Poprawa gromadzenia danych do map lotniczych
Systemy inercyjne, takie jak jednostki pomiaru inercyjnego (IMU) i inercyjne systemy nawigacyjne (INS), są kluczowymi elementami w lotniczych pomiarach pomiarowych.
Systemy te dostarczają dane w czasie rzeczywistym dotyczące orientacji, położenia i ruchu statku powietrznego, umożliwiając precyzyjne georeferencjonowanie zebranych obrazów i danych z czujników. Systemy inercyjne współpracują z GNSS Globalnym Systemem Nawigacji Satelitarnej), dzięki czemu nawet w przypadku słabego sygnału GNSS lub jego braku statek powietrzny nadal gromadzi dokładne informacje przestrzenne.
Jedną z istotnych zalet stosowania systemów inercyjnych w badaniach lotniczych jest ich zdolność do kompensowania ruchów statku powietrznego, takich jak pitch, roll i yaw, które mogą wpływać na jakość zebranych danych. Dzięki ciągłemu pomiarowi orientacji statku powietrznego, systemy inercyjne korygują wszelkie zniekształcenia w obrazach lub danych z czujników, zapewniając spójność i dokładność wyników. Jest to szczególnie ważne w zastosowaniach takich jak LiDAR, gdzie niewielkie niedokładności mogą skutkować znacznymi błędami w końcowym zbiorze danych.
Ponadto, systemy inercyjne zwiększają efektywność lotniczych pomiarów poprzez umożliwienie szybszego pozyskiwania danych bez pogorszenia dokładności. Specjaliści pomiarowi mogą latać na większych wysokościach i z większymi prędkościami, pokrywając większy obszar w krótszym czasie, co zmniejsza koszty operacyjne przy jednoczesnym osiągnięciu wysokiej jakości wyników.
Odkryj nasze rozwiązania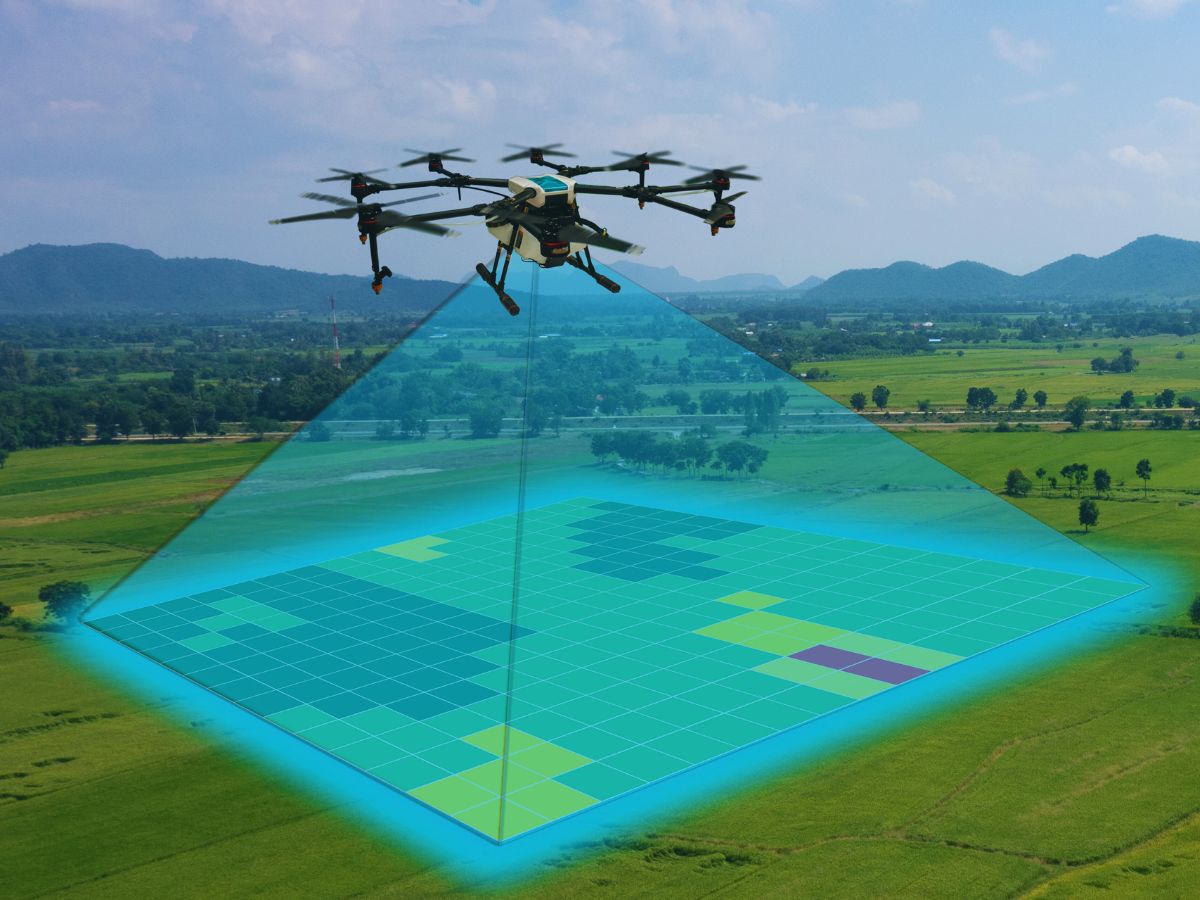
Zastosowania systemów inercyjnych w mapowaniu lotniczym
Systemy inercyjne odgrywają kluczową rolę w różnych zastosowaniach związanych z mapowaniem lotniczym. Na przykład, mapowanie korytarzowe obejmuje badanie długich, wąskich obszarów, takich jak drogi, linie kolejowe lub rurociągi. IMU i INS pomagają utrzymać dokładne wyrównanie danych wzdłuż mapowanej trasy.
Umożliwia to inżynierom i planistom wykonywanie precyzyjnych obliczeń dotyczących rozwoju i utrzymania infrastruktury.
W leśnictwie i rolnictwie systemy inercyjne pomagają dronom lub samolotom przelatywać nad dużymi obszarami w celu zbierania kluczowych danych. Dane te wspierają zarządzanie zasobami, monitorowanie upraw i ochronę środowiska. Dokładne mapowanie lasów i pól poprawia decyzje dotyczące użytkowania gruntów, nawadniania i zbiorów. Te spostrzeżenia zwiększają produktywność, jednocześnie zmniejszając wpływ na środowisko.
W budownictwie i planowaniu urbanistycznym lotnicze badania geodezyjne wspierane przez systemy inercyjne dostarczają szczegółowe mapy topograficzne i modele 3D terenu. Te zbiory danych są niezbędne do projektowania i wdrażania projektów na dużą skalę, ponieważ oferują jasne zrozumienie cech terenu i potencjalnych wyzwań. Dodatkowo, systemy inercyjne umożliwiają przetwarzanie danych w czasie rzeczywistym, co przyspiesza harmonogramy projektów i poprawia podejmowanie decyzji.
Lotnicze pomiary – pozycjonowanie i nawigacja w czasie rzeczywistym
W geodezji lotniczej połączenie systemów INS GNSS niezawodne rozwiązanie do pozycjonowania i nawigacji w czasie rzeczywistym. Systemy te współpracują ze sobą, zapewniając ciągły dopływ danych o wysokiej precyzji, niezależnie od warunków otoczenia. W środowiskach GNSS, takich jak gęste lasy lub obszary o silnym zachmurzeniu, systemy inercyjne zapewniają dokładne pozycjonowanie. Gwarantują one płynną kontynuację pomiarów, nawet bez sygnałów satelitarnych.
INS określa pozycję statku powietrznego za pomocą akcelerometrów i żyroskopów. Czujniki te śledzą przyspieszenie i ruch obrotowy. W połączeniu z GNSS tworzy to kompletny obraz toru lotu i pozycji statku powietrznego. Takie precyzyjne pozycjonowanie gwarantuje, że wszystkie zebrane dane są dokładnie georeferencjonowane.
Pozycjonowanie w czasie rzeczywistym ma kluczowe znaczenie w dynamicznych środowiskach, w których warunki ulegają szybkim zmianom, takich jak obszary dotknięte katastrofami (np. pożary lasów) lub aktywne place budowy. Umożliwia ono bieżące dostosowywanie tras lotu i ustawień gromadzenia danych. Ta elastyczność pomaga geodetom w pozyskiwaniu najbardziej istotnych informacji. W rezultacie poprawia się ogólna jakość i przydatność danych pomiarowych.

Odkryj nasze rozwiązania dla pomiarów lotniczych
Nasze produkty do pomiaru ruchu i nawigacji są dostosowane do potrzeb zastosowań w zakresie pomiarów lotniczych. Nasze wysokowydajne rozwiązania INS z GNSS zapewniają pozycjonowanie, nawigację i orientację w czasie rzeczywistym. Zapewniają doskonałą dokładność i niezawodność w pomiarach lotniczych.

Quanta Extra
Qinertia GNSS-INS
Broszura dotycząca zastosowań pomiarowych
Otrzymaj naszą broszurę prosto na swoją skrzynkę odbiorczą!
Studia przypadków
Dowiedz się, jak nasze produkty zostały z powodzeniem zintegrowane z aplikacjami do lotniczych pomiarów na całym świecie.
Nasze studia przypadków pokazują, jak systemy inercyjne SBG Systems poprawiają dokładność, niezawodność i wydajność w projektach mapowania lotniczego.
Od badań infrastruktury na dużą skalę po monitoring środowiska, nasze systemy inercyjne udowodniły swoją wartość w szerokim zakresie zastosowań.


SBG Systems podwójny INS/GNSS do topografii i batymetrii z wykorzystaniem UAV
Topografia i batymetria
Kompensacja ruchu i georeferencja LiDAR UAV
Pomiary z wykorzystaniem bezzałogowych statków powietrznych


Oni o nas mówią
Posłuchaj z pierwszej ręki innowatorów i klientów, którzy wdrożyli naszą technologię.
Ich referencje i historie sukcesu ilustrują znaczący wpływ naszych czujników w praktycznych zastosowaniach nawigacji UAV.
Poznaj inne zastosowania pomiarowe
Odkryj pełen potencjał naszych zaawansowanych rozwiązań nawigacji inercyjnej w szerokim zakresie zastosowań pomiarowych. Nasza technologia wspiera operacje lądowe, powietrzne i morskie. Zapewnia wiarygodne dane, wysoką precyzję i stałą wydajność w każdym środowisku.
Masz pytania?
Witamy w naszej sekcji FAQ! Znajdziesz tutaj odpowiedzi na najczęściej zadawane pytania dotyczące prezentowanych przez nas aplikacji. Jeśli nie znajdziesz tego, czego szukasz, skontaktuj się z nami bezpośrednio!
Jak mogę połączyć systemy inercyjne z LIDAR-em do mapowania dronem?
Połączenie systemów inercyjnych SBG Systems z LiDAR-em do mapowania dronowego zwiększa dokładność i niezawodność w pozyskiwaniu precyzyjnych danych geoprzestrzennych.
Oto jak działa integracja i jakie korzyści przynosi mapowaniu z wykorzystaniem dronów:
- Metoda teledetekcji wykorzystująca impulsy laserowe do pomiaru odległości od powierzchni Ziemi, tworząca szczegółową mapę 3D terenu lub struktur.
- Systemy INS SBG Systems łączą inercyjną jednostkę pomiarową (IMU) z danymi GNSS, aby zapewnić dokładne pozycjonowanie, orientację (pitch, roll, yaw) i prędkość, nawet w środowiskach pozbawionych sygnału GNSS.
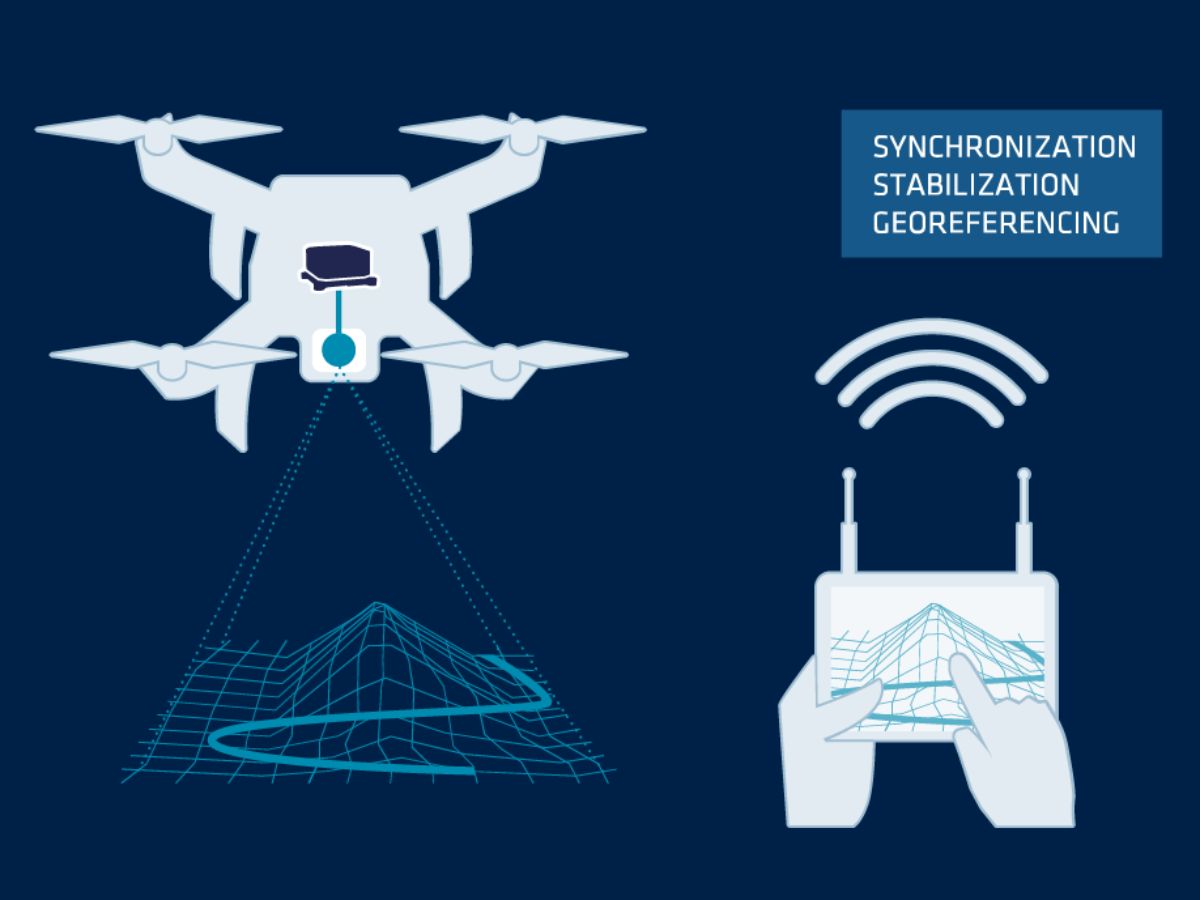
System inercyjny SBG jest zsynchronizowany z danymi LiDAR. INS dokładnie śledzi pozycję i orientację drona, podczas gdy LiDAR rejestruje szczegóły terenu lub obiektu poniżej.
Dzięki znajomości dokładnej orientacji drona, dane LiDAR mogą być precyzyjnie umieszczone w przestrzeni 3D.
Komponent GNSS zapewnia globalne pozycjonowanie, natomiast IMU oferuje dane o orientacji i ruchu w czasie rzeczywistym. Takie połączenie zapewnia, że nawet gdy sygnał GNSS jest słaby lub niedostępny (np. w pobliżu wysokich budynków lub gęstych lasów), INS może kontynuować śledzenie ścieżki i pozycji drona, umożliwiając spójne mapowanie LiDAR.
Co to jest georeferencja w lotniczych pomiarach geodezyjnych?
Georeferencja to proces dopasowywania danych geograficznych (takich jak mapy, zdjęcia satelitarne lub zdjęcia lotnicze) do znanego układu współrzędnych, tak aby można je było dokładnie umieścić na powierzchni Ziemi.
Umożliwia to integrację danych z innymi informacjami przestrzennymi, umożliwiając precyzyjną analizę i mapowanie oparte na lokalizacji.
W kontekście pomiarów geodezyjnych, georeferencja jest niezbędna do zapewnienia, że dane zebrane przez narzędzia takie jak LiDAR, kamery lub czujniki na dronach są dokładnie odwzorowywane we współrzędnych świata rzeczywistego.
Poprzez przypisanie szerokości geograficznej, długości geograficznej i wysokości do każdego punktu danych, georeferencja zapewnia, że zebrane dane odzwierciedlają dokładną lokalizację i orientację na Ziemi, co jest kluczowe dla zastosowań takich jak geoprzestrzenne mapowanie, monitorowanie środowiska i planowanie budowy.
Georeferencja zazwyczaj obejmuje wykorzystanie punktów kontrolnych o znanych współrzędnych, często uzyskiwanych za pomocą GNSS lub naziemnych pomiarów geodezyjnych, w celu dopasowania zebranych danych do układu współrzędnych.
Proces ten jest niezbędny do tworzenia dokładnych, wiarygodnych i użytecznych zbiorów danych przestrzennych.
Czym jest fotogrametria?
Fotogrametria to nauka i technika wykorzystywania zdjęć do pomiaru i mapowania odległości, wymiarów i cech obiektów lub środowisk. Analizując nakładające się obrazy wykonane pod różnymi kątami, fotogrametria umożliwia tworzenie dokładnych modeli 3D, map lub pomiarów. Proces ten działa poprzez identyfikację wspólnych punktów na wielu fotografiach i obliczanie ich pozycji w przestrzeni, z wykorzystaniem zasad triangulacji.
Fotogrametria jest szeroko stosowana w różnych dziedzinach, takich jak:
- Fotogrametryczne mapowanie topograficzne: Tworzenie map 3D krajobrazów i obszarów miejskich.
- Architektura i inżynieria: Do dokumentacji budynków i analizy strukturalnej.
- Fotogrametria w archeologii: Dokumentowanie i rekonstrukcja stanowisk i artefaktów.
- Lotnicze pomiary fotogrametryczne: Do pomiarów gruntów i planowania budowy.
- Leśnictwo i rolnictwo: Monitorowanie upraw, lasów i zmian w użytkowaniu gruntów.
Połączenie fotogrametrii z nowoczesnymi dronami lub UAV (bezzałogowymi statkami powietrznymi) umożliwia szybkie zbieranie zdjęć lotniczych, co czyni ją wydajnym narzędziem do projektów inwentaryzacyjnych, budowlanych i monitoringu środowiska na dużą skalę.
Co to jest IMU?
Inertial Measurement Unit (IMU) to kompaktowy moduł czujnika, który mierzy ruch i orientację platformy, rejestrując jej przyspieszenia liniowe i prędkości obrotu. U podstaw IMU integruje trzy akcelerometry i trzy żyroskopy rozmieszczone wzdłuż osi ortogonalnych, aby zapewnić sześć stopni pomiaru.
Akcelerometry wykrywają, jak platforma przyspiesza w przestrzeni, podczas gdy żyroskopy śledzą, jak się obraca. Przetwarzając te pomiary razem, IMU dostarcza precyzyjnych informacji o zmianach prędkości, orientacji i kursu bez polegania na jakichkolwiek zewnętrznych sygnałach. To sprawia, że IMU są niezbędne do nawigacji w środowiskach, w których GPS jest niedostępny, zawodny lub celowo zakłócany. Ich wydajność zależy w dużym stopniu od jakości czujników, kalibracji i tego, jak dobrze kontrolowane są błędy—takie jak odchylenia, szumy, współczynniki skali i niewspółosiowości.
Wysokiej klasy IMU zawierają zaawansowaną kalibrację, kompensację termiczną, filtrowanie drgań oraz mechanizmy stabilności dryftu, aby zapewnić, że błędy nie kumulują się szybko w czasie. Dzięki tym właściwościom IMU są wykorzystywane w szerokim zakresie zastosowań — od UAV, amunicji krążącej i pojazdów autonomicznych po AUV, robotykę i przemysłowe systemy stabilizacji — zapewniając niezawodne i ciągłe monitorowanie ruchu i orientacji nawet w najtrudniejszych warunkach operacyjnych.
