Mobilne mapowanie oparte na SLAM
vMS3D to mobilny system mapowania, który łączy w sobie to, co najlepsze w technologiach inercyjnych, GNSS i SLAM.
„INS Ellipse zapewnia bardzo, bardzo precyzyjne dane dotyczące prędkości.” | Mr. Ninot, założyciel VIAMETRIS

VIAMETRIS to prekursor w rozwoju rozwiązań opartych na SLAM. Dwa lata temu firma wprowadziła na rynek iMS3D, system mapowania wnętrz oparty na technologii SLAM.
Wykorzystując to doświadczenie, firma właśnie wprowadziła na rynek nowe rozwiązanie: vMS3D, mobilny system mapowania, który łączy w sobie to, co najlepsze w technologiach inercyjnych, GNSS i SLAM, oferując innowacyjne rozwiązanie o atrakcyjnym stosunku wydajności do ceny.
Najinteligentniejszy system mobilnego mapowania
vMS3D wygląda jak klasyczny system mobilnego mapowania (MMS). Integruje kamerę 360°, skaner LiDAR, wewnętrzny system nawigacji z odbiornikiem GNSS.
Prosty, automatyczny przepływ pracy nie ujawnia subtelnych, a jednocześnie wyrafinowanych obliczeń wewnętrznych, które czynią go wyjątkowym. Rzeczywiście, vMS3D jest wyposażony w dodatkowy LiDAR używany do obliczeń SLAM.
Po akwizycji oprogramowanie do post-processingu - o nazwie PPiMMS - automatycznie analizuje sytuacje, w których GNSS jest wystarczający, gdzie preferowana jest inercja lub gdzie wymagany jest SLAM.
To, co najlepsze w GNSS, inercji i SLAM
Rozwiązanie vMS3D uwzględnia zalety i wady każdej technologii, w zależności od warunków ich użytkowania:
- GNSS: Gdy odbiornik GNSS dostarcza wiarygodne dane, na przykład w otwartym środowisku, rozwiązanie opiera się na jego pozycji. W przypadku awarii lub zakłócenia GNSS, system wybiera między danymi inercyjnymi lub opartymi na SLAM
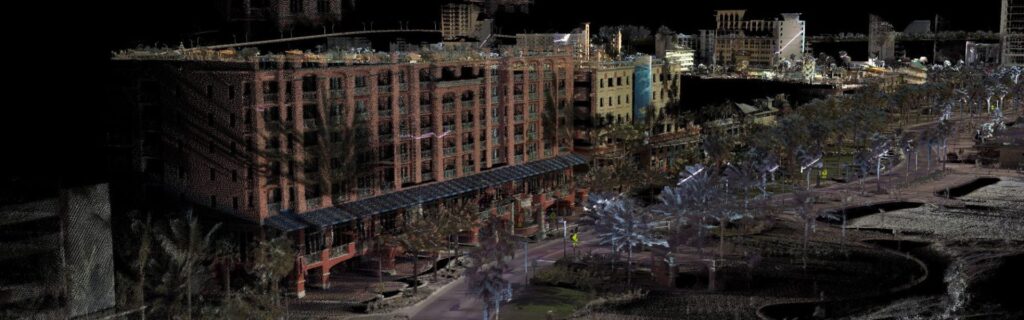
- SLAM: Pozycja obliczona na podstawie SLAM jest preferowana w gęstych środowiskach, gdzie otaczające obiekty są bardzo zróżnicowane i bliskie, na przykład w kanionach miejskich lub lasach. Możliwości SLAM są ograniczone w środowiskach, w których obiekty są zbyt odległe lub nierozróżnialne.
- Inercja: Informacje o prędkościach i orientacji dostarczane przez Inercyjny System Nawigacyjny (INS) mogą wspomagać nawigację we wszystkich przypadkach, w których GNSS i SLAM są ograniczone. Inercyjny System Nawigacyjny dostarcza informacje o roll i pitch, aby ograniczyć wszystkie dane LiDAR, dzięki czemu chmura punktów jest odniesiona do poziomu gruntu. Prędkości obrotu są również bardzo pomocne, zwłaszcza gdy następuje gwałtowna zmiana kierunku. Rzeczywiście, kompensacja orientacji jest wymagana między dwoma skanami, gdy LiDAR jest w ruchu.
Ellipse-D, inteligentny wybór VIAMETRIS
Już bardzo zadowolony z Ellipse dla swojego urządzenia iMS3D do użytku w pomieszczeniach, Jérôme Ninot, założyciel firmy VIAMETRIS, nie musiał długo szukać, aby wybrać system INS swojego nowego, innowacyjnego projektu.
Ellipse INS bardzo, bardzo precyzyjne dane dotyczące prędkości” – twierdzi pan Ninot.
Innowacyjne obliczenia SLAM pozwalają firmie VIAMETRIS polegać na miniaturowych i ekonomicznych czujnikach inercyjnych, podczas gdy inne systemy dostępne na rynku wymagają systemów inercyjnych o wyższej dokładności. Ellipse zapewniają dokładność położenia wynoszącą 0,1°.
Mr. Ninot wybrał również model Ellipse-D ze względu na jego wszechstronną i miniaturową formę oraz wbudowany odbiornik RTK GNSS.
“Dzięki zintegrowanemu systemowi INS, takiemu jak Ellipse-D, oferującemu pojedynczy interfejs komunikacyjny i wbudowaną synchronizację z GNSS i LiDAR, mogliśmy skoncentrować się na naszej wiedzy specjalistycznej w zakresie SLAM” dodaje dyrektor generalny, wspominając, że mniejsza ilość kabli jest zawsze dobrym wyborem.
Ellipse-D, partner do wielu zadań
Zintegrowany z tym innowacyjnym rozwiązaniem, Ellipse-D wykonuje kilka zadań. Po pierwsze, dostarcza informacje o roll i pitch, aby ograniczyć wszystkie dane LiDAR, dzięki czemu chmura punktów jest odniesiona do poziomu gruntu.
Po drugie, prędkości obrotu Ellipse-D są bardzo pomocne, szczególnie gdy następuje nagła zmiana kierunku. Rzeczywiście, kompensacja orientacji jest wymagana między dwoma skanami, gdy LiDAR jest w ruchu.
Wreszcie, Ellipse-D łączy w czasie rzeczywistym informacje inercyjne i GNSS, aby zapewnić doskonałe pomiary prędkości, które są również bardzo ważne, aby stale wspomagać wewnętrzne algorytmy vMS3D.

Ellipse-D
Ellipse-D to inercjalny system nawigacyjny integrujący podwójną antenę i dwuczęstotliwościowy RTK GNSS, który jest kompatybilny z naszym oprogramowaniem do post-processingu Qinertia.
Zaprojektowana z myślą o robotyce i zastosowaniach geodezyjnych, może łączyć dane z licznika impulsów (Pulse) lub CAN OBDII w celu zwiększenia dokładności nawigacji inercyjnej.

Zapytaj o wycenę Ellipse-D
Masz pytania?
Witamy w naszej sekcji FAQ! Znajdziesz tutaj odpowiedzi na najczęściej zadawane pytania dotyczące prezentowanych przez nas aplikacji. Jeśli nie znajdziesz tego, czego szukasz, skontaktuj się z nami bezpośrednio!
Jak mogę połączyć systemy inercyjne z LIDAR-em do mapowania dronem?
Połączenie systemów inercyjnych SBG Systems z LiDAR-em do mapowania dronowego zwiększa dokładność i niezawodność w pozyskiwaniu precyzyjnych danych geoprzestrzennych.
Oto jak działa integracja i jakie korzyści przynosi mapowaniu z wykorzystaniem dronów:
- Metoda teledetekcji wykorzystująca impulsy laserowe do pomiaru odległości od powierzchni Ziemi, tworząca szczegółową mapę 3D terenu lub struktur.
- Systemy INS SBG Systems łączą inercyjną jednostkę pomiarową (IMU) z danymi GNSS, aby zapewnić dokładne pozycjonowanie, orientację (pitch, roll, yaw) i prędkość, nawet w środowiskach pozbawionych sygnału GNSS.
System inercyjny SBG jest zsynchronizowany z danymi LiDAR. INS dokładnie śledzi pozycję i orientację drona, podczas gdy LiDAR rejestruje szczegóły terenu lub obiektu poniżej.
Dzięki znajomości dokładnej orientacji drona, dane LiDAR mogą być precyzyjnie umieszczone w przestrzeni 3D.
Komponent GNSS zapewnia globalne pozycjonowanie, natomiast IMU oferuje dane o orientacji i ruchu w czasie rzeczywistym. Takie połączenie zapewnia, że nawet gdy sygnał GNSS jest słaby lub niedostępny (np. w pobliżu wysokich budynków lub gęstych lasów), INS może kontynuować śledzenie ścieżki i pozycji drona, umożliwiając spójne mapowanie LiDAR.
Co to jest echosonda wielowiązkowa?
Echosonda wielowiązkowa (MBES) to zaawansowana technika hydrograficzna używana do mapowania dna morskiego i podwodnych elementów z dużą precyzją.
W przeciwieństwie do tradycyjnych echosond jednowiązkowych, które mierzą głębokość w jednym punkcie bezpośrednio pod jednostką, MBES wykorzystuje układ wiązek sonarowych do jednoczesnego rejestrowania pomiarów głębokości na szerokim pasie dna morskiego. Umożliwia to szczegółowe mapowanie terenu podwodnego w wysokiej rozdzielczości, w tym topografii, cech geologicznych i potencjalnych zagrożeń.
Systemy MBES emitują fale dźwiękowe, które przemieszczają się przez wodę, odbijają się od dna morskiego i wracają do jednostki. Analizując czas potrzebny na powrót echa, system oblicza głębokość w wielu punktach, tworząc kompleksową mapę podwodnego krajobrazu.
Technologia ta jest niezbędna do różnych zastosowań, w tym nawigacji, budownictwa morskiego, monitoringu środowiska i eksploracji zasobów, dostarczając krytycznych danych dla bezpiecznych operacji morskich i zrównoważonego zarządzania zasobami morskimi.
Jaka jest różnica między RTK a PPK?
Real-Time Kinematic (RTK) to technika pozycjonowania, w której poprawki GNSS są przesyłane niemal w czasie rzeczywistym, zazwyczaj przy użyciu strumienia poprawek w formacie RTCM. Mogą jednak wystąpić trudności w zapewnieniu poprawek GNSS, w szczególności ich kompletności, dostępności, zasięgu i kompatybilności.
Główną zaletą PPK nad RTK post processing jest możliwość optymalizacji czynności przetwarzania danych podczas post-processingu, w tym przetwarzania w przód i w tył, podczas gdy w przetwarzaniu w czasie rzeczywistym każda przerwa lub niezgodność w poprawkach i ich transmisji prowadzi do niższego poziomu dokładności pozycjonowania.
Pierwszą kluczową zaletą post-processingu GNSS (PPK) w porównaniu z czasem rzeczywistym (RTK) jest to, że system używany w terenie nie musi mieć łącza danych/radia do przekazywania poprawek RTCM pochodzących z CORS do systemu INS/GNSS.
Głównym ograniczeniem we wdrażaniu post-processingu jest wymóg działania aplikacji końcowej w danym środowisku. Z drugiej strony, jeśli Twoja aplikacja może wytrzymać dodatkowy czas przetwarzania potrzebny do wygenerowania zoptymalizowanej trajektorii, znacznie poprawi to jakość danych dla wszystkich Twoich produktów.
