置数据。 与仅阻碍信号接收的干扰不同,欺骗通过将虚假信息呈现为合法信息来主动欺骗接收器。
干扰和欺骗都对 GNSS 依赖系统的完整性构成重大威胁,因此需要先进的对抗措施和鲁棒导航技术,以确保在对抗性或挑战性环境中的可靠运行。
什么是航位推算?
航位推算是一种导航方法,它通过利用测量的运动信息,从已知的历史位置连续推算,从而确定车辆的当前位置,且不依赖于GPS等外部信号。
在实践中,该系统从参考点(通常是上次已知的准确位置)开始,并使用诸如加速度计、陀螺仪、车轮测距法或速度计之类的车载传感器来估计车辆随时间的移动方式。通过集成这些运动测量值,航位推算计算速度、方向和位移的变化,逐渐建立更新的位置估计。虽然即使在 GPS 受限或降级的环境中,它也能提供完全自主的导航,但航位推算本质上会受到误差累积的影响:小的传感器偏差、比例因子误差或环境影响会随着时间的推移而增长,导致估计的轨迹偏离实际情况。
为了减轻这种漂移,航位推算通常与外部辅助设备(例如 GNSS、磁力计、气压计或地形匹配技术)结合在现代惯性导航系统中。尽管存在局限性,但航位推算仍然是导航中的一项基本原则,因为它即使在没有绝对参考的情况下也能确保连续的实时定位。
什么是惯性导航系统?
惯性导航系统 (INS) 是一种独立的导航解决方案,通过利用惯性传感器连续测量移动平台的运动,从而确定其位置、速度和姿态。其核心在于,INS 依靠三轴加速度计感测沿三个垂直轴的线性加速度,并依靠三轴陀螺仪测量围绕相同轴的角速率。通过随时间积分这些测量值,系统可以计算出平台的速度、姿态和位置如何从一个已知的起始点演变。
由于 INS 不依赖于外部信号(如 GPS、无线电信标或视觉参考),因此它可以在外部导航辅助设备不可用、被拒绝或降级的环境中可靠地运行,例如水下、室内、地下或军事GNSS 干扰场景。
现代 INS 通常采用复杂的滤波算法,最常见的是卡尔曼滤波器,用于融合原始传感器数据、减轻漂移并估计最精确的导航状态。在许多应用中,INS 与 GNSS 耦合,或与里程计、多普勒测速仪或磁力计结合使用,以限制长期漂移并提供高度稳定的导航。由此产生的鲁棒、高更新率导航解决方案对于飞机、无人机、导弹、自动驾驶车辆、船舶、AUV 以及需要精确、持续感知运动和姿态的各种工业系统至关重要。
