Amerykańskie cmentarze wojskowe zdigitalizowane dla uroczystej misji
“Wybraliśmy Ellipse-D ze względu na jego kompleksowe rozwiązanie GNSS i inercyjne, zamknięte w kompaktowym urządzeniu o niskim poborze mocy.” | Matthew R. Staley, Military Engineering & Survey Support Scientist w US Army Geospatial Center
Army Geospatial Center (AGC) zastosowało innowacje, aby pomóc odwiedzającym amerykańskie cmentarze wojskowe w odnalezieniu ich bliskich.
Tradycyjne metody pomiarowe GPS i digitalizacja map 3D zostały zintegrowane i zamontowane na plecaku specjalnie zbudowanym do zbierania danych w tym projekcie.
Interfejs internetowy, który działa jako front-end dla zebranych danych, zapewnia prosty interfejs dla odwiedzających, umożliwiający odnalezienie krewnych i dostęp do rozszerzonych informacji przechowywanych w bazie danych GIS.
Projekt pilotażowy dla uroczystej misji
Znalezienie konkretnego nagrobka na amerykańskim cmentarzu narodowym często wymaga obszernego i czasochłonnego przeglądania dokumentacji przez administratorów.
Aby pomóc odwiedzającym w łatwym odnalezieniu ich bliskich, Army Geospatial Center (AGC) we współpracy z Arlington National Cemetery (ANC) zakończyło projekt pilotażowy obejmujący cmentarze Corozal (Panama) i Normandia (Francja), które łącznie obejmują ponad 15 000 grobów.
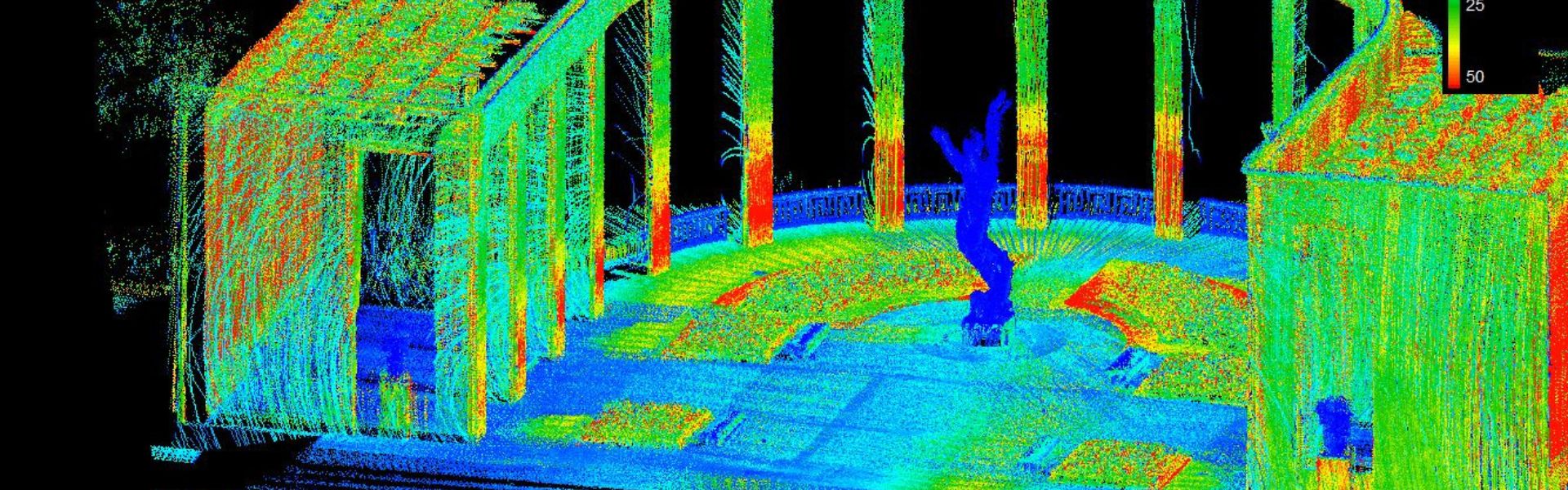
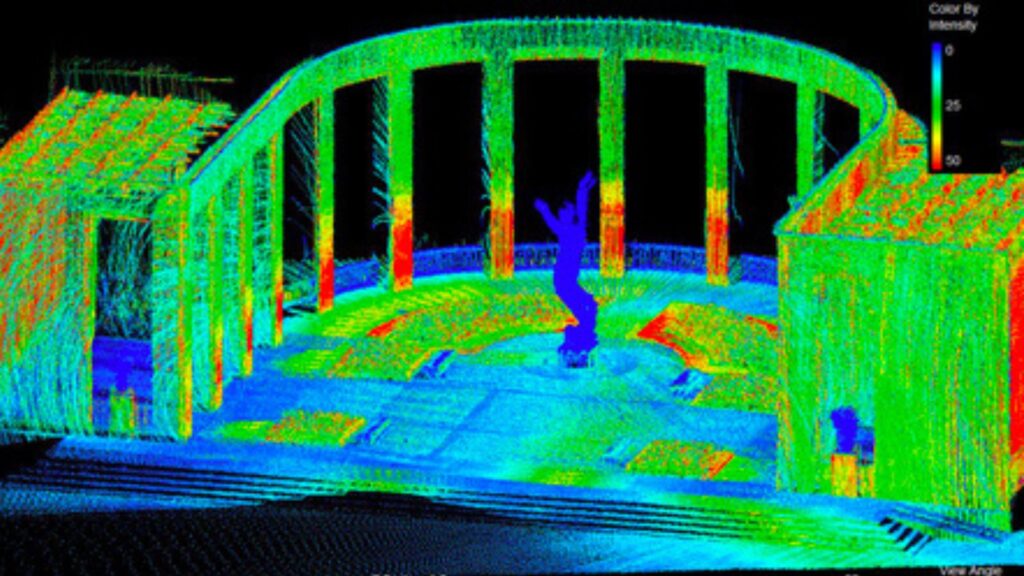
Ten ogromny projekt łączy tradycyjne metody pomiarowe i nowoczesne technologie w celu stworzenia wirtualnych modeli obu cmentarzy.
Modele obejmują nie tylko ukształtowanie terenu i współrzędne GPS dla każdego nagrobka lub pomnika, ale także elementy takie jak drogi, chodniki, drzewa, krawężniki, rynny, pomniki i wiele innych konstrukcji stworzonych przez człowieka z szacowaną dokładnością 10 cm (3,9 cala).
Zdjęcia geo-lokalizowane przodu i tyłu każdego nagrobka, aby pomóc w identyfikacji, uzupełniły rozwiązanie do zbierania danych.
Zebrane dane zostały przetworzone i zintegrowane na laptopie ENFIRE. Dzięki tym innowacjom odwiedzający mogą uzyskać dostęp do danych cmentarnych, wyszukiwać bliskich lub znajdować ważne historycznie groby za pomocą kiosków w obiektach, w których działa program ANC Explorer.
Wirtualni odwiedzający mają identyczną funkcjonalność, korzystając z programu na swoim komputerze domowym lub urządzeniu mobilnym.
Metoda mobilnego mapowania oparta na plecaku
Aby w całości odwzorować cmentarze z maksymalną szczegółowością, Matthew R. Staley, naukowiec zajmujący się wsparciem inżynierii wojskowej i pomiarów w US Army Geospatial Center, opracował rozwiązanie mobilnego mapowania opartego na plecaku.
Wykorzystanie tego sprzętu minimalizuje koszty poprzez skrócenie czasu akwizycji danych i dostarczanie danych w formatach łatwych do zarządzania. Wykorzystuje narzędzia używane przez U.S. Military Survey Services o nazwach ENFIRE i GPS-S.
„Połączyłem LiDAR firmy Velodyne z Inercyjnym Systemem Nawigacyjnym (INS) Ellipse-D z wbudowanym RTK GPS firmy SBG Systems” wyjaśnia Matthew R. Staley.
Wybrał Ellipse-D ze względu na kompleksowe rozwiązanie GNSS i Inercyjne zamknięte w kompaktowym urządzeniu o niskim poborze mocy.
INS/GNSS zapewnia kompensację ruchu i georeferencjonowanie chmury punktów. Ponadto, w celu uzyskania maksymalnej dokładności, na cmentarzu zainstalowano stację bazową Real Time Kinematic (RTK). Dodatkowo, oprogramowanie Hypack efektywnie zarządzało wygenerowaną chmurą punktów.
Dostosowywanie Deklinacji Magnetycznej
Jednym z wyzwań była kalibracja magnetometru, na którą wpływa zawartość żelaza w danym miejscu. Zmiana deklinacji magnetycznej zależy od lokalizacji; w związku z tym wysyłka plecaka z USA do Francji zmieniła deklinację magnetyczną.
Amerykańska Narodowa Agencja Oceanograficzna i Atmosferyczna (NOAA) aktualizuje globalną mapę pola magnetycznego Ziemi co 5 lat.
Mapa ta może być wykorzystana, przy uwzględnieniu konkretnej lokalizacji i daty, do określenia deklinacji magnetycznej w danym miejscu.
SBG Systems osadza tę mapę w swoich inercyjnych systemach nawigacyjnych, umożliwiając automatyczne określanie True North heading przy użyciu magnetometrów.
Pomiary geodezyjne wokół drzew
Kolejnym wyzwaniem były pomiary w pobliżu określonych gatunków drzew, które w znacznym stopniu wpływają na odbiór sygnału satelitarnego. Pan Staley zmodyfikował procedurę zbierania danych, aby zrekompensować ten problem i kontynuuje badania nad sposobami dalszego ograniczenia wpływu roślinności na odbiór sygnału.
Dodatkowo, redukcja zasięgu LiDAR w celu uzyskania lepszej dokładności (+/- 5 cm ogółem) zostanie zbadana jako sposób na ograniczenie artefaktów odchylenia.
“Wkrótce przetestuję oprogramowanie do post-processingu Qinertia firmy SBG, które może pomóc w utrzymaniu wysokiej dokładności w każdych warunkach” dodaje Inżynier Wojskowy Stanów Zjednoczonych.
Oprogramowanie Post Processing Kinematic (PPK), takie jak Qinertia, zapewnia dostęp do korekt RTK offline i zwiększa wydajność systemów nawigacji inercyjnej poprzez przetwarzanie danych inercyjnych z surowymi obserwacjami GNSS przy użyciu obliczeń zwanych Forward-Backward-Merge.
Niedawno wydane oprogramowanie Qinertia zostało zaprojektowane jako intuicyjne i łatwe w użyciu, a niezależne testy wykazały, że jest to najszybsze oprogramowanie do post-processingu na rynku.
Co dalej?
Główną misją było zebranie danych dotyczących pochówków oraz potwierdzenie przydatności zestawów narzędzi ENFIRE, GPS-S i LiDAR do eksploatacji i zarządzania Cmentarzem Narodowym w Arlington.
Uświadomiono sobie możliwość audytu terenów, aktualizacji rejestrów i oceny konstrukcji z wykorzystaniem zebranych danych LiDAR.
Ponadto opracowano plany strategiczne, które poprawiły efektywność ich procesów biznesowych.
Po zakończeniu fazy pilotażowej Army Geospatial Center ściśle współpracuje z Cmentarzem Narodowym w Arlington i Amerykańską Komisją Pomników Bitewnych w celu oceny wyników i określenia strategii dla przyszłych ulepszeń i innowacji.
Początkowe wyniki dowiodły, że koszty zostały zminimalizowane w porównaniu do poprzednich działań. Ponadto wiele społeczności osiągnęło doskonały ogólny zwrot z inwestycji.


Ellipse-D
Ellipse-D to inercjalny system nawigacyjny integrujący podwójną antenę i dwuczęstotliwościowy RTK GNSS, który jest kompatybilny z naszym oprogramowaniem do post-processingu Qinertia.
Zaprojektowana z myślą o robotyce i zastosowaniach geodezyjnych, może łączyć dane z licznika impulsów (Pulse) lub CAN OBDII w celu zwiększenia dokładności nawigacji inercyjnej.

Zapytaj o wycenę Ellipse-D
Masz pytania?
Witamy w naszej sekcji FAQ! Znajdziesz tutaj odpowiedzi na najczęściej zadawane pytania dotyczące prezentowanych przez nas aplikacji. Jeśli nie znajdziesz tego, czego szukasz, skontaktuj się z nami bezpośrednio!
Czy INS akceptuje dane wejściowe z zewnętrznych czujników wspomagających?
Inercyjne systemy nawigacyjne z naszej firmy akceptują dane wejściowe z zewnętrznych czujników wspomagających, takich jak czujniki danych lotniczych, magnetometry, odometry, DVL i inne.
Ta integracja sprawia, że INS jest wysoce wszechstronny i niezawodny, szczególnie w środowiskach, gdzie sygnał GNSS jest niedostępny.
Te zewnętrzne czujniki poprawiają ogólną wydajność i dokładność INS, dostarczając uzupełniające się dane.
Jaka jest różnica między AHRS a INS?
Główna różnica między Attitude and Heading Reference System (AHRS) a Inertial Navigation System (INS) polega na ich funkcjonalności i zakresie dostarczanych danych.
AHRS dostarcza informacji o orientacji — w szczególności o położeniu (pitch, roll) i kierunku (yaw) pojazdu lub urządzenia. Zazwyczaj wykorzystuje kombinację czujników, w tym żyroskopy, akcelerometry i magnetometry, do obliczania i stabilizacji orientacji. AHRS podaje pozycję kątową w trzech osiach (pitch, roll i yaw), umożliwiając systemowi zrozumienie jego orientacji w przestrzeni. Jest często stosowany w lotnictwie, UAV, robotyce i systemach morskich w celu zapewnienia dokładnych danych o położeniu i kierunku, co ma kluczowe znaczenie dla kontroli i stabilizacji pojazdu.
INS nie tylko dostarcza dane o orientacji (jak AHRS), ale także śledzi pozycję, prędkość i przyspieszenie pojazdu w czasie. Wykorzystuje czujniki inercyjne do szacowania ruchu w przestrzeni 3D bez polegania na zewnętrznych odniesieniach, takich jak GNSS. Łączy czujniki znajdujące się w AHRS (żyroskopy, akcelerometry), ale może również zawierać bardziej zaawansowane algorytmy do śledzenia pozycji i prędkości, często integrując się z danymi zewnętrznymi, takimi jak GNSS, dla zwiększenia dokładności.
Podsumowując, AHRS koncentruje się na orientacji (pozycji i heading), podczas gdy INS dostarcza pełny zestaw danych nawigacyjnych, w tym pozycję, prędkość i orientację.
Jaka jest różnica między IMU a INS?
Różnica między inercyjnym zespołem pomiarowym (IMU) a inercyjnym systemem nawigacyjnym (INS) polega na ich funkcjonalności i złożoności.
IMU inercyjny moduł pomiarowy) dostarcza surowe dane dotyczące przyspieszenia liniowego i prędkości kątowej pojazdu, mierzone za pomocą akcelerometrów i żyroskopów. Dostarcza informacji o przechyłach, pochyleniach, odchyleniach i ruchu, ale nie oblicza danych dotyczących pozycji ani nawigacji. IMU specjalnie zaprojektowana przekazywania niezbędnych danych o ruchu i orientacji do zewnętrznego przetwarzania w celu określenia pozycji lub prędkości.
Z drugiej strony, INS inercyjny system nawigacyjny) łączy IMU z zaawansowanymi algorytmami w celu obliczenia pozycji, prędkości i orientacji pojazdu w czasie. Wykorzystuje algorytmy nawigacyjne, takie jak filtrowanie Kalmana, do fuzji i integracji danych z czujników. INS dane nawigacyjne w czasie rzeczywistym, w tym pozycję, prędkość i orientację, bez konieczności polegania na zewnętrznych systemach pozycjonowania, takich jak GNSS.
Ten system nawigacyjny jest zazwyczaj wykorzystywany w zastosowaniach wymagających kompleksowych rozwiązań nawigacyjnych, szczególnie w środowiskach GNSS, takich jak wojskowe bezzałogowe statki powietrzne (UAV), statki i okręty podwodne.
Co to jest GNSS a GPS?
GNSS oznacza Globalny System Nawigacji Satelitarnej, a GPS Globalny System Pozycjonowania. Terminy te są często używane zamiennie, ale odnoszą się do różnych koncepcji w ramach satelitarnych systemów nawigacyjnych.
GNSS to zbiorcze określenie wszystkich satelitarnych systemów nawigacyjnych, natomiast GPS odnosi się konkretnie do systemu amerykańskiego. Obejmuje wiele systemów, które zapewniają bardziej kompleksowy zasięg globalny, podczas gdy GPS jest tylko jednym z tych systemów.
Dzięki integracji danych z wielu systemów uzyskujesz lepszą dokładność i niezawodność dzięki GNSS, podczas gdy sam GPS może mieć ograniczenia w zależności od dostępności satelitów i warunków środowiskowych.
